

KUKA Positionierer - KUKA Robotics
KUKA Positionierer - KUKA Robotics
KUKA Positionierer - KUKA Robotics
- Keine Tags gefunden...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
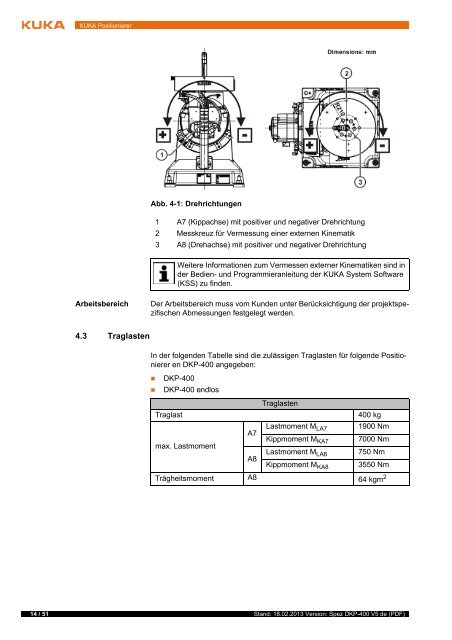
<strong>KUKA</strong> <strong>Positionierer</strong>Abb. 4-1: Drehrichtungen1 A7 (Kippachse) mit positiver und negativer Drehrichtung2 Messkreuz für Vermessung einer externen Kinematik3 A8 (Drehachse) mit positiver und negativer DrehrichtungWeitere Informationen zum Vermessen externer Kinematiken sind inder Bedien- und Programmieranleitung der <strong>KUKA</strong> System Software(KSS) zu finden.ArbeitsbereichDer Arbeitsbereich muss vom Kunden unter Berücksichtigung der projektspezifischenAbmessungen festgelegt werden.4.3 TraglastenIn der folgenden Tabelle sind die zulässigen Traglasten für folgende <strong>Positionierer</strong>en DKP-400 angegeben:• DKP-400• DKP-400 endlosTraglastenTraglast400 kgmax. LastmomentA7A8Lastmoment M LA7Kippmoment M KA7Lastmoment M LA8Kippmoment M KA81900 Nm7000 Nm750 Nm3550 NmTrägheitsmoment A8 64 kgm 214 / 51 Stand: 18.02.2013 Version: Spez DKP-400 V5 de (PDF)














