6. Vorlesung
6. Vorlesung
6. Vorlesung

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
„Sandwich“–Struktur☞ Beispiel: Mittelwert des Impulses⃗p〈 ⃗p〉==∫ ∫d 3 p⃗p|Φ(⃗p,t)| 2 = d 3 pΦ ∗ (⃗p,t)⃗pΦ(⃗p,t)∫ ( )d 3 rΨ ∗ (⃗r,t) −i⃗∇ Ψ(⃗r,t)Impulsdarstellung
„Sandwich“–Struktur☞ Beispiel: Mittelwert des Impulses⃗p〈 ⃗p〉==∫ ∫d 3 p⃗p|Φ(⃗p,t)| 2 = d 3 pΦ ∗ (⃗p,t)⃗pΦ(⃗p,t)∫ ( )d 3 rΨ ∗ (⃗r,t) −i⃗∇ Ψ(⃗r,t)☞ „Sandwich“–Formel〈O〉=∫d 3 rΨ ∗ (⃗r,t)OΨ(⃗r,t) =∫d 3 pΦ ∗ (⃗p,t)OΨ(⃗p,t)mitOrtsdarstellung ImpulsdarstellungOrt ⃗r i⃗∇ pImpuls −i⃗∇ ⃗p
Schwankungsquadrate☞ Schwankungsquadrat des Ortes(∆x) 2 = 〈 (∆x) 2〉 ∫= d 3 r (x−〈x〉) ∣ ∣ 2 Ψ(⃗r,t) 2☞ Schwankungsquadrat des Impulses(∆p x ) 2 = 〈 (∆p x ) 2〉 ∫= d 3 p (p x −〈p x 〉) 2∣ ∣∣ Φ(⃗p,t) 2
Schwankungsquadrate☞ Schwankungsquadrat des Ortes(∆x) 2 = 〈 (∆x) 2〉 ∫= d 3 r (x−〈x〉) ∣ ∣ 2 Ψ(⃗r,t) 2☞ Schwankungsquadrat des Impulses(∆p x ) 2 = 〈 (∆p x ) 2〉 ∫= d 3 p (p x −〈p x 〉) 2∣ ∣∣ Φ(⃗p,t) 2☞ Orts- und Impulsunschärfe∆x := √ (∆x) 2∆p x := √ (∆p x ) 2
Kommutatoren☞ Definition[a,b] := ab−ba☞ Beispiel[x,p x ]= xp x −p x x(−i ∂ ∂x= x)−(−i ∂ )x∂x= i
Kommutatoren☞ Definition[a,b] := ab−ba☞ Beispiel[x,p x ]= xp x −p x x(−i ∂ ∂x= x)−(−i ∂ )x∂x= i☞ Verallgemeinerung[x j ,p k ] = iδ jkδ jk ={1, j=k0, jk
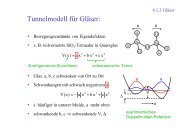
Drehimpulsoperator☞ Klassischer Drehimpuls: ⃗ L =⃗r×⃗p
Drehimpulsoperator☞ Klassischer Drehimpuls: ⃗ L =⃗r×⃗p☞ Quantenmechanik: Drehimpulsoperator⎛ ⎞ ⎛ ⎞(⃗L =⃗r× −i∇⃗ )= −i ⎝ ⎠⎝ x yz⎠×∂∂x ∂∂y∂∂z
Drehimpulsoperator☞ Klassischer Drehimpuls: ⃗ L =⃗r×⃗p☞ Quantenmechanik: Drehimpulsoperator⎛ ⎞ ⎛ ⎞(⃗L =⃗r× −i∇⃗ )= −i ⎝ ⎠☞ Komponenten(L x = −i y ∂ ∂z −z ∂ )∂y(L y = −i z ∂ ∂x −x ∂ )∂z(L z = −i x ∂ ∂y −y ∂ )∂x⎝ x yz⎠×∂∂x ∂∂y∂∂z
Drehimpulsoperator☞ Klassischer Drehimpuls: ⃗ L =⃗r×⃗p☞ Quantenmechanik: Drehimpulsoperator⎛ ⎞ ⎛ ⎞(⃗L =⃗r× −i∇⃗ )= −i ⎝ ⎠☞ Komponenten⎝ x yz⎠×∂∂x ∂∂y∂∂zL x = −i(y ∂ ∂z −z ∂ )∂yetc.
Drehimpulsoperator☞ Klassischer Drehimpuls: ⃗ L =⃗r×⃗p☞ Quantenmechanik: Drehimpulsoperator⎛ ⎞ ⎛ ⎞(⃗L =⃗r× −i∇⃗ )= −i ⎝ ⎠☞ Komponenten⎝ x yz⎠×∂∂x ∂∂y∂∂zL x = −i(y ∂ ∂z −z ∂ )∂yetc.☞ Vertauschungsrelationen (Übungen)[Lx ,L y][Ly ,L z]= iL z= iL x[L z ,L x ] = iL y
Stationäre Systeme☞ Annahme: V hängt nicht von der Zeit t ab
Stationäre Systeme☞ Annahme: V hängt nicht von der Zeit t ab➥ Separationsansatz(Ψ(x,t) = ψ(x) exp − iEt )
Stationäre Systeme☞ Annahme: V hängt nicht von der Zeit t ab➥ Separationsansatz(Ψ(x,t) = ψ(x) exp − iEt )☞ Einsetzeni ∂ ∂t Ψ(x,t) = i (− iE ) (ψ(x) exp − iEt )➥ Stationäre Schrödinger–GleichungHΨ(x,t) = EΨ(x,t)= EΨ(x,t)
Stationäre Systeme☞ Annahme: V hängt nicht von der Zeit t ab➥ Separationsansatz(Ψ(x,t) = ψ(x) exp − iEt )☞ Einsetzeni ∂ ∂t Ψ(x,t) = i (− iE ) (ψ(x) exp − iEt )➥ Stationäre Schrödinger–GleichungHΨ(x,t) = EΨ(x,t)= EΨ(x,t)➥ Eigenwertgleichung fürψHψ(x) = Eψ(x)
Eindimensionale PotentialproblemeV(x)x
Eindimensionale PotentialproblemeV(x)x☞ Stationäre Schrödinger–GleichungHψ(x) = Eψ(x)
Eindimensionale PotentialproblemeV(x)x☞ Stationäre Schrödinger–GleichungHψ(x) = Eψ(x)☞ Hamilton–OperatorH = −2 d 22m dx 2+V(x)
Bedingungen an die Lösungenψ(x)(W1)ψ muß normierbar sein, d.h.∫ ∞−∞dx|ψ(x)| 2 = 1
Bedingungen an die Lösungenψ(x)(W1)ψ muß normierbar sein, d.h.∫ ∞−∞dx|ψ(x)| 2 = 1(W2)ψ(x) muß stetig sein für alle x.
Bedingungen an die Lösungenψ(x)(W1)ψ muß normierbar sein, d.h.∫ ∞−∞dx|ψ(x)| 2 = 1(W2)ψ(x) muß stetig sein für alle x.(W2 ′ )ψ ′ (x) muß stetig sein für alle x, solange V eine endlicheFunktion ist.
Paritäts–Symmetrie☞ Ausgangspunkt: Symmetrie des PotentialsV(−x) = V(x)V(x)x☞ Spiegelungs- bzw. Paritäts–Symmetriex ↦→ −x,ddx ↦→ − d dx , d 2 d2↦→dx2 dx 2
Potentialtopf−aV(x)axV 0V(x) = −V 0 Θ(a−|x|)I II IIImitΘ(a−|x|) ={ 0 für x ≤ 01 für x > 0
Lösungen zu−V 0 < E
Lösungen zu−V 0 < E aψ ′′ (x) =mitκ :=⎪⎩√ 2m|E|− 2m(E+V 0) 2 ψ(x) =: −q 2 ψ(x) für|x| ≤ aund q :=√2m(E+V0 )
Lösungen im Innen- und Außenbereich☞ Lösungen im Außenbereich (|x|≥a)ψ(x) = C 1 e −κx +C 2 e κx☞ Normierbarkeitψ(x) ={C1 e −κx für x ≥ aC 2 e +κx für x ≤ −a
Lösungen im Innen- und Außenbereich☞ Lösungen im Außenbereich (|x|≥a)ψ(x) = C 1 e −κx +C 2 e κx☞ Normierbarkeitψ(x) ={C1 e −κx für x ≥ aC 2 e +κx für x ≤ −a☞ Lösungen im Innenbereich(|x|≤a)ψ(x) = C 3 e iqx +C 4 e −iqx = A cos(qx)+B sin(qx)
Gerade und ungerade Lösungen☞ Gerade Lösungen (Pψ(x)=+1·ψ(x))⎧⎨ A cos(qx) für |x| ≤ aψ(x) = Ce −κx für x ≥ a⎩Ce κx für x ≤ −a
Gerade und ungerade Lösungen☞ Gerade Lösungen (Pψ(x)=+1·ψ(x))⎧⎨ A cos(qx) für |x| ≤ aψ(x) = Ce −κx für x ≥ a⎩Ce κx für x ≤ −a☞ Ungerade Lösungen (Pψ(x)=−1·ψ(x))⎧⎨ B sin(qx) für |x| ≤ aψ(x) = C ′ e −κx für x ≥ a⎩−C ′ e κx für x ≤ −a
Gebundene Lösungen mit gerader Parität☞ Lösungen bestimmt durch tanz =√ξ 2 0 −z2zmit z := qa und ξ 0 :=√ 2mV0atanz√z 1 ξ0 2−z2zz 2 z 3π/2 3π/2 5π/2
Gebundene Lösungen mit gerader ParitätVx
Gebundene Lösungen mit gerader ParitätVx
Gebundene Lösungen mit gerader ParitätVx
Gebundene Lösungen mit ungerader Parität☞ Lösungen bestimmt durch−cot(z) =√ξ 2 0 −z2z−cotz√ξ 2 0 −z2z¯z 1¯z 2¯z 3π2π
Gebundene Lösungen mit ungerader Parität☞ Lösungen bestimmt durch−cot(z) =√ξ 2 0 −z2z−cotz√ξ 2 0 −z2z¯z 1¯z 2¯z 3π2π
Gebundene Lösungen mit ungerader Parität☞ Lösungen bestimmt durch−cot(z) =√ξ 2 0 −z2z−cotz√ξ 2 0 −z2z¯z 1¯z 2¯z 3π2π☞ #(gebundene Lösungen) abhängigvonξ 0 =√ 2mV0a
Gebundene Lösungen mit ungerader ParitätVx
Gebundene Lösungen mit ungerader ParitätVx
Gebundene Lösungen mit ungerader ParitätVx
Gebundene Zustände: Quantenmechanik−aV(x)axE 2E 1E 0☞ Zahl der Lösungen: endlich!☞ Spektrum: diskret!
Gebundene Zustände: Klassische Mechanik−aV(x)ax☞ Zahl der Lösungen: unendlich!☞ Spektrum: E beliebig in−V 0 < E