RADIO NAVIGATION EQUIPMENT
RADIO NAVIGATION EQUIPMENT
RADIO NAVIGATION EQUIPMENT
- Keine Tags gefunden...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
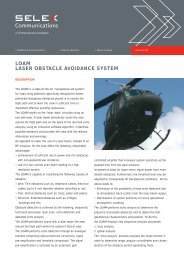
LOAM LASER OBSTACLE AVOIDANCE SYSTEM>Professional Communications > Telecom Operators > Military & Space > Avionics CNI<strong>RADIO</strong> <strong>NAVIGATION</strong><strong>EQUIPMENT</strong>SELEX Communications has developed state-of-the artexpertise in the field of radios thus achieving a word-leadingPosition in:> VOR> MMR> DME-P> ADFIn particular, our many years experience in the design andproduction of Radio Navigation has led to many remarkableachievements such as a significant reduction in size, weightand cost over current systems, and major improvements inperformance and reliability.These Equipment have been sold in thousands of units, andhave been adopted in a great numberof fixed and rotary wing aircraft world-wide:> TORNADO> EF 2000> EH-101> NH-90> C130J> C27J> B707ANV-211 P-DME Interrogator.DESCRIPTIONSANV-141 VOR/ILS/MRKANV-141 VOR/ILS/MRK AIRBORNE <strong>NAVIGATION</strong> SET.The ANV-141 is a VHF Navigation System capable of receivingand processing VOR and ILS Localizer (ICAO FM-compliant),Glideslope and Marker beacon signals.The ANV-141 provides 200 VOR/LOC channels from 108.00to 117.95 MHz with manual and automatic instrumentationoutputs and 20 paired Glideslope channels from 329.5 to335.0 MHz. The ANV-141 receiver is packaged in ashort/dwarf 1/2 ATR case and is designed to be mounted on eitherhard- or shock-mount, depending on customer requirements.The ANV-141 is a compact, all solid state avionic system thatmakes extensive use of modern technology to guarantee highperformances, high reliability and quality. The systems exceedsTSO specifications and fully meets military requirements.A standard 2-of-5 frequency selector tunes the ANV-141.The receiver may be adapted to different tuning control codesby changing plug in circuit cards.Quick access to the separate plug-in modules is provided by aremovable cover that can be raised to allow full servicing of the unitand/or modules. All controls and test points are readily accessible.A test connector is built into the ANV-141 for use with testequipment to reduce fault-finding time at the modules level.The ANV-141 can be supplied in the following configurations:> Manual VOR> Manual VOR with Glideslope> Manual VOR with Marker beacon> Manual VOR with Glideslope and Marker beacon> Automatic VOR> Automatic VOR with Glideslope> Automatic VOR with Marker beacon> Automatic VOR with Glideslope and Marker beacon
<strong>RADIO</strong> <strong>NAVIGATION</strong> <strong>EQUIPMENT</strong>ANV-211 P-DME INTERROGATOR.The ANV-141 is a Distance Measuring Equipment Interrogatorcapable of receiving accurate distance information fromDME/P Transponders and standard DME/N Transponders.Performance of DME/N Interrogator is enhanced by theaddition of the DME/P IA mode.When used with other systems, such as VOR, ILS,Microwave landing System (MLS), etc., the ANV-211 meetsthe needs of a variety of users in the en-route, approach,landing, missed approach and departure phases of flight.The ANV-211 P-DME is an integral element of the SELEXCommunications Microwave Landing System (MLS) wherethe angular information is provided by the MLS receiverANV-201 or by the Multi Mode Receiver (MMR) ANV-241.These units provide a highly accurate 3D position systemcapable of elaborate Terminal Area Navigation by followingprecise curved and segmented, flight paths from theApproach Area through touch-down and rollout.The ANV-211 meets the requirements specified into RTCA DO-189.The ANV-211 comprises two Line Replaceable Units (LRU):the Interrogator unit, and the Control Panel. An optionalMMR/DME Multifunction Control panel (MCP) is also available.The ANV-211 can also be remotely controlled trough thestandard MIL-STD-1553B or Arinc 429 interfaces.The ANV-211 Interrogator has been designed around a powerfulmicroprocessor and modular structure to provide maximumgrowth capability. Special attention has been devoted tobuilding a comprehensive self-test capability into theInterrogator to give a high degree of confidence about theunit’s operational status, and a high probability of being ableto trace any faults to module level.The ANV-211 has been designed to meet the stringentenvironmental requirements, of high performance militaryaircraft. It is also designed to meet the EMC and Environmentalrequirements of MIL-STD-461 and MIL-STD-810.Thermal and mechanical integrity is achieved trough the useof a rugged internal frame which dispenses with the need forforced air cooling and vibration isolator mounting.ARG-80 Automatic Direction Finder (ADF)ANV-241AAirborne precision landing Multi-Mode Receiver (MMR).ANV-241 AIRBORNE PRECISION LANDINGMULTI-MODE RECEIVER (MMR).The ANV-241, is an integrated Multi-Mode Landing Systemgiving a world-wide precision approach and landing capability,providing a cost-effective, state of the art solution for avionicsupgrades and new installations.TheANV-241 single-box Multi-Mode Receiver (MMR) canoperates in four principle modes:> Protected Instrument Landing System (ILS), ICAO FM-compliant,> Microwave Landing System (MLS):- Auto mode- Manual mode- Computed mode> Embedded VHF Data Link Receiver Modem for LAAS,> DGPS - LAAS &WAAS, 12-Channel GRAM, C/A & P(Y)Modes (growth capability).This fusion provides the means for aircraft flying in Europe totake advantage of the flexibility and economy of operationoffered by European Basic Area Navigation (BRNAV) routesand GPS-based approaches.The MMR accommodates a large variety of landing facilities(offset and split site).The ANV-241 can accept DME/N/P, Tacan, or GPS rangingsources and can also be remotely controlled andtransmit/receive data trough the standard MIL-STD-1553B orArinc 429 interfaces. Analog Interfaces are also provided.An optional MMR/DME Multifunction Control Panel (MCP) isalso available.The ANV-241 has been designed using a modular structureto provide maximum growth capability. Special attention hasbeen devoted to building a comprehensive self-test capabilityinto the MMR to give a high degree of confidence about theunit’s operational status, and a high probability of being ableto trace any faults to module level.The ANV-241 is ICAO-compatible for Civil and Militaryinter-operability.The MMR is available in two different case formats:> the ANV-241, fitting the existing USAF AN/ARN-108 ILSform factor> and the ANV-241A, hosted in a 3/8 ATR short box format(accpording to ARINC 404.The ANV-241 family incorporates all the latest designtechniques to achieve high reliability and maintainability aswell as provide a simple, economical installation both toendows an aircraft with multi-mode capacity (navigation) andreplaces old ILS equipment not ICAO FM-compliant.
O&K RL1c Chassis – Bauanleitung für das Ausgleichs-FahrwerkWarnhinweis: Der Bau des sehr kleinen Chassis mit Ausgleichs-Fahrwerk wie dieses, kann zu psychischen Belastungenführen. Für die starre Fahrwerksvariante lesen Sie bitte die Seite 1. Sollte dies Ihr erster Bau einesLokomotivenbausatzes sein, so empfehle ich Ihnen den Bau der starren Fahrwerksversion. Diese Variante ist lediglichfür geübte Bausatzmonteure geeignet.RahmenEntfernen Sie den Fahrwerksrahmen (K1) aus dem Ätzblech, seien Sie dabei vorsichtig daß Sie das dünne Blech nicht verbiegen.Benutzen Sie eine lange Zange und biegen Sie die beiden Seitenteile an den Verbindungsstege um 90 Grad so das die angeätzteFaltlinie nach innen zeigt. Entfernen Sie die zwei Querstreben (K2) aus dem Ätzblech. Falten Sie den großen sowie die zwei kleinerenBlechteile um 90 Grad so das die angeätzte Faltlinien nach innen zeigt und dieser in den Fahrwerksrahmen passt. Wiederholen Siedies auch bei dem zweiten Bauteil. Setzten Sie die beiden Querstreben (K2) in den Fahrwerksrahmen (K1) ein und verlöten diesemiteinander. Der große Lappen sollte hierbei auf dem Ende des Rahmens liegen. Entfernen Sie die beiden Chassisverstärkungen (K3)aus dem Ätzblech. Zwängen Sie eine der Aussenseiten des Chassis an der angeätzten Biegefalte, so das die Biegefalte innen ist, undverlöten diese miteinander. Wiederholen Sie dies auf der anderen Seite. Biegen Sie die beiden vertikalen Motorhalter vomChassismittelpunkt nach aussen, so daß ein Abstand von 6,5mm entsteht. Falten Sie die beiden oberen Lappen horizontal übereinanderund verlöten diese miteinander. Entfernen Sie die Fahrwerksversteifung (K4) aus dem Ätzblech und setzten dieses in den Rahmen vorder U-förmigen Aussparung ein. Achten Sie darauf das die Fahrwerksversteifung im 90 Grad Winkel zum Rahmen sitzt. VerwendenSie hierzu das Ätzblech als 90 Grad Lehre. Die Platte sollte bündig mit dem Boden des Chassis abschliessen und geringfügig unter derOberkante sitzten. Entfernen Sie das Ätzblech und löten Sie die Fahrwerksversteifung an. Schneiden Sie nun vorsichtig je Seitenteildes Rahmen das U auf und verwenden Sie eine kleine Säge oder eine scharfe eckige Feile hierzu. Verwenden Sie keine Zangen,Seitenschneider oder Messer, diese würden das Chassis verbiegen. Säubern Sie den Ausschnitt mit einer Nadelfeile.RäderLegen Sie sich die beiden Messingrohre mit 5mm Länge mit Durchmesser 2mm bereit ( Bauteil F). Kürzen Sie diese solange bis sielocker zwischen dem Rahmen Ihres Chassis passen (ca. 4mm-4,5mm) –benutzen Sie hierzu eine Feile oder eine Säge. Reinigen Sie dieEnden und Kanten diese ab. Bohren Sie ein 0,8mm Loch, so nah wie möglich am Ende des 2mm Messingröhrchens . Dieses ermöglichteine Nadel als Mitnehmer zur Fixiuerung einzustecken. Suchen Sie sich die zwei schwarzen Kunststoff-Zahnräder raus und plazierenSie diese mittig auf dem ∅2mm Messingröhrchens. Seien Sie hierbei vorsichtig, daß Sie die Zähne nicht mit einem Werkzeugbeschädigen. Suchen Sie sich die Radsätze (Bauteil C) heraus. Feilen Sie die Spitze der Achse mit einer Feile ab. Entfernen Siejeweils den isolierten Radsatz von der Achse. Dies sollte wenn möglich ohne Werkzeug abziehbar sein. Anderfalls nehmen Sie dieAchse ca. 1mm nach dem Radsatz mit einer Spitzzange auf und pressen den Radsatz mit einer gebogenen Pinzette gegen dieZangenbacken. Sie sollten hierbei darauf achten, dass Sie die Plastikisolierung des Radsatzes nicht verlieren und ihn gegebenfalls mitSekundenkleber wieder dauerhaft befestigen.Entfernen Sie den Vorlaufrahmen (K10) aus dem Ätzblech. Falten Sie alle Ecken so, das die angeätzte Faltlinien nach innen zeigen.Bevor Sie es zusammenlöten, vergrößern Sie die seitlichen Bohrungen für den Radsatz sowie die Bohrungen für die Antriebswelle auf1,5mm mit dem Stichel od. Reibahle. Versicheren Sie sich, dass die Bohrungen für Radsatzachse ausgerichtet sind, bevor Sie denRahmen verlöten.Entfernen Sie die briefmarkenähnliche Verzahnnung an beiden Rahmenseiten, welches die starren Achsbohrungen beinhaltet (s.Zeichnung). Dies wird am besten erledigt, indem Sie die beiden kleinen Verbindungsstege abfeilen und durch mehrfaches Biegen dasteil rauslösen. Benutzen Sie hierbei kein Messer und keine Zange, dass würde Ihren Rahmen zerstören. Entgraten Sie die Bruchstelle.Schieben Sie den Vorlaufrahmen in den Chassisrahmen ein, alle Achsenbohrungen sollten in einer Flucht sein.Versuchen Sie die Achsen in die vorgesehene Bohrungen des Chassisrahmen und des Vorlaufrahmen einzusetzten. Falls erforderlichdrücken Sie die Löcher im Chassis und im Vorlaufrahmen mit einem 1,5 mm Stößel oder Ahle auf (beginnen Sie mit einem kleinerenDurchmesser und vergrößern Sie den Durchmesser schrittweise), so das die Radsatzachsen zwar frei drehbar gelagert sind aber keinbeträchtliches Seitenspiel mehr haben. Montieren Sie die hintere (starre) Radsatz-Achse durch den linken Rahmenteil (von obengesehen), und stecken Sie das Messingröhrchen mit den schwarzen Kunststoff-Zahnrad von der rechten Rahmenteil darüber.Montieren Sie vorsichtig den isolierten Radsatz auf das freie Ende und achten Sie auf die gerade Ansetzung, am besten wenn Sieam Isolierring eindrücken und nicht am Metallrad selber. Wiederholen Sie diesen Vorgang auch bei dem Vorlaufrahmen undbeachten Sie, das der isolierte Radsatz auf der selben Seite sitzt. Positionieren Sie das Messingröhrchen mittig auf der Achse. Sitztdas Messingröhrchen mit den schwarzen Kunststoff-Zahnrad nicht fest genug auf der Radachse, fixieren Sie diese mit einer kleinenMenge Blue Loctite 242 od. ähnlichen.FrontK5RearK6x 2AntriebsachseEntfernen Sie die beiden Antriebsachsenlager (K5 & K6) aus dem Ätzblech. Benutzen Sie einen 1,5mm Stößel od. Reibahle undstechen Sie das Loch soweit auf, das die Antriebsachse (G) frei in der Bohrung drehen kann. Montieren Sie den Frontträger (K5) losezwischen den Rahmen, im Bereich vor dem Vorlaufrahmen. Montieren Sie den hinteren Träger (K6) 1mm hinter dem schwarzenKunststoff-Zahnrad an der Hinterachse. Überprüfen Sie den Abstand zwischen den beiden Trägern. Dieser sollte 18mm +/- 0,2mmsein. Justieren Sie dies falls erforderlich.Entfernen Sie die sieben Ringe (K9) aus dem Ätzblech und entgraten Sie diese.3 2 2Legen Sie sich die Antriebsachse (G), die beiden Zahnschnecken, das Reibungsrad aus Messing (I) und den O-Ring (H) bereit. ZiehenSie den O-Ring auf das Reibungsrad auf. Montieren Sie die Zahnschnecken und das Reibungsrad auf die Antriebsachse, so dass dasReibungsrad in der Mitte sitzt und die Zahnschnecken auf jeder Seite (lassen Sie den Vorlaufrahmen aus, dies ist eineVersuchsmontage). Dies sollte ohne Werkzeug passieren, bohren Sie ggf. die Bohrungen der Zahnschnecken auf. Setzten Sie dievorbereitete Antriebsachse über die schwarzen Kunststoffzahnräder.Setzen Sie hierzu zuerst Achse vorne in die Lagerung ein. Beachten Sie, das die hintere Lagerung die Achse nur hält. ÜberprüfenSie, das die beiden Lager in der o.g. Position sind, die hintere Zahnradschnecken 1mm über den schwarzen Kunststoff-Zahnräderliegt, und Platz für zwei Ringe zwischen der hinteren Zahnradschnecke und der hintere Lagerung vorhanden ist. Überprüfen Sie auchdas die hintere Räder leicht laufen (Zahnräder und Schnecken dürfen nicht zu hart einzahnen) und das die Antriebswelle leichgängigläuft. Falls erforderlich, verändern Sie die Positionen der Lagerungen nochmal. Zeichnen sie die Positionen der Lagerungen an undentfernen Sie die Antriebswelle. Positionieren Sie die beiden Lagerungen wieder vorsichtig und löten diese fest.Nigel Lawton 009 O&K RL1c Montania Bauanleitung V20 Chassis & V17 Body 3
ANV-211 CharacteristicsOperationalCoverage limitsP-DME CharacteristicsRTCA/DO 189 DME/P MinimumPerformance Standard for AirborneDistance Measuring EquipmentAccuracyRangeElectricalFrequency rangeNo. of channelsChannel spacingPower outputSensitivityInterfacesPower requirementsEnvironmentalTemperature/altitudeThermal shockYaw plane360 degreesPitch plane-40 to +25 degrees with respect to the horizontal(no garble, no multipath)IA Mode- PFE: ±30 m- CMN: ±15 mFA Mode- PFE: ±15 m- CMN: ±10IA Mode 8 ±25 NMFA Mode 0 ±8 NMDME/N Mode 0 ±300 NMTX 1025 – 1150 MHzRX 962 – 1215 MHz126 for every X, Y, Z and W mode1 MHz800 W peakIA better than -89 dBmFA better than -79 dBmDiscrete and analogARINC 429MIL-STD-1553B Remote Terminal (optional)Interrogator less than 28 VDC/50 WOperative -40 to +70°C (50,000 ft)Storage -60 to +90°CMIL-STD-810D, Method 520, Proc. IIIInterrogator Temp. Limits -54 to +71°CMIL-STD-810D, Method 503.2Vibration MIL-STD-810D, Method 514.3Acceleration MIL-STD-810D, Method 513.3Electr. compatibiIityMIL-STD-461AANV-241 CharacteristicsOperationalEmbedded DGPS PA (Optional)Performance CharacteristicsReliabilitySupportabilityFeaturesARG 80 CharacteristicsGeneralFrequency rangeChannel spacingDistress frequencystabilityTuning speedProvides Precision ILS and MLS landing guidance with DGPS OptionAccepts DME/N/P, TACAN or GPS ranging sourcesAccommodates variety of landing facilities (offset and split site)Growth Capability through modular architectureICAO-Compatible Civil and Military inter-operabilityC/A and P(Y) Modes, L1, L2GPS Receiver Applications Module (GRAM) compliantRAIM and Fault Detection and Exclusion (FD&E)Growth to Wide Area Augmentation (WAAS)Accepts external GPS PVT dataEmbedded LADGPS Data linkMLS performance per RTCA/DO-177ILS performance per RTCA/DO-195, 192, 143 in Compliance with newFM Interference requirementsVOR per RTCA/DO-196DGPS Precision approach performance per RTCA/DO-217 SCAT-1VHF: RTCA/DO-217 Appendix F (Change 2) D8PSK VDLSA/AS Compliant per ICD-GPS-222/225Differential Capability per RTCA/DO-217Communicates over both MIL-STD-1553 and ARINC 429Operates from +28 VDC per MIL-STD-704 (Cat. B)> 10,500 hours MTBF per MIL-HDBK-217E, +71°CAirborne Uninhabited FighterModular design for easy assembly/disassemblyMTTR < 30 minNo scheduled maintenanceAchieves low cost through advanced technology MMIC and VLSIGrowth features: flexible architectureComprehensive (>95%) Built-in-Test coverageComputer software programmed in ADA and reprogrammablevia the MIL-STD-1553 data bus190 to 1749.7 MHz0.5 kHz2182 kHz (ARG-80A version)InstantaneousFrequency selection BCD (ARINC 570)ADF accuracy± 3° on all signals above70 µV/m to 0.5 V/m antenna fieldReceiver sensitivity Antenna 70 µV/m for 6 dB ((S + N)/ N)ADF 100 µV/m for 6 dB ((S + N)/ N)I.F. bandwidth(selectivity)Spurious responseAudio outputBearing informationPower supplyEnvironmentalTemperature ReceiverAntennaStorageAltitudeHumidity ReceiverAntennaVibrationShockmountShockShockmount2.8 kHz at -6 dB, 14 kHz at -80 dBBetter than 80 dB below desired signal100 mW into 600 ohm3-wire synchro bearing RMI indicator27 VDC 600 mA, 26 VAC 280 mA 400 Hz(Normal Operating) -54 to +55°C-65 to +71°C-65 to +71°C18000 metres (60000 Ft)95% at +50°C (48 hours)95% at +71°CRigid Mount DO-138 Cat. J and NDO-138 Cat. GRigid mount 6g for 10 msec15g for 10 msecSELEX Communicationse-mail: info@selex-comms.comwww.selex-comms.comThis publication is issued to provide outline information only which (unless agreed by SELEXCommunications S.p.A. in writing) may not be used, applied or reproduced for any purposeor form part of any order or contract or be regarded as a representation relating to theproducts or services concerned. SELEX Communications S.p.A. reserves the right to alterwithout notice the specification, design or conditions of supply of any product or service.SELEX Communications logo is a trademark of SELEX Communications S.p.A.Printed in Italy.© SELEX Communications S.p.A. All Rights reserved.CODE e-A-IT-008/V1/06/X




![ENG [PERSEUS] WiNNMobile-V2_1111NL.FH11](https://img.yumpu.com/45232555/1/184x260/eng-perseus-winnmobile-v2-1111nlfh11.jpg?quality=85)