Untersuchungen zu nutzerbezogenen und technischen Aspekten beim
Untersuchungen zu nutzerbezogenen und technischen Aspekten beim
Untersuchungen zu nutzerbezogenen und technischen Aspekten beim

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
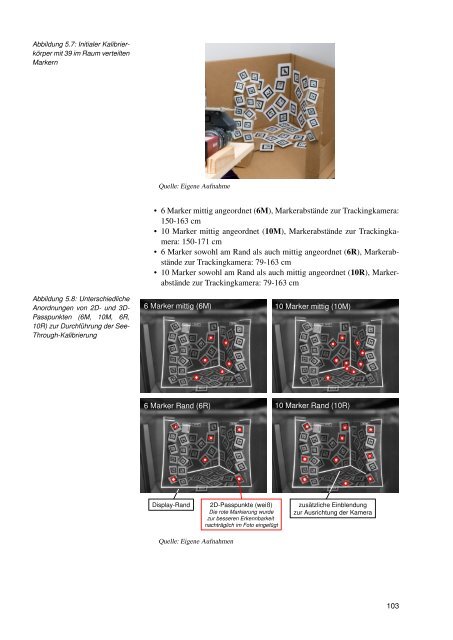
Abbildung 5.7: Initialer Kalibrierkörper<br />
mit 39 im Raum verteilten<br />
Markern<br />
Abbildung 5.8: Unterschiedliche<br />
Anordnungen von 2D- <strong>und</strong> 3D-<br />
Passpunkten (6M, 10M, 6R,<br />
10R) <strong>zu</strong>r Durchführung der See-<br />
Through-Kalibrierung<br />
Quelle: Eigene Aufnahme<br />
• 6 Marker mittig angeordnet (6M), Markerabstände <strong>zu</strong>r Trackingkamera:<br />
150-163 cm<br />
• 10 Marker mittig angeordnet (10M), Markerabstände <strong>zu</strong>r Trackingkamera:<br />
150-171 cm<br />
• 6 Marker sowohl am Rand als auch mittig angeordnet (6R), Markerabstände<br />
<strong>zu</strong>r Trackingkamera: 79-163 cm<br />
• 10 Marker sowohl am Rand als auch mittig angeordnet (10R), Markerabstände<br />
<strong>zu</strong>r Trackingkamera: 79-163 cm<br />
6 Marker mittig (6M) 10 Marker mittig (10M)<br />
6 Marker Rand (6R) 10 Marker Rand (10R)<br />
Display-Rand 2D-Passpunkte (weiß)<br />
Die rote Markierung wurde<br />
<strong>zu</strong>r besseren Erkennbarkeit<br />
nachträglich im Foto eingefügt<br />
Quelle: Eigene Aufnahmen<br />
<strong>zu</strong>sätzliche Einblendung<br />
<strong>zu</strong>r Ausrichtung der Kamera<br />
103