

Epson Roboter
Epson Roboter
Epson Roboter

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
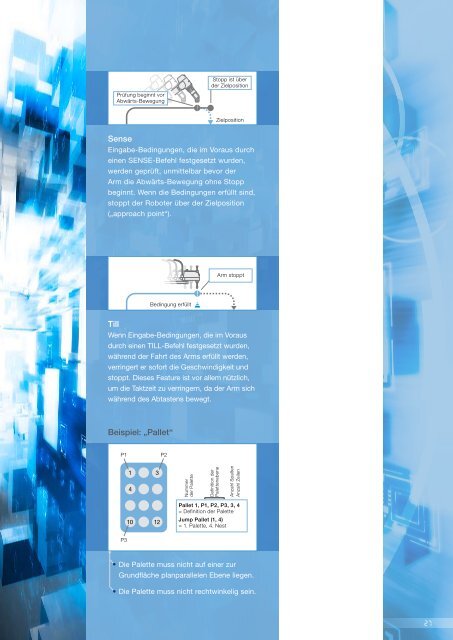
Prüfung beginnt vor<br />
Abwärts-Bewegung<br />
Sense<br />
Eingabe-Bedingungen, die im Voraus durch<br />
einen SENSE-Befehl festgesetzt wurden,<br />
werden geprüft, unmittelbar bevor der<br />
Arm die Abwärts-Bewegung ohne Stopp<br />
beginnt. Wenn die Bedingungen erfüllt sind,<br />
stoppt der <strong>Roboter</strong> über der Zielposition<br />
(„approach point“).<br />
Till<br />
Wenn Eingabe-Bedingungen, 1 3 die im Voraus<br />
durch einen TILL-Befehl festgesetzt wurden,<br />
während der Fahrt 4des<br />
Arms erfüllt werden,<br />
verringert er sofort die Geschwindigkeit und<br />
stoppt. Dieses Feature ist vor allem nützlich,<br />
um die Taktzeit zu verringern, da der Arm sich<br />
10 12<br />
während des Abtastens bewegt.<br />
1<br />
4<br />
Beispiel: „Pallet“<br />
P1 P2<br />
P3<br />
1<br />
4<br />
10<br />
Bedingung erfüllt<br />
3<br />
12<br />
10<br />
Nummer<br />
der Palette<br />
3<br />
12<br />
Stopp ist über<br />
der Zielposition<br />
Definition der<br />
Palettenebene<br />
Zielposition<br />
Arm stoppt<br />
Pallet 1, P1, P2, P3, 3, 4<br />
= Definition der Palette<br />
Jump Pallet (1, 4)<br />
= 1. Palette, 4. Nest<br />
Anzahl Spalten<br />
Anzahl Zeilen<br />
Die Palette muss nicht auf einer zur<br />
Grundfläche planparallelen Ebene liegen.<br />
Die Palette muss nicht rechtwinkelig sein.













