

Epson Roboter
Epson Roboter
Epson Roboter

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
•<br />
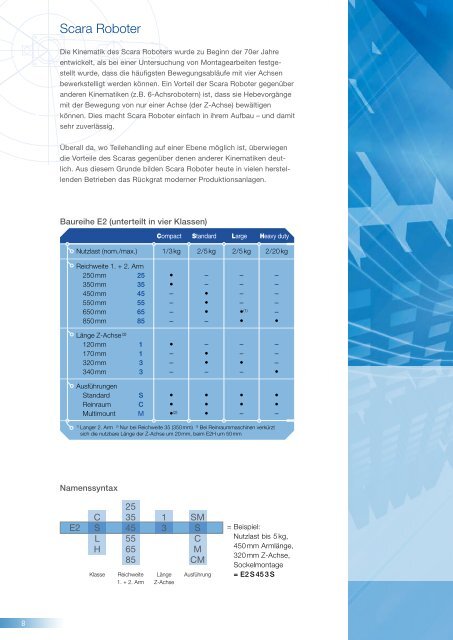
Scara <strong>Roboter</strong><br />
Die Kinematik des Scara <strong>Roboter</strong>s wurde zu Beginn der 70er Jahre<br />
entwickelt, als bei einer Untersuchung von Montagearbeiten festge-<br />
stellt wurde, dass die häufigsten Bewegungsabläufe mit vier Achsen<br />
bewerkstelligt werden können. Ein Vorteil der Scara <strong>Roboter</strong> gegenüber<br />
anderen Kinematiken (z.B. 6-Achsrobotern) ist, dass sie Hebevorgänge<br />
mit der Bewegung von nur einer Achse (der Z-Achse) bewältigen<br />
können. Dies macht Scara <strong>Roboter</strong> einfach in ihrem Aufbau – und damit<br />
sehr zuverlässig.<br />
Überall da, wo Teilehandling auf einer Ebene möglich ist, überwiegen<br />
die Vorteile des Scaras gegenüber denen anderer Kinematiken deut-<br />
lich. Aus diesem Grunde bilden Scara <strong>Roboter</strong> heute in vielen herstel-<br />
lenden Betrieben das Rückgrat moderner Produktionsanlagen.<br />
Baureihe E2 (unterteilt in vier Klassen)<br />
Compact Standard Large Heavy duty<br />
Nutzlast (nom./max.) 1 / 3 kg 2 / 5 kg 2 / 5 kg 2 / 20 kg<br />
Reichweite 1. + 2. Arm<br />
250 mm 25<br />
350 mm 35<br />
450 mm 45<br />
550 mm 55<br />
650 mm 65<br />
850 mm 85<br />
Länge Z-Achse ( ³ )<br />
120 mm 1<br />
170 mm 1<br />
320 mm 3<br />
340 mm 3<br />
Ausführungen<br />
Standard S<br />
Reinraum C<br />
Multimount M<br />
•<br />
•<br />
–<br />
–<br />
–<br />
–<br />
•<br />
–<br />
–<br />
–<br />
•<br />
•<br />
• ( ² )<br />
–<br />
–<br />
•<br />
•<br />
•<br />
–<br />
–<br />
•<br />
•<br />
–<br />
–<br />
–<br />
–<br />
–<br />
• (1)<br />
•<br />
1) Langer 2. Arm 2) Nur bei Reichweite 35 (350 mm) 3) Bei Reinraummaschinen verkürzt<br />
sich die nutzbare Länge der Z-Achse um 20 mm, beim E2H um 50 mm<br />
Namenssyntax<br />
E2<br />
C<br />
S<br />
L<br />
H<br />
25<br />
35<br />
45<br />
55<br />
65<br />
85<br />
Klasse Reichweite<br />
1. + 2. Arm<br />
1<br />
3<br />
Länge<br />
Z-Achse<br />
SM<br />
S<br />
C<br />
M<br />
CM<br />
•<br />
•<br />
•<br />
Ausführung<br />
–<br />
–<br />
•<br />
–<br />
•<br />
•<br />
–<br />
–<br />
–<br />
–<br />
–<br />
–<br />
•<br />
–<br />
–<br />
–<br />
•<br />
•<br />
•<br />
–<br />
= Beispiel:<br />
Nutzlast bis 5 kg,<br />
450 mm Armlänge,<br />
320 mm Z-Achse,<br />
Sockelmontage<br />
= E2 S 45 3 S













