

Epson Roboter
Epson Roboter
Epson Roboter

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
¢<br />
Gegenüberstellung der<br />
<strong>Epson</strong> <strong>Roboter</strong>kinematiken<br />
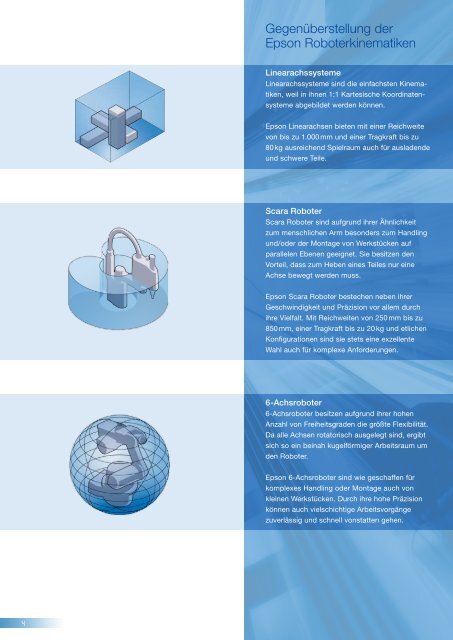
Linearachssysteme<br />
Linearachssysteme sind die einfachsten Kinema-<br />
tiken, weil in ihnen 1:1 Kartesische Koordinaten-<br />
systeme abgebildet werden können.<br />
<strong>Epson</strong> Linearachsen bieten mit einer Reichweite<br />
von bis zu 1.000 mm und einer Tragkraft bis zu<br />
80 kg ausreichend Spielraum auch für ausladende<br />
und schwere Teile.<br />
Scara <strong>Roboter</strong><br />
Scara <strong>Roboter</strong> sind aufgrund ihrer Ähnlichkeit<br />
zum menschlichen Arm besonders zum Handling<br />
und/oder der Montage von Werkstücken auf<br />
parallelen Ebenen geeignet. Sie besitzen den<br />
Vorteil, dass zum Heben eines Teiles nur eine<br />
Achse bewegt werden muss.<br />
<strong>Epson</strong> Scara <strong>Roboter</strong> bestechen neben ihrer<br />
Geschwindigkeit und Präzision vor allem durch<br />
ihre Vielfalt. Mit Reichweiten von 250 mm bis zu<br />
850 mm, einer Tragkraft bis zu 20 kg und etlichen<br />
Konfigurationen sind sie stets eine exzellente<br />
Wahl auch für komplexe Anforderungen.<br />
6-Achsroboter<br />
6-Achsroboter besitzen aufgrund ihrer hohen<br />
Anzahl von Freiheitsgraden die größte Flexibilität.<br />
Da alle Achsen rotatorisch ausgelegt sind, ergibt<br />
sich so ein beinah kugelförmiger Arbeitsraum um<br />
den <strong>Roboter</strong>.<br />
<strong>Epson</strong> 6-Achsroboter sind wie geschaffen für<br />
komplexes Handling oder Montage auch von<br />
kleinen Werkstücken. Durch ihre hohe Präzision<br />
können auch vielschichtige Arbeitsvorgänge<br />
zuverlässig und schnell vonstatten gehen.













