

Snap-Fit Joints for Plastics - A Design Guide - MIT
Snap-Fit Joints for Plastics - A Design Guide - MIT
Snap-Fit Joints for Plastics - A Design Guide - MIT

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Torsion <strong>Snap</strong> <strong>Joints</strong> C<br />
Deflection <strong>for</strong>ce<br />
A <strong>for</strong>ce P is required to deflect the lever arm<br />
by the amount y (1,2). The deflection <strong>for</strong>ce can<br />
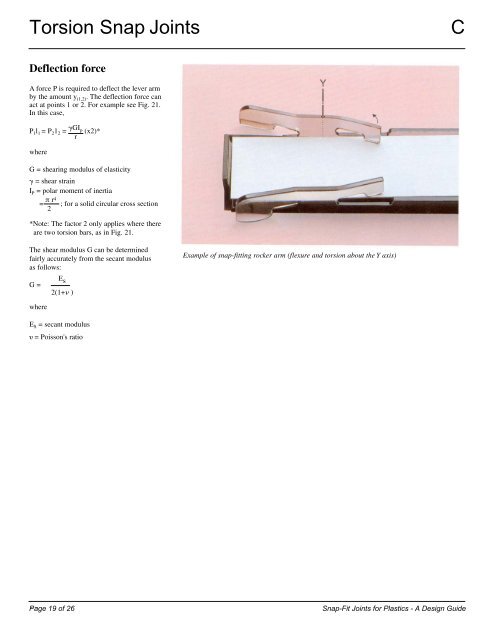
act at points 1 or 2. For example see Fig. 21.<br />
In this case,<br />
P 1l 1 =P 21 2 = �GI p (x2)*<br />
r<br />
where<br />
G = shearing modulus of elasticity<br />
� = shear strain<br />
IP = polar moment of inertia<br />
= � r4<br />
; <strong>for</strong> a solid circular cross section<br />
2<br />
*Note: The factor 2 only applies where there<br />
are two torsion bars, as in Fig. 21.<br />
The shear modulus G can be determined<br />
fairly accurately from the secant modulus<br />
as follows:<br />
G=<br />
where<br />
20<br />
Es 2(1+� )<br />
ES = secant modulus<br />
� = Poisson's ratio<br />
Example of snap-fitting rocker arm (flexure and torsion about the Y axis)<br />
Page 19 of 26 <strong>Snap</strong>-<strong>Fit</strong> <strong>Joints</strong> <strong>for</strong> <strong>Plastics</strong> - A <strong>Design</strong> <strong>Guide</strong>


