FORWARD KINEMATICS: THE DENAVIT-HARTENBERG ...
FORWARD KINEMATICS: THE DENAVIT-HARTENBERG ...
FORWARD KINEMATICS: THE DENAVIT-HARTENBERG ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
88CHAPTER 3. <strong>FORWARD</strong> <strong>KINEMATICS</strong>: <strong>THE</strong> <strong>DENAVIT</strong>-<strong>HARTENBERG</strong> CONVENTION<br />
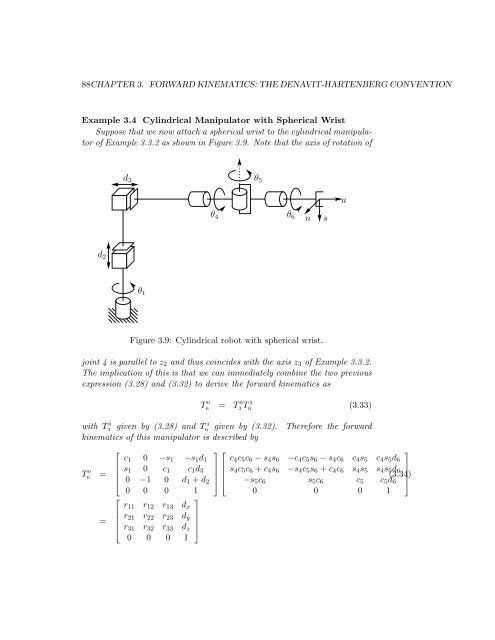
Example 3.4 Cylindrical Manipulator with Spherical Wrist<br />
Suppose that we now attach a spherical wrist to the cylindrical manipulator<br />
of Example 3.3.2 as shown in Figure 3.9. Note that the axis of rotation of<br />
d2<br />
d3<br />
θ1<br />
θ5<br />
θ4 θ6 n s<br />
Figure 3.9: Cylindrical robot with spherical wrist.<br />
joint 4 is parallel to z2 and thus coincides with the axis z3 of Example 3.3.2.<br />
The implication of this is that we can immediately combine the two previous<br />
expression (3.28) and (3.32) to derive the forward kinematics as<br />
T 0<br />
6 = T 0<br />
3 T 3<br />
6<br />
a<br />
(3.33)<br />
with T 0<br />
3 given by (3.28) and T 3<br />
6 given by (3.32). Therefore the forward<br />
kinematics of this manipulator is described by<br />
T 0<br />
6 =<br />
=<br />
⎡<br />
c1<br />
⎢ s1<br />
⎢<br />
⎣ 0<br />
0<br />
0<br />
−1<br />
−s1<br />
c1<br />
0<br />
⎤ ⎡<br />
−s1d1 c4c5c6 − s4s6<br />
⎥ ⎢<br />
c1d3 ⎥ ⎢ s4c5c6 + c4s6<br />
⎥ ⎢<br />
d1 + d2 ⎦ ⎣ −s5c6<br />
−c4c5s6 − s4c6<br />
−s4c5s6 + c4c6<br />
s5c6<br />
c4s5<br />
s4s5<br />
c5<br />
⎤<br />
c4s5d6<br />
⎥<br />
s4s5d6 ⎥<br />
(3.34) ⎥<br />
c5d6 ⎦<br />
0<br />
⎡<br />
0 0 1<br />
⎤<br />
0 0 0 1<br />
r11<br />
⎢ r21<br />
⎢<br />
⎣ r31<br />
r12<br />
r22<br />
r32<br />
r13<br />
r23<br />
r33<br />
dx<br />
dy<br />
dz<br />
⎥<br />
⎦<br />
0 0 0 1