

AC SERVO SYSTEM - SmartDrive
AC SERVO SYSTEM - SmartDrive
AC SERVO SYSTEM - SmartDrive

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
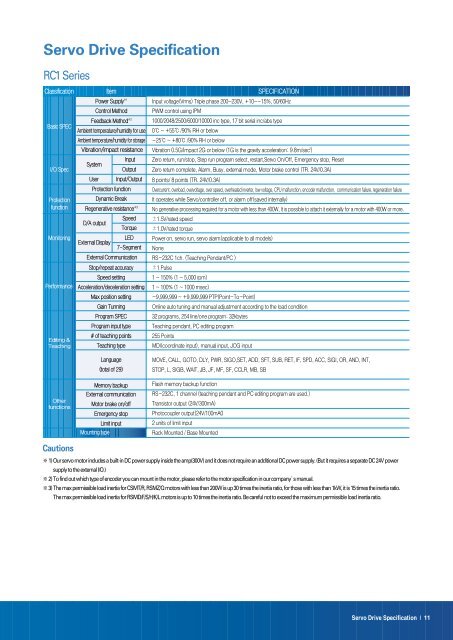
Servo Drive Specification<br />
RC1 Series<br />
Classification<br />
Item<br />
SPECIFICATION<br />
Power Supply<br />
Basic SPEC<br />
※1<br />
Control Method<br />
Feedback Method ※2<br />
Ambient temperature/humidity for use<br />
Ambient temperature/humidity for storage<br />
Vibration/impact resistance<br />
User<br />
Protection function<br />
Dynamic Break<br />
Regenerative resistance<br />
D/A output<br />
Speed<br />
Torque<br />
External Display<br />
LED<br />
7-Segment<br />
External Communication<br />
※3<br />
PWM control using IPM<br />
1000/2048/2500/6000/10000 inc type, 17 bit serial inc/abs type<br />
0℃ ~ +55℃ /90% RH or below<br />
-25℃ ~ +80℃ /90% RH or below<br />
Vibration 0.5G/Impact 2G or below (1G is the gravity acceleration: 9.8m/sec<br />
I/O Spec<br />
System<br />
Input<br />
Output<br />
Input/Output<br />
Protection<br />
function<br />
±1.5V/rated speed<br />
±1.0V/rated torque<br />
Monitoring<br />
Power on, servo run, servo alarm(applicable to all models)<br />
None<br />
RS-232C 1ch. (Teaching Pendant/PC )<br />
Stop/repeat accuracy ±1 Pulse<br />
Speed setting<br />
1 ~ 150% (1 ~ 5,000 rpm)<br />
Performance Acceleration/deceleration setting 1 ~ 100% (1 ~ 1000 msec)<br />
Max position setting -9,999,999 ~ +9,999,999 PTP(Point-To-Point)<br />
Gain Tunning<br />
Online auto tuning and manual adjustment according to the load condition<br />
Program SPEC 32 programs, 254 line/one program: 32kbytes<br />
Program input type Teaching pendant, PC editing program<br />
Editing &<br />
Teaching<br />
# of teaching points<br />
Teaching type<br />
255 Points<br />
MDI(coordinate input), manual input, JOG input<br />
2 Input voltage(Vrms) Triple phase 200~230V, +10~-15%, 50/60Hz<br />
)<br />
Zero return, run/stop, Step run program select, restart,Servo On/Off, Emergency stop, Reset<br />
Zero return complete, Alarm, Busy, external mode, Motor brake control (TR. 24V/0.3A)<br />
8 points/ 8 points (TR. 24V/0.3A)<br />
Overcurrent, overload, overvoltage, over speed, overheated inverter, low voltage, CPU malfunction, encoder malfunction, communication failure, regeneration failure<br />
It operates while Servo/controller off, or alarm off(saved internally)<br />
No generative processing required for a motor with less than 400W, It is possible to attach it externally for a motor with 400W or more.<br />
Other<br />
functions<br />
Cautions<br />
Language<br />
(total of 29)<br />
Memory backup<br />
External communication<br />
Motor brake on/off<br />
Emergency stop<br />
Limit input<br />
Mounting type<br />
MOVE, CALL, GOTO, DLY, PWR, SIGO,SET, ADD, SFT, SUB, RET, IF, SPD, <strong>AC</strong>C, SIGI, OR, AND, INT,<br />
STOP, L, SIGB, WAIT, JB, JF, MF, SF, CCLR, MB, SB<br />
Flash memory backup function<br />
RS-232C, 1 channel (teaching pendant and PC editing program are used.)<br />
Transistor output (24V/300mA)<br />
Photocoupler output(24V/100mA0<br />
2 units of limit input<br />
Rack Mounted / Base Mounted<br />
※1) Our servo motor includes a built-in DC power supply inside the amp(300V) and it does not require an additional DC power supply. (But it requires a separate DC 24V power<br />
supply to the external I/O.)<br />
※2) To find out which type of encoder you can mount in the motor, please refer to the motor specification in our company’s manual.<br />
※3) The max permissible load inertia for CSMT/R, RSMZ/Q motors with less than 200W is up 30 times the inertia ratio, for those with less than 1kW, it is 15 times the inertia ratio.<br />
The max permissible load inertia for RSMD/F/S/H/K/L motors is up to 10 times the inertia ratio. Be careful not to exceed the maximum permissible load inertia ratio.<br />
Servo Drive Specification I 11
