

Pioneer 3™ Pioneer 2™ H8- Series Operations Manual
Pioneer 3™ Pioneer 2™ H8- Series Operations Manual
Pioneer 3™ Pioneer 2™ H8- Series Operations Manual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ActivMedia Robotics Operating System<br />
With AROS versions 1.3 and later, many of the controller’s operating parameters return to<br />
their FLASH-based default values upon disconnection with the client. 18 For example, if<br />
the FLASH default for the maximum velocity is 1000 millimeters per second, and your<br />
client uses the SETV command #6 to reset the maximum velocity to 500 millimeters per<br />
second, the maximum velocity automatically will revert back to 1000 after your client<br />
disconnects and then reconnects for a subsequent session.<br />
MOTION COMMANDS<br />
The AROS motor-control servers accept several different client-motion commands of two<br />
mutually exclusive types: either independent-wheel or platform translational/rotational<br />
movements. The AROS servers automatically abandon any translational or rotational<br />
setpoints and switch to independent wheel-velocity controls when your client issues the<br />
independent-wheel VEL2 command #32, and vice versa.<br />
Note that once connected, ActivMedia robots’ motors are disabled, regardless of their<br />
state when last connected. Accordingly, you must either enable the motors manually<br />
(white MOTORS button on the User Control Panel) or send the motors ENABLE client<br />
command #4 with the argument value of one. 19 Monitor the status of the motors with bit<br />
0 of the Flags integer in the standard SIP.<br />
When in independent-wheel velocity mode (VEL2), the robot’s motion-control servers do<br />
their best to maintain precise wheel velocities. In practice, wheel slippage and uneven<br />
terrain will cause the robot to change heading, which your client must detect and<br />
compensate. When in translational/rotational (TR) motion control mode<br />
(recommended), your robot’s servers work to maintain both platform speed and<br />
heading.<br />
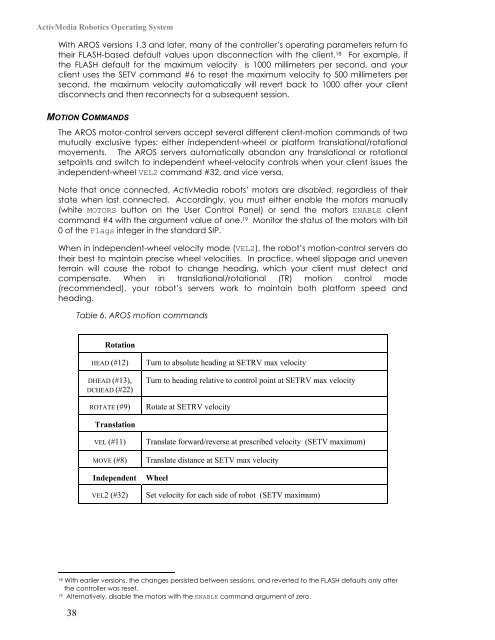
Table 6. AROS motion commands<br />
Rotation<br />
HEAD (#12) Turn to absolute heading at SETRV max velocity<br />
DHEAD (#13),<br />
DCHEAD (#22)<br />
Turn to heading relative to control point at SETRV max velocity<br />
ROTATE (#9) Rotate at SETRV velocity<br />
Translation<br />
VEL (#11) Translate forward/reverse at prescribed velocity (SETV maximum)<br />
MOVE (#8) Translate distance at SETV max velocity<br />
Independent Wheel<br />
VEL2 (#32) Set velocity for each side of robot (SETV maximum)<br />
18 With earlier versions, the changes persisted between sessions, and reverted to the FLASH defaults only after<br />
the controller was reset.<br />
19 Alternatively, disable the motors with the ENABLE command argument of zero.<br />
38














