

Pioneer 3™ Pioneer 2™ H8- Series Operations Manual
Pioneer 3™ Pioneer 2™ H8- Series Operations Manual
Pioneer 3™ Pioneer 2™ H8- Series Operations Manual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ActivMedia Robotics Operating System<br />
AUX port communications<br />
AROS provides two-way communications through the HOST client-server communication<br />
port to and through two auxillary serial ports on the microcontroller, AUX1 and AUX2. Use<br />
the TTY2 command number 42 with a string argument to have that string sent out the<br />
AUX1 port to the attached serial device, such as a robotic camera. Similarly, use the<br />
TTY3 command number 66 to send a string argument to the AUX2 port.<br />
AROS also maintains two circular buffers for incoming serial data from the AUX1 and<br />
AUX2 ports. On request, AROS sends successive portions of the buffers to your client via<br />
the HOST port in the respective SERAUXpac (type = 176; 0xB0) and SERAUX2pac (type =<br />
184; 0xB8) SIPs. Use the GETAUX command 43 for AUX1 or GETAUX2 command number 67<br />
for AUX2. Use the integer argument value of zero to flush the contents of the respective<br />
buffer. Use an argument value of up to 253 bytes to have AROS wait to collect the<br />
requested number of incoming AUX-port serial bytes and them send them in the<br />
respective SERAUXpac or SERAUX2pac SIP.<br />
Encoder packets<br />
Issue the ENCODER command 19 with an argument of one for a single, or with an<br />
argument value of two or more for a continuous stream of ENCODERpac (type 144; 0x90)<br />
SIPs. Discontinue the packets with the ENCODER command 19 with an argument of zero.<br />
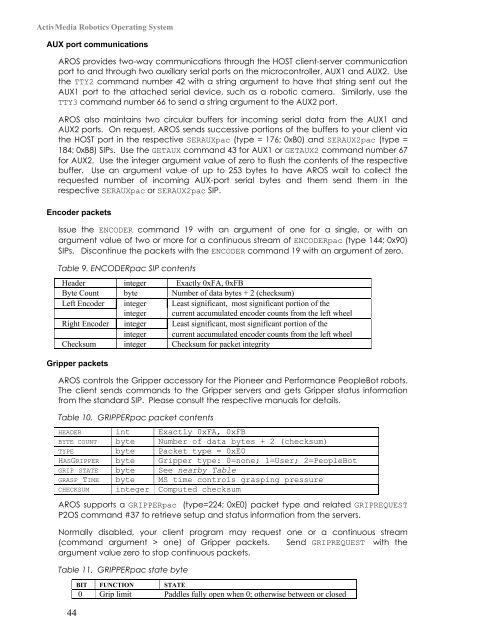
Table 9. ENCODERpac SIP contents<br />
Header integer Exactly 0xFA, 0xFB<br />
Byte Count byte Number of data bytes + 2 (checksum)<br />
Left Encoder integer Least significant, most significant portion of the<br />
integer current accumulated encoder counts from the left wheel<br />
Right Encoder integer Least significant, most significant portion of the<br />
integer current accumulated encoder counts from the left wheel<br />
Checksum integer Checksum for packet integrity<br />
Gripper packets<br />
AROS controls the Gripper accessory for the <strong>Pioneer</strong> and Performance PeopleBot robots.<br />
The client sends commands to the Gripper servers and gets Gripper status information<br />
from the standard SIP. Please consult the respective manuals for details.<br />
Table 10. GRIPPERpac packet contents<br />
HEADER int Exactly 0xFA, 0xFB<br />
BYTE COUNT byte Number of data bytes + 2 (checksum)<br />
TYPE byte Packet type = 0xE0<br />
HASGRIPPER byte Gripper type: 0=none; 1=User; 2=PeopleBot<br />
GRIP_STATE byte See nearby Table<br />
GRASP_TIME byte MS time controls grasping pressure<br />
CHECKSUM integer Computed checksum<br />
AROS supports a GRIPPERpac (type=224; 0xE0) packet type and related GRIPREQUEST<br />
P2OS command #37 to retrieve setup and status information from the servers.<br />
Normally disabled, your client program may request one or a continuous stream<br />
(command argument > one) of Gripper packets. Send GRIPREQUEST with the<br />
argument value zero to stop continuous packets.<br />
Table 11. GRIPPERpac state byte<br />
44<br />
BIT FUNCTION STATE<br />
0 Grip limit Paddles fully open when 0; otherwise between or closed














