

Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.3 Using augmented reality to interact with an<br />
autonomous mobile platform<br />
The work of Giesler et al. [21] presents an AR-based, speech-based<br />
technique to quickly and intuitively program paths for a mobile robot<br />
in a wide environment.<br />
The operator who programs the robot needs a HMD and a tool<br />
(“magic wand”), both of which have to be tracked around the envi-<br />
ronment where the paths will be set up. The operator may define and<br />
view paths in form of nodes, which correspond to points on the ground,<br />
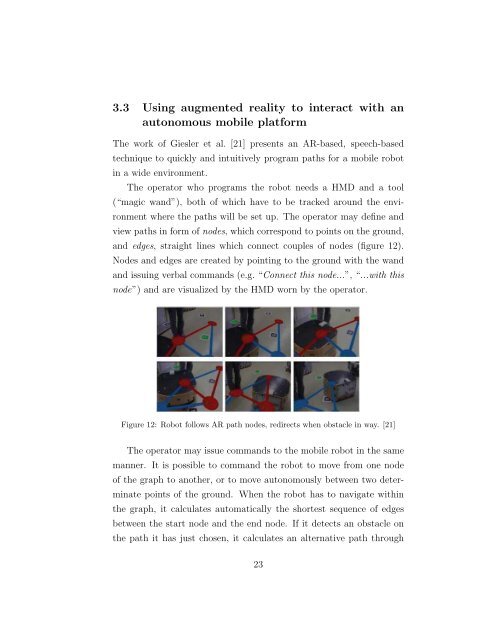
and edges, straight lines which connect couples of nodes (figure 12).<br />
Nodes and edges are created by pointing to the ground with the wand<br />
and issuing verbal commands (e.g. “Connect this node...”, “...with this<br />
node”) and are visualized by the HMD worn by the operator.<br />
Figure 12: Robot follows AR path nodes, redirects when obstacle in way. [21]<br />
The operator may issue commands to the mobile robot in the same<br />
manner. It is possible to command the robot to move from one node<br />
of the graph to another, or to move autonomously between two deter-<br />
minate points of the ground. When the robot has to navigate within<br />
the graph, it calculates automatically the shortest sequence of edges<br />
between the start node and the end node. If it detects an obstacle on<br />
the path it has just chosen, it calculates an alternative path through<br />
23

