

Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4.3 Depth-enhanced mobile robot teleguide based<br />
on laser images<br />
The work of Livatino et al. [60] performs a systematical evaluation<br />
analogue to the one described in [59]. Though, the evaluated teleguide<br />
interface displays synthetic images generated by laser scans instead than<br />
real camera images. In this telerobotic system, laser data is processed<br />
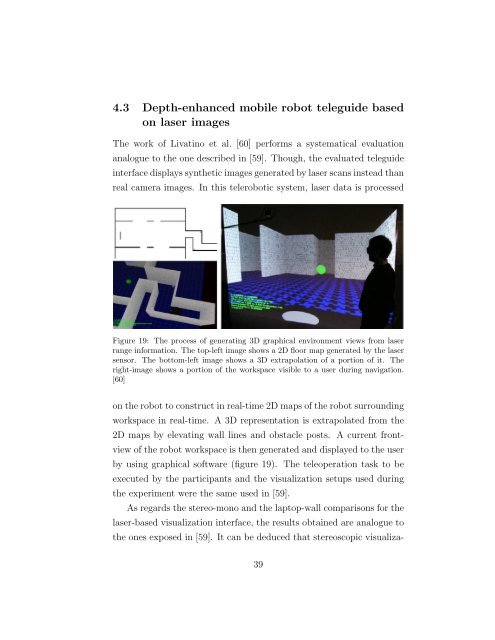
Figure 19: The process of generating 3D graphical environment views from laser<br />
range information. The top-left image shows a 2D floor map generated by the laser<br />
sensor. The bottom-left image shows a 3D extrapolation of a portion of it. The<br />
right-image shows a portion of the workspace visible to a user during navigation.<br />
[60]<br />
on the robot to construct in real-time 2D maps of the robot surrounding<br />
workspace in real-time. A 3D representation is extrapolated from the<br />
2D maps by elevating wall lines and obstacle posts. A current front-<br />
view of the robot workspace is then generated and displayed to the user<br />
by using graphical software (figure 19). The teleoperation task to be<br />
executed by the participants and the visualization setups used during<br />
the experiment were the same used in [59].<br />
As regards the stereo-mono and the laptop-wall comparisons for the<br />
laser-based visualization interface, the results obtained are analogue to<br />
the ones exposed in [59]. It can be deduced that stereoscopic visualiza-<br />
39

