

Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.6 Egocentric and exocentric teleoperation interface<br />
using real-time, 3D video projection<br />
The paper of Ferland et al. [25] presents an augmented-virtuality-based<br />
interface for mobile robot teleoperation. As the one described in [26],<br />
it displays data from range and video sensors. In addition, it makes use<br />
of different projection methods of the video image in order to increase<br />
the quality of the information provided.<br />
Sensors used consist in a laser range sensor and a couple of stereo<br />
cameras. The laser is used to build a global 2D map of the environ-<br />
ment. The operator interface displays the map as a 3D environment,<br />
visualizing the obstacles detected by the laser as fixed-height walls. A<br />
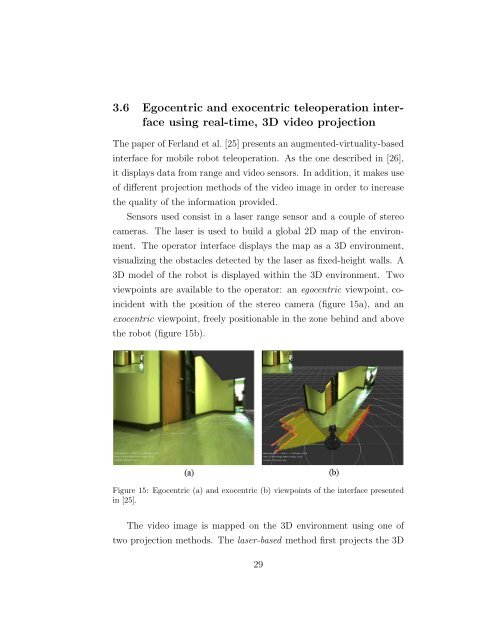
3D model of the robot is displayed within the 3D environment. Two<br />
viewpoints are available to the operator: an egocentric viewpoint, co-<br />
incident with the position of the stereo camera (figure 15a), and an<br />
exocentric viewpoint, freely positionable in the zone behind and above<br />
the robot (figure 15b).<br />
Figure 15: Egocentric (a) and exocentric (b) viewpoints of the interface presented<br />
in [25].<br />
The video image is mapped on the 3D environment using one of<br />
two projection methods. The laser-based method first projects the 3D<br />
29

