

Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)
Scarica (PDF – 6.19 MB)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.5 Ecological interfaces for improving mobile robot<br />
teleoperation<br />
The work of Nielsen et al. [26] describes an interface for mobile robot<br />
teleoperation based on ecological [56] interface design and augmented<br />
virtuality. Different versions of the same interface are compared, show-<br />
ing that integration of sensor data gives better results for navigation<br />
than displaying results separately.<br />
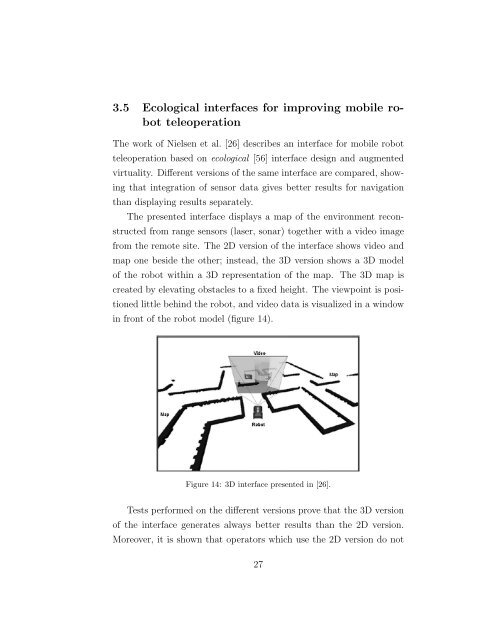
The presented interface displays a map of the environment recon-<br />
structed from range sensors (laser, sonar) together with a video image<br />
from the remote site. The 2D version of the interface shows video and<br />
map one beside the other; instead, the 3D version shows a 3D model<br />
of the robot within a 3D representation of the map. The 3D map is<br />
created by elevating obstacles to a fixed height. The viewpoint is posi-<br />
tioned little behind the robot, and video data is visualized in a window<br />
in front of the robot model (figure 14).<br />
Figure 14: 3D interface presented in [26].<br />
Tests performed on the different versions prove that the 3D version<br />
of the interface generates always better results than the 2D version.<br />
Moreover, it is shown that operators which use the 2D version do not<br />
27

