Lab 8 - Claymore - Grand Valley State University
Lab 8 - Claymore - Grand Valley State University
Lab 8 - Claymore - Grand Valley State University

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Grand</strong> <strong>Valley</strong> <strong>State</strong> <strong>University</strong><br />
Padnos School of Engineering<br />
EGR 345: Dynamic Systems Modeling and Control<br />
<strong>Lab</strong> Instructor: Dr. Andrew Blauch<br />
Instructor: Dr. Hugh Jack<br />
<strong>Lab</strong>oratory Exercise 8<br />
Title: Modeling Brushed DC Motors<br />
Author:<br />
Daniel D. Gage<br />
Date: December 2, 2004
Purpose:<br />
The purpose of this laboratory activity was to develop a differential equation that models<br />
brushed DC motors.<br />
Background:<br />
Applied voltage and the resulting current cause torque between the rotor and the stator in<br />
DC motors. This torque causes the rotor to accelerate. Different voltages will result in<br />
different final angular velocities. This is due to friction in the motor. As shown in Figure<br />
1, the relationship between torque and steady-state angular velocity is a straight line. As<br />
the voltage/current increase the torque and steady-state and angular velocity increase.<br />
Theory:<br />
Figure 1: Torque vs. Angular velocity ∗<br />
In order to develop the equations for the basic motor model, an equivalent circuit and a<br />
diagram showing the inertia components of the motor must be developed. These are<br />
shown in Figure 2. The circuit shows the resistance of the motor and the dependent<br />
voltage source; in this case it will be a tachometer. The right hand side shows the inertia<br />
components. The motor rotor causes the rotational inertia J1 and the attached load causes<br />
rotational inertia J2.<br />
Figure 2: Basic Motor Model *<br />
In the motor the current in the wire will push against the generated magnetic field, this<br />
∗ Jack, Hugh “Dynamics Systems Modeling and Control”, August 2004 Rev 2.5<br />
2
esults in a generated torque that is proportional to the current.<br />
T m<br />
= K ⋅ I<br />
The power of the motor must be considered.<br />
Tm<br />
∴ I =<br />
K<br />
P = Vm<br />
⋅ I = T ⋅ω<br />
= K ⋅ I ⋅ω<br />
∴ = K ⋅ω<br />
Next, the moments for the rotating masses must be summed.<br />
⎛ d ⎞<br />
∑ M = T − Tload<br />
= J ⎜ ⎟ ⋅ω<br />
⎝ dt ⎠<br />
m m<br />
load<br />
V m<br />
⎛ d ⎞<br />
∴T = J⎜<br />
⎟ ⋅ω<br />
+ T<br />
⎝ dt ⎠<br />
These equations can be manipulated to achieve the first order differential equation model<br />
of a motor.<br />
Equipment:<br />
V<br />
I =<br />
s −<br />
R<br />
V<br />
m<br />
Tm Vs<br />
− K ⋅ω<br />
∴ =<br />
K R<br />
⎛<br />
J⎜<br />
∴<br />
⎝<br />
d<br />
dt<br />
⎞<br />
⎟ ⋅ω<br />
+ T<br />
⎠<br />
K<br />
load<br />
V<br />
=<br />
2<br />
⎛ ⎞ ⎛ K ⎞<br />
∴⎜<br />
⎟ω<br />
+ ω ⋅ = V<br />
dt ⎜<br />
J R ⎟<br />
⎝ ⎠ ⎝ ⋅ ⎠<br />
s<br />
− K ⋅ω<br />
R<br />
⎛ K ⎞ T<br />
⋅⎜<br />
⎟ −<br />
⎝ J ⋅ R ⎠ J<br />
d load<br />
s<br />
• Laptop with WinAVR compiler<br />
• AT Mega32 microcontroller with L293 motor driver<br />
• 1 DC motor<br />
• 1 DC tachometer<br />
• 1 Digital Multi Meter<br />
• External power supply<br />
Procedure and Results:<br />
1. The differential equation was integrated to find an explicit function of speed as a<br />
function of time.<br />
⎛ K<br />
⎞<br />
⎛<br />
K<br />
⎞<br />
T<br />
2<br />
ω& + ω ⋅ ⎜<br />
J m<br />
⎟ = Vs<br />
⋅ ⎜ −<br />
J m R ⎟<br />
⋅<br />
load<br />
J m<br />
(1)<br />
⎝<br />
⎠<br />
⎝<br />
⎠<br />
3
Homogeneous:<br />
Therefore:<br />
Particular:<br />
Therefore:<br />
2 ⎛ K ⎞<br />
ω& + ω ⋅ ⎜<br />
⎟ = 0<br />
(2)<br />
⎝ J m ⎠<br />
t = e<br />
α<br />
ω (3)<br />
⋅t<br />
Let: ( )<br />
Homogeneous<br />
α⋅t<br />
( t)<br />
= α ⋅ e<br />
ω& (4)<br />
Homogeneous<br />
Substituting (3) and (4) into (2) yields:<br />
( t)<br />
⎛ K<br />
α + ⎜<br />
⎝<br />
2<br />
J m<br />
⎛<br />
∴α<br />
= − ⎜<br />
⎝<br />
Homogeneous<br />
⎞<br />
⎟ = 0<br />
⎠<br />
K 2<br />
J m<br />
⎟ ⎞<br />
⎠<br />
⎛ 2<br />
K ⎞<br />
−⎜<br />
⎟⋅t<br />
⎜ J ⎟<br />
⎝ m ⎠<br />
ω = C ⋅ e<br />
(5)<br />
Let: ( ) 2 C<br />
t Particular =<br />
1<br />
ω (6)<br />
( t)<br />
= 0<br />
ω& (7)<br />
Particular<br />
Substituting (6) and (7) into (1) yields:<br />
0 +<br />
∴ C<br />
⎛ K<br />
⎞<br />
K<br />
2<br />
s<br />
C ⋅ ⎜ Vs<br />
−<br />
J ⎟ = ⋅ ⎜<br />
m J m R ⎟<br />
2<br />
⋅<br />
2<br />
⎝<br />
⎠<br />
⎛<br />
⎝<br />
Vs<br />
Tload<br />
⋅ R<br />
= − 2<br />
K K<br />
Vs<br />
Tload<br />
⋅ R<br />
ω ( t)<br />
Particular = −<br />
(8)<br />
2<br />
K K<br />
Combining (5) and (8) yields:<br />
⎛ 2<br />
K ⎞<br />
−⎜<br />
⎟⋅t<br />
⎜ J ⎟ Vs<br />
Tload<br />
⋅ R<br />
⎝ m ⎠<br />
ω ( t)<br />
= C1<br />
⋅ e + −<br />
(9)<br />
2<br />
K K<br />
⎞<br />
⎠<br />
T<br />
load<br />
J<br />
m<br />
4
Solve for initial conditions:<br />
ω<br />
V<br />
K<br />
s load<br />
( ) = C + − = 0<br />
T<br />
0 1<br />
2<br />
Tload<br />
⋅ R Vs<br />
∴C = − 2<br />
K K<br />
K<br />
⋅ R<br />
1 (10)<br />
Substituting (10) into (9) yields:<br />
⎛ 2<br />
K ⎞<br />
−⎜<br />
⎟⋅t<br />
⎛ Tload<br />
⋅ R Vs<br />
⎞ ⎜ J ⎟ Vs<br />
Tload<br />
⋅ R<br />
⎝ m ⎠<br />
ω ( t)<br />
= ⎜ − ⎟ ⋅ e + −<br />
(11)<br />
2<br />
2<br />
⎝ K K ⎠ K K<br />
2. A plan was developed to measure motor parameters.<br />
R: A digital multimeter was used to measure resistance.<br />
K: The steady state response was used to attain K.<br />
2 ⎛ K ⎞<br />
ω ⎜<br />
⎟<br />
m ⋅ = V<br />
⎝ J m ⋅ R ⎠<br />
Vs<br />
∴ K =<br />
ω<br />
m<br />
s<br />
⎟ ⎛ K ⎞<br />
⋅ ⎜<br />
⎝ J m ⋅ R ⎠<br />
J: The time constant and K were used to attain J.<br />
J<br />
2<br />
K<br />
=<br />
R ⋅τ<br />
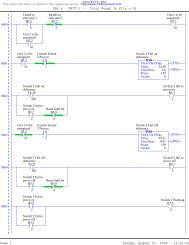
3. A program was written for the AT Mega32 that sets the PWM output and collects<br />
data for the tachometer speed. The user inputs an integer between 0 and 9, which<br />
sets the PWM output to a value between 0 and 255. The program begins to take<br />
analog voltage input from the tachometer every 10 ms. When the user presses “t”<br />
on the keyboard, the program generates a table that is displayed to the screen.<br />
This program also includes compensation for deadband in the motor. The<br />
program is shown in Appendix A.<br />
4. The resistance of the motor was measured.<br />
R = 9.4Ω<br />
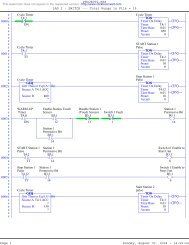
5. The motor and tachometer were wired to the AT Mega32 as shown in Figure 3.<br />
5
Figure 3: Wiring diagram for AT Mega32 driving a motor with tachometer feedback<br />
6. The deadband limits of the motor were measured using the program.<br />
c_kinetic_posistve = 0x06<br />
c_kinetic_negative = 0x12<br />
c_static_positive = 0x07<br />
c_static_negative = 0x08<br />
7. From a previous lab activity, a relationship between the tachometer voltage and<br />
the angular velocity was found to be:<br />
⎛ 51⋅ π ⎞<br />
ω = ⎜ ⎟ ⋅V<br />
⎝ 30 ⎠<br />
Also, the value of count must be converted to a voltage. This was accomplished<br />
as follows:<br />
V s<br />
= count ⋅<br />
5<br />
255<br />
8. Data was obtained for the values of count, V s , ω, K, τ, and J. The data is shown<br />
in Table 1. The angular velocity of the tachometer is shown in Appendix B.<br />
6
Discussion:<br />
Count s<br />
Table 1: Motor data<br />
⎛ rad ⎞<br />
ω ⎜ ⎟<br />
⎝ sec ⎠<br />
V (V)<br />
K τ (sec)<br />
2<br />
J ( Kg ⋅ m )<br />
28 0.55 515.38 0.00107 0.30 4.02E-07<br />
56 1.10 696.67 0.00158 0.50 5.29E-07<br />
84 1.65 766.09 0.00215 0.50 9.83E-07<br />
112 2.20 805.56 0.00273 0.75 1.05E-06<br />
140 2.75 821.87 0.00334 0.75 1.58E-06<br />
168 3.29 832.56 0.00396 0.80 2.08E-06<br />
196 3.84 841.16 0.00457 0.85 2.61E-06<br />
224 4.39 848.28 0.00518 1.05 2.72E-06<br />
252 4.94 863.12 0.00572 1.30 2.68E-06<br />
The theoretical speed was calculated using Eq (11) with T = 0 . The equations used<br />
were:<br />
For count = 28<br />
ω<br />
( t)<br />
= −<br />
For count = 56<br />
ω<br />
( t)<br />
= −<br />
For count = 84<br />
ω<br />
( t)<br />
= −<br />
For count = 112<br />
ω<br />
( t)<br />
For count = 140<br />
ω<br />
( t)<br />
0.<br />
55<br />
0.<br />
00107<br />
1.<br />
10<br />
0.<br />
00158<br />
1.<br />
65<br />
0.<br />
00215<br />
⋅ e<br />
⋅ e<br />
⋅ e<br />
2.<br />
20<br />
= − ⋅ e<br />
0.<br />
00273<br />
2.<br />
75<br />
= − ⋅ e<br />
0.<br />
00334<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
2<br />
0.<br />
00107<br />
−7<br />
4.<br />
02 10<br />
×<br />
2<br />
0.<br />
00158<br />
−7<br />
5.<br />
29 10<br />
×<br />
2<br />
0.<br />
00215<br />
−7<br />
9.<br />
83 10<br />
×<br />
2<br />
0.<br />
00273<br />
−6<br />
1.<br />
05 10<br />
×<br />
2<br />
0.<br />
00334<br />
−6<br />
1.<br />
58 10<br />
×<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
load<br />
0.<br />
55<br />
+<br />
0.<br />
00107<br />
1.<br />
10<br />
+<br />
0.<br />
00158<br />
1.<br />
65<br />
+<br />
0.<br />
00215<br />
2.<br />
20<br />
+<br />
0.<br />
00273<br />
2.<br />
75<br />
+<br />
0.<br />
00334<br />
7
For count = 168<br />
ω<br />
( t)<br />
= −<br />
For count = 196<br />
ω<br />
( t)<br />
= −<br />
For count = 224<br />
ω<br />
( t)<br />
= −<br />
For count = 252<br />
ω<br />
( t)<br />
= −<br />
3.<br />
29<br />
0.<br />
00396<br />
3.<br />
84<br />
0.<br />
00457<br />
4.<br />
39<br />
0.<br />
00518<br />
4.<br />
94<br />
0.<br />
00572<br />
⋅ e<br />
⋅ e<br />
⋅ e<br />
⋅ e<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
⎛<br />
−⎜<br />
⎜<br />
⎝<br />
2<br />
0.<br />
00396<br />
−6<br />
2.<br />
08 10<br />
×<br />
2<br />
0.<br />
00457<br />
−6<br />
2.<br />
61 10<br />
×<br />
2<br />
0.<br />
00518<br />
−6<br />
2.<br />
72 10<br />
×<br />
2<br />
0.<br />
00572<br />
−6<br />
2.<br />
68 10<br />
×<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
⎞<br />
⎟⋅t<br />
⎟<br />
⎠<br />
3.<br />
29<br />
+<br />
0.<br />
00396<br />
3.<br />
84<br />
+<br />
0.<br />
00457<br />
4.<br />
39<br />
+<br />
0.<br />
00518<br />
4.<br />
94<br />
+<br />
0.<br />
00572<br />
The theoretical data for the angular velocity of the tachometer is shown in Appendix C.<br />
The theoretical and experimental data for the various speeds were graphed. The graphs<br />
are shown in Figures 4 through 12.<br />
ω (rad/s)<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 1<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 4: Angular velocity (rad/sec) vs. Time (ms), with Count = 28<br />
8
ω (rad/s)<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 2<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 5: Angular velocity (rad/sec) vs. Time (ms), with Count = 56<br />
ω (rad/s)<br />
900.00<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 3<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretcial<br />
Figure 6: Angular velocity (rad/sec) vs. Time (ms), with Count = 84<br />
9
ω (rad/s)<br />
900.00<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 4<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 7: Angular velocity (rad/sec) vs. Time (ms), with Count = 112<br />
ω (rad/s)<br />
900.00<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 5<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 8: Angular velocity (rad/sec) vs. Time (ms), with Count = 140<br />
10
ω (rad/s)<br />
900.00<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 6<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 9: Angular velocity (rad/sec) vs. Time (ms), with Count = 168<br />
ω (rad/s)<br />
900.00<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 7<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 10: Angular velocity (rad/sec) vs. Time (ms), with Count = 196<br />
11
ω (rad/s)<br />
1000.00<br />
900.00<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 8<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 11: Angular velocity (rad/sec) vs. Time (ms), with Count = 224<br />
ω (rad/s)<br />
1000.00<br />
900.00<br />
800.00<br />
700.00<br />
600.00<br />
500.00<br />
400.00<br />
300.00<br />
200.00<br />
100.00<br />
Speed 9<br />
0.00<br />
0 200 400 600 800 1000 1200<br />
Time (ms)<br />
Experimental<br />
Theoretical<br />
Figure 12: Angular velocity (rad/sec) vs. Time (ms), with Count = 252<br />
12
To show the relationship between the applied voltage and angular acceleration, all nine<br />
experimental speeds were graphed on a single graph. This is shown in Figure 13.<br />
Conclusions:<br />
ω (rad/s)<br />
1000.00<br />
800.00<br />
600.00<br />
400.00<br />
200.00<br />
0.00<br />
Speeds 1 - 9<br />
1 10 19 28 37 46 55 64 73 82 91 100<br />
Time<br />
Count 1<br />
Count 2<br />
Count 3<br />
Count 4<br />
Count 5<br />
Count 6<br />
Count 7<br />
Count 8<br />
Count 9<br />
Figure 13: Angular velocity (rad/sec) vs. Time (ms) with speeds 1 – 9<br />
• The experimental and theoretical data resulted in the same steady state angular<br />
velocity.<br />
• The theoretical data had a slightly slower acceleration than the experimental data.<br />
o This was due to errors in the selection of τ for the theoretical data.<br />
• The motor model is a very useful tool in the design and simulation of systems.<br />
13
Appendix A – C Program<br />
This program will set the PWM output and collect tachometer speed data. The user<br />
inputs a number between 0 and 9, which sets the PWM to a value between 0 and 255.<br />
The program will collect analog inputs every 10 ms. The data will be displayed onscreen<br />
when “t” is pressed on the keyboard.<br />
#include <br />
#include <br />
#include <br />
#include "sio.c"<br />
#define c_kinetic_pos 0x06 /* static friction */<br />
#define c_kinetic_neg 0x12 /* make the value positive */<br />
#define c_static_pos 0x07 /* kinetic friction */<br />
#define c_static_neg 0x08 /* make the value positive */<br />
#define c_max 255<br />
#define c_min 255 /* make the value positive */<br />
#define CLK_ms 50 /* update every 10 ms*/<br />
int moving = 0; /* assume it starts without moving */<br />
int j = 0;<br />
int table[100];<br />
int count = 0; /* a count value to be output on port B */<br />
int db_correct = 1; /* deadband correction is on by default */<br />
unsigned int CNT_timer0; /* The delay time */<br />
volatile unsigned int CLK_ticks = 0; /* The current number of ms */<br />
volatile unsigned int CLK_seconds = 0; /* The current number of seconds */<br />
int deadband(int c_wanted);<br />
void AD_setup();<br />
int AD_read();<br />
void PWM_init();<br />
void PWM_update(int value);<br />
int v_output(int v_adjusted);<br />
void IO_setup();<br />
void IO_update();<br />
void delay(int ticks);<br />
void create_array();<br />
void CLK_setup();<br />
int deadband(int c_wanted)<br />
{ /* call this routine when updating */<br />
int c_pos;<br />
int c_neg;<br />
int c_adjusted;<br />
if(moving == 1)<br />
{<br />
c_pos = c_kinetic_pos;<br />
c_neg = c_kinetic_neg;<br />
14
}<br />
}<br />
else<br />
{<br />
c_pos = c_static_pos;<br />
c_neg = c_static_neg;<br />
}<br />
if(c_wanted == 0)<br />
{ /* turn off the output */<br />
c_adjusted = 0;<br />
}<br />
else if(c_wanted > 0)<br />
{ /* a positive output */<br />
c_adjusted = c_pos +<br />
(unsigned)(c_max - c_pos) * c_wanted / c_max;<br />
if(c_adjusted > c_max) c_adjusted = c_max;<br />
}<br />
else<br />
{ /* the output must be negative */<br />
c_adjusted = -c_neg -<br />
(unsigned)(c_min - c_neg) * -c_wanted / c_min;<br />
if(c_adjusted < -c_min) c_adjusted = -c_min;<br />
}<br />
return c_adjusted;<br />
void AD_setup()<br />
{<br />
ADMUX = 0xC0; // Set the input channel to zero<br />
ADCSRA = 0xE0; // Turn on the ADC and set to free running<br />
}<br />
int AD_read()<br />
{<br />
return (ADCW >> 2); // Returns digital output from AD register<br />
}<br />
void PWM_init()<br />
{ /* call this routine once when the program starts */<br />
DDRD |= (1
{ /* call from the interrupt loop */<br />
int RefSignal; // the value to be returned<br />
if(v_adjusted >= 0)<br />
{<br />
/* set the direction bits to CW on, CCW off */<br />
PORTC = (PINC & 0xFC) | 0x02; /* bit 1 on, 0 off */<br />
if(v_adjusted > 255)<br />
{ /* clip output over maximum */<br />
RefSignal = 255;<br />
}<br />
else<br />
{<br />
RefSignal = v_adjusted;<br />
}<br />
}<br />
else<br />
{ /* need to reverse output sign */<br />
/* set the direction bits to CW off, CCW on */<br />
PORTC = (PINC & 0xFC) | 0x01; /* bit 0 on, 1 off */<br />
if(v_adjusted < -255)<br />
{ /* clip output below minimum */<br />
RefSignal = 255;<br />
}<br />
else<br />
{<br />
RefSignal = -v_adjusted; /* flip sign */<br />
}<br />
}<br />
}<br />
return RefSignal;<br />
void IO_setup()<br />
{<br />
DDRD = 0xFF; // all of port B is outputs<br />
AD_setup(); // Enable AD inputs<br />
PWM_init(); // Setup the PWM outputs<br />
DDRA = (unsigned char)0; // Set port A to outputs<br />
}<br />
void IO_update()<br />
{// This routine will run once per interrupt for updates<br />
if(db_correct == 0)<br />
{<br />
PWM_update(v_output(count));<br />
}<br />
else<br />
{<br />
PWM_update(v_output(deadband(count)));<br />
}<br />
if(count > 0)<br />
{<br />
create_array();<br />
}<br />
}<br />
16
void delay(int ticks)<br />
{ // ticks are approximately 1ms<br />
volatile int i, j;<br />
}<br />
for(i = 0; i < ticks; i++)<br />
{<br />
for(j = 0; j < 1000; j++){}<br />
}<br />
SIGNAL(SIG_OVERFLOW0)<br />
{ // The interrupt calls this function<br />
}<br />
CLK_ticks += CLK_ms;<br />
if(CLK_ticks >= 10)<br />
{ // The number of interrupts between output changes<br />
CLK_ticks = CLK_ticks - 10;<br />
CLK_seconds++;<br />
IO_update();<br />
}<br />
TCNT0 = CNT_timer0;<br />
void CLK_setup()<br />
{ // Start the interrupt service routine<br />
}<br />
TCCR0 = (0
}<br />
{<br />
}<br />
j = 0;<br />
count = 0;<br />
// -------------- The main program loop ------------------<br />
int main()<br />
{<br />
int c;<br />
sio_init();<br />
IO_setup();<br />
CLK_setup();<br />
for(;;)<br />
{<br />
while((c = input()) == -1){} // wait for a keypress<br />
if(c == 'd')<br />
{<br />
if(db_correct == 0)<br />
{<br />
db_correct = 1;<br />
outln("Deadband correction on");<br />
}<br />
else<br />
{<br />
db_correct = 0;<br />
outln("Deadband correction off");<br />
}<br />
}<br />
else if(c == 's')<br />
{<br />
count = 0;<br />
moving = 0;<br />
outint(count);<br />
outln(" = count, motor stopped");<br />
}<br />
else if(c == 'h')<br />
{<br />
outln(" d: enable (default) or disable deadband comp.");<br />
outln(" s: stop the motor");<br />
outln(" q: quit");<br />
}<br />
else if(c == '0')<br />
{<br />
count = 0;<br />
}<br />
else if(c == '1')<br />
{<br />
count = 28;<br />
}<br />
else if(c == '2')<br />
{<br />
count = 56;<br />
}<br />
18
}<br />
sio_cleanup();<br />
return 1;<br />
}<br />
else if(c == '3')<br />
{<br />
count = 84;<br />
}<br />
else if(c == '4')<br />
{<br />
count = 112;<br />
}<br />
else if(c == '5')<br />
{<br />
count = 140;<br />
}<br />
else if(c == '6')<br />
{<br />
count = 168;<br />
}<br />
else if(c == '7')<br />
{<br />
count = 196;<br />
}<br />
else if(c == '8')<br />
{<br />
count = 224;<br />
}<br />
else if(c == '9')<br />
{<br />
count = 252;<br />
}<br />
else if(c == 'r')<br />
{<br />
count = 0;<br />
outln("stopped");<br />
j = 0;<br />
}<br />
else if(c == 't')<br />
{<br />
int k;<br />
for(k = 0; k < 100; k++)<br />
{<br />
outint(table[k]);<br />
outln("");<br />
}<br />
}<br />
else if(c == 'q')<br />
{<br />
count = 0;<br />
moving = 0;<br />
outint(count);<br />
outln(" = count, Quitting");<br />
break;<br />
}<br />
19
Appendix B – Experimental angular velocity<br />
20
Appendix C – Theoretical angular velocity<br />
22