LMI Approach to Iterative Learning Control Design - ResearchGate
LMI Approach to Iterative Learning Control Design - ResearchGate
LMI Approach to Iterative Learning Control Design - ResearchGate

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
H 1 ⎡<br />
0 h1 0 · · ·<br />
⎤<br />
0<br />
⎢ 0<br />
⎢<br />
N = ⎢ 0<br />
⎢<br />
⎣<br />
.<br />
h2<br />
h3<br />
.<br />
h1<br />
h2<br />
.<br />
· · ·<br />
· · ·<br />
. ..<br />
0 ⎥<br />
0 ⎥<br />
.<br />
⎦<br />
0 hn hn−1 · · · h2<br />
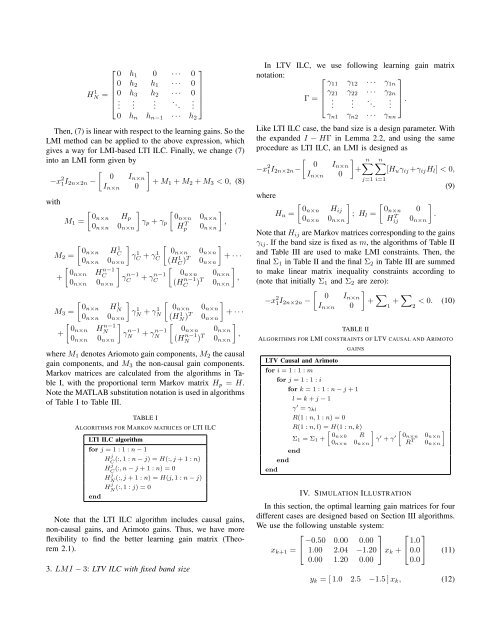
Then, (7) is linear with respect <strong>to</strong> the learning gains. So the<br />
<strong>LMI</strong> method can be applied <strong>to</strong> the above expression, which<br />
gives a way for <strong>LMI</strong>-based LTI ILC. Finally, we change (7)<br />
in<strong>to</strong> an <strong>LMI</strong> form given by<br />
−x 2 <br />
1I2n×2n −<br />
0 In×n<br />
0<br />
with<br />
In×n<br />
<br />
0n×n Hp<br />
M1 =<br />
0n×n 0n×n<br />
M2 =<br />
+<br />
0n×n H 1 C<br />
0n×n 0n×n<br />
0n×n H n−1<br />
C<br />
0n×n 0n×n<br />
M3 =<br />
+<br />
0n×n H 1 N<br />
0n×n 0n×n<br />
0n×n H n−1<br />
N<br />
0n×n 0n×n<br />
<br />
<br />
+ M1 + M2 + M3 < 0, (8)<br />
γp + γp<br />
<br />
γ 1 C + γ1 C<br />
<br />
γ n−1<br />
C<br />
+ γn−1<br />
C<br />
<br />
γ 1 N + γ1 N<br />
<br />
γ n−1<br />
N<br />
+ γn−1<br />
N<br />
0n×n 0n×n<br />
H T p<br />
0n×n<br />
0n×n 0n×n<br />
<br />
,<br />
<br />
+ · · ·<br />
<br />
,<br />
(H1 C )T 0n×n<br />
<br />
0n×n 0n×n<br />
(H n−1<br />
C )T 0n×n<br />
0n×n 0n×n<br />
<br />
+ · · ·<br />
<br />
,<br />
(H1 N )T 0n×n<br />
<br />
0n×n 0n×n<br />
(H n−1<br />
N )T 0n×n<br />
where M1 denotes Ariomo<strong>to</strong> gain components, M2 the causal<br />
gain components, and M3 the non-causal gain components.<br />
Markov matrices are calculated from the algorithms in Table<br />
I, with the proportional term Markov matrix Hp = H.<br />
Note the MATLAB substitution notation is used in algorithms<br />
of Table I <strong>to</strong> Table III.<br />
TABLE I<br />
ALGORITHMS FOR MARKOV MATRICES OF LTI ILC<br />
LTI ILC algorithm<br />
for j = 1 : 1 : n − 1<br />
H j<br />
C (:, 1 : n − j) = H(:, j + 1 : n)<br />
H j<br />
C (:, n − j + 1 : n) = 0<br />
H j<br />
N (:, j + 1 : n) = H(j, 1 : n − j)<br />
H j<br />
N (:, 1 : j) = 0<br />
end<br />
Note that the LTI ILC algorithm includes causal gains,<br />
non-causal gains, and Arimo<strong>to</strong> gains. Thus, we have more<br />
flexibility <strong>to</strong> find the better learning gain matrix (Theorem<br />
2.1).<br />
3. <strong>LMI</strong> − 3: LTV ILC with fixed band size<br />
In LTV ILC, we use following learning gain matrix<br />
notation: ⎡<br />
γ11 γ12 · · ·<br />
⎤<br />
γ1n<br />
⎢ γ21<br />
Γ = ⎢<br />
⎣<br />
.<br />
γ22<br />
.<br />
· · ·<br />
. ..<br />
γ2n ⎥<br />
.<br />
⎦ .<br />
γn1 γn2 · · · γnn<br />
Like LTI ILC case, the band size is a design parameter. With<br />
the expanded I − HΓ in Lemma 2.2, and using the same<br />
procedure as LTI ILC, an <strong>LMI</strong> is designed as<br />
−x 2 n n<br />
0 In×n<br />
1I2n×2n−<br />
+ [Huγij +γijHl] < 0,<br />
0<br />
where<br />
In×n<br />
<br />
0n×n Hij<br />
Hu =<br />
0n×n 0n×n<br />
j=1 i=1<br />
<br />
0n×n<br />
; Hl =<br />
H T ij<br />
0<br />
0n×n<br />
Note that Hij are Markov matrices corresponding <strong>to</strong> the gains<br />
γij. If the band size is fixed as m, the algorithms of Table II<br />
and Table III are used <strong>to</strong> make <strong>LMI</strong> constraints. Then, the<br />
final Σ1 in Table II and the final Σ2 in Table III are summed<br />
<strong>to</strong> make linear matrix inequality constraints according <strong>to</strong><br />
(note that initially Σ1 and Σ2 are zero):<br />
−x 2 <br />
0 In×n<br />
1I2n×2n −<br />
0<br />
In×n<br />
TABLE II<br />
<br />
+ <br />
1<br />
+ <br />
2<br />
<br />
.<br />
(9)<br />
< 0. (10)<br />
ALGORITHMS FOR <strong>LMI</strong> CONSTRAINTS OF LTV CAUSAL AND ARIMOTO<br />
LTV Causal and Arimo<strong>to</strong><br />
GAINS<br />
for i = 1 : 1 : m<br />
for j = 1 : 1 : i<br />
for k = 1 : 1 : n − j + 1<br />
l = k + j − 1<br />
γ ′ = γkl<br />
R(1 : n, 1 : n) = 0<br />
R(1 : n, l) = H(1 : n, k)<br />
0n×0 R<br />
Σ1 = Σ1 +<br />
end<br />
end<br />
end<br />
0n×n 0n×n<br />
<br />
γ ′ + γ ′<br />
<br />
0n×n 0n×n<br />
RT <br />
0n×n<br />
IV. SIMULATION ILLUSTRATION<br />
In this section, the optimal learning gain matrices for four<br />
different cases are designed based on Section III algorithms.<br />
We use the following unstable system:<br />
⎡<br />
−0.50<br />
xk+1 = ⎣ 1.00<br />
0.00<br />
2.04<br />
⎤ ⎡<br />
0.00<br />
−1.20 ⎦ xk + ⎣<br />
0.00 1.20 0.00<br />
1.0<br />
⎤<br />
0.0 ⎦ (11)<br />
0.0<br />
yk = [ 1.0 2.5 −1.5 ] xk, (12)