- Page 1 and 2:
2005 March, HK courtesy ABB 2. Inst
- Page 3 and 4:
Industrial Automation The instrumen
- Page 5 and 6:
2.1 Instrumentation 2.1.1 Market 2.
- Page 7 and 8:
Industrial Automation Binary Signal
- Page 9 and 10:
Industrial Automation Precision: re
- Page 11 and 12:
Industrial Automation Variable diff
- Page 13 and 14:
Industrial Automation Small positio
- Page 15 and 16:
Industrial Automation Force measure
- Page 17 and 18:
courtesy Parker Motion & Control In
- Page 19 and 20:
Industrial Automation 2.1.3.2 Tempe
- Page 21 and 22:
Thermo-element (Thermocouple) two d
- Page 23 and 24:
•pulsed laser •load cell •pul
- Page 25 and 26:
Other means: Magnetic-dynamic Corio
- Page 27 and 28:
2.1 Instrumentation 2.1.1 Market 2.
- Page 29 and 30: Industrial Automation Drives (varia
- Page 31 and 32: Pumps, valves, rods,… Industrial
- Page 33 and 34: Industrial Automation Transducer A
- Page 35 and 36: Object measurand Transducer Industr
- Page 37 and 38: 2.1 Instrumentation 2.1.1 Market 2.
- Page 39 and 40: Piping and Instrumentation Diagram
- Page 41 and 42: Industrial Automation Instrumentati
- Page 43 and 44: Square root extraction of the input
- Page 45 and 46: Connection to process, or instrumen
- Page 47 and 48: Industrial Automation German IP-Pro
- Page 49 and 50: Industrial Automation European Expl
- Page 51 and 52: Industrial Automation Assessment Ho
- Page 54 and 55: 2005 March, HK set point Control of
- Page 56 and 57: 140 120 2 1 180 3 5 200 4 Why do we
- Page 58 and 59: Industrial Automation Controllers T
- Page 60 and 61: Industrial Automation Modeling: Con
- Page 62 and 63: set-point (solicited) Sollwert vale
- Page 64 and 65: Steam ∆P ∆f Main steam valve Ac
- Page 66 and 67: Industrial Automation Two-point con
- Page 68 and 69: value % 1.20 1.00 0.80 0.60 0.40 0.
- Page 70 and 71: Industrial Automation A glance back
- Page 72 and 73: The Watts "governor" (1791) - the f
- Page 74 and 75: Industrial Automation Plant model f
- Page 76 and 77: m(t), y 0 (t) 2 1.5 1 0.5 0 -0.5 co
- Page 78 and 79: u 0 (t), y 0 (t) 2 1.8 1.6 1.4 1.2
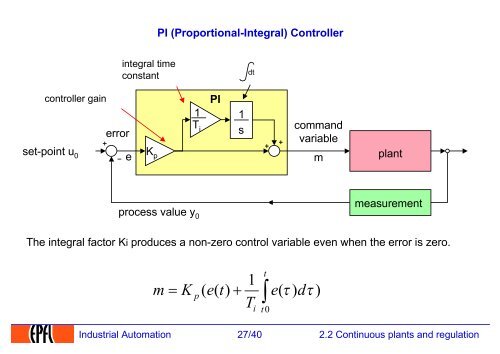
- Page 82 and 83: PID-Controller (Proportional-Integr
- Page 84 and 85: time domain Laplace domain Industri
- Page 86 and 87: 1 0 P (K p = 15) less error, but un
- Page 88 and 89: 2.1 Instrumentation 2.2 Control 2.2
- Page 90 and 91: Industrial Automation Nested loops
- Page 92 and 93: Industrial Automation To probe furt
- Page 95 and 96: POST_START_TIMER_MOD N_GT FAULT_STA
- Page 97 and 98: Industrial Automation Programmable
- Page 99 and 100: Industrial Automation PLC: Characte
- Page 101 and 102: Switzerland SAIA, Weidmüller Indus
- Page 103 and 104: (1) (2) (3) Compact Monolithic cons
- Page 105 and 106: courtesy ABB Industrial Automation
- Page 107 and 108: € compact PLC (fixed number of I/
- Page 109 and 110: 23 4 3 3 2 12 2 I/O modules Industr
- Page 111 and 112: Industrial Automation Specific Cont
- Page 113 and 114: Micro: 15 to 128 I/O points Medium:
- Page 115 and 116: Industrial Automation 2.3.3 PLCs: F
- Page 117 and 118: CPU fieldbus controller field bus R
- Page 119 and 120: Industrial Automation Matching the
- Page 121 and 122: Industrial Automation Continuous Pl
- Page 123 and 124: "combinatorial" 1) e.g. ladder logi
- Page 125 and 126: Extend procedural languages to expr
- Page 127 and 128: Function Block Diagram (FBD) AUTO A
- Page 129 and 130: Industrial Automation 2.4.2.1 Funct
- Page 131 and 132:
Example 1: Example 2: A B external
- Page 133 and 134:
Industrial Automation Function Bloc
- Page 135 and 136:
Types of Programming Organisation U
- Page 137 and 138:
inary elements AND OR XOR S1 SR R Q
- Page 139 and 140:
Basic blocks Industrial Automation
- Page 141 and 142:
AXIS_REF Function Block library for
- Page 143 and 144:
Industrial Automation Function Bloc
- Page 145 and 146:
Industrial Automation Function Bloc
- Page 147 and 148:
Segment or POU (program organizatio
- Page 149 and 150:
Industrial Automation Parallel exec
- Page 151 and 152:
esource task task program program I
- Page 153 and 154:
Connecting to Input/Output, Method
- Page 155 and 156:
Industrial Automation 2.3.5.5 Struc
- Page 157 and 158:
Industrial Automation Data Types Si
- Page 159 and 160:
Industrial Automation Example of De
- Page 161 and 162:
Industrial Automation SFC (Sequenti
- Page 163 and 164:
Industrial Automation SFC: Initial
- Page 165 and 166:
Industrial Automation SFC: P1, N an
- Page 167 and 168:
Variables: Input: In0, In1, In2, In
- Page 169 and 170:
Industrial Automation SFC: Structur
- Page 171 and 172:
Function Blocks: Continuous (time)
- Page 173 and 174:
Industrial Automation Flow Charts O
- Page 175 and 176:
Industrial Automation 2.3.5.7 Ladde
- Page 177 and 178:
origin: electrical circuit correspo
- Page 179 and 180:
Series Parallel Industrial Automati
- Page 181 and 182:
Industrial Automation Ladder logic
- Page 183 and 184:
Industrial Automation 2.3.6 Instruc
- Page 185 and 186:
Industrial Automation Instruction L
- Page 187 and 188:
Industrial Automation Programming e
- Page 189 and 190:
Industrial Automation Program maint
- Page 191 and 192:
Industrial Automation IEC 61131-3 e
- Page 193:
Industrial Automation Limitations o