

Avoidance of brake squeal by a separation of the brake ... - tuprints
Avoidance of brake squeal by a separation of the brake ... - tuprints
Avoidance of brake squeal by a separation of the brake ... - tuprints

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4 Structural optimization <strong>of</strong> automotive and bicycle <strong>brake</strong> discs<br />
position are varied continuously, in <strong>the</strong> discrete case, <strong>the</strong> basic geometry <strong>of</strong> <strong>the</strong><br />
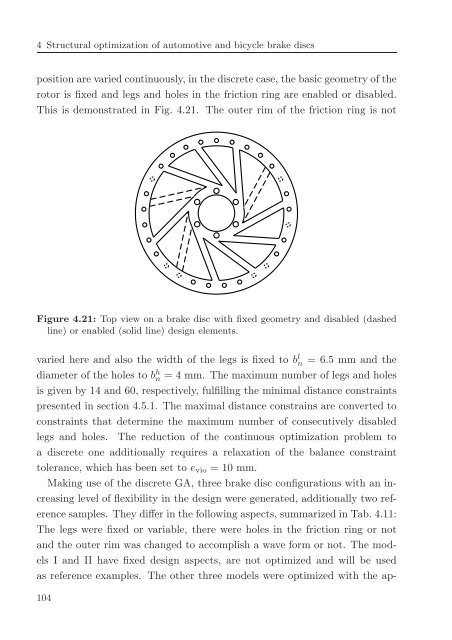
rotor is fixed and legs and holes in <strong>the</strong> friction ring are enabled or disabled.<br />
This is demonstrated in Fig. 4.21. The outer rim <strong>of</strong> <strong>the</strong> friction ring is not<br />
Figure 4.21: Top view on a <strong>brake</strong> disc with fixed geometry and disabled (dashed<br />
line) or enabled (solid line) design elements.<br />
varied here and also <strong>the</strong> width <strong>of</strong> <strong>the</strong> legs is fixed to b l n = 6.5 mm and <strong>the</strong><br />
diameter <strong>of</strong> <strong>the</strong> holes to b h n = 4 mm. The maximum number <strong>of</strong> legs and holes<br />
is given <strong>by</strong> 14 and 60, respectively, fulfilling <strong>the</strong> minimal distance constraints<br />
presented in section 4.5.1. The maximal distance constrains are converted to<br />
constraints that determine <strong>the</strong> maximum number <strong>of</strong> consecutively disabled<br />
legs and holes. The reduction <strong>of</strong> <strong>the</strong> continuous optimization problem to<br />
a discrete one additionally requires a relaxation <strong>of</strong> <strong>the</strong> balance constraint<br />
tolerance, which has been set to e vio = 10 mm.<br />
Making use <strong>of</strong> <strong>the</strong> discrete GA, three <strong>brake</strong> disc configurations with an increasing<br />
level <strong>of</strong> flexibility in <strong>the</strong> design were generated, additionally two reference<br />
samples. They differ in <strong>the</strong> following aspects, summarized in Tab. 4.11:<br />
The legs were fixed or variable, <strong>the</strong>re were holes in <strong>the</strong> friction ring or not<br />
and <strong>the</strong> outer rim was changed to accomplish a wave form or not. The models<br />
I and II have fixed design aspects, are not optimized and will be used<br />
as reference examples. The o<strong>the</strong>r three models were optimized with <strong>the</strong> ap-<br />
104














