4 Chopper-Controlled DC Motor Drive
4 Chopper-Controlled DC Motor Drive
4 Chopper-Controlled DC Motor Drive

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
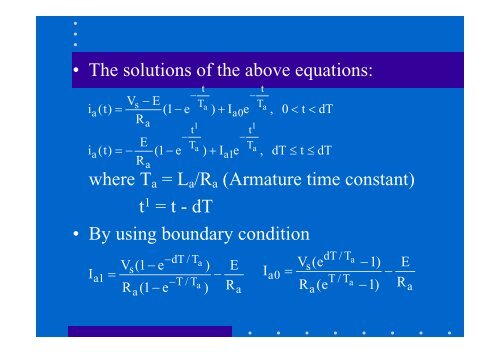
• The solutions of the above equations:<br />
t<br />
V E<br />
i (t)<br />
s − T<br />
(1 e a T<br />
) I e a<br />
a = − + a0 , 0 < t <<br />
R<br />
i<br />
a<br />
(t)<br />
= −<br />
a<br />
E<br />
R<br />
a<br />
(1 − e<br />
−<br />
1<br />
t<br />
−<br />
T<br />
a<br />
) +<br />
I<br />
a1<br />
e<br />
where T a = L a /R a (Armature time constant)<br />
t 1 = t - dT<br />
• By using boundary condition<br />
I<br />
a1<br />
=<br />
V (1 − e<br />
s<br />
R<br />
a<br />
(1 − e<br />
−dT / T<br />
−T / T<br />
a<br />
a<br />
)<br />
)<br />
−<br />
E<br />
R<br />
−<br />
1<br />
t<br />
−<br />
T<br />
a<br />
a<br />
t<br />
,<br />
I<br />
dT<br />
a0<br />
≤<br />
=<br />
t<br />
≤<br />
V (e<br />
s<br />
R<br />
a<br />
dT<br />
dT<br />
(e<br />
dT / T<br />
T / T<br />
a<br />
a<br />
−1)<br />
−1)<br />
−<br />
E<br />
R<br />
a