STATIC EQUILIBRIUM: FORCES AND TORQUES - Ryerson ...
STATIC EQUILIBRIUM: FORCES AND TORQUES - Ryerson ...
STATIC EQUILIBRIUM: FORCES AND TORQUES - Ryerson ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
S1 - 1<br />
<strong>STATIC</strong> <strong>EQUILIBRIUM</strong>: <strong>FORCES</strong> <strong>AND</strong> <strong>TORQUES</strong><br />
OBJECTIVE:<br />
To study the role of forces and torques for an object in equilibrium.<br />
INTRODUCTION:<br />
For an object to be in static equilibrium (zero acceleration and zero velocity) two conditions have to be<br />
satisfied:<br />
1. The sum of all external forces must be zero:<br />
2. The sum of all torques (calculated with respect to an arbitrary common point) must be zero:<br />
Torque is a quantity that measures the tendency of an applied force to cause rotation. Torque depends not only<br />
on the amount of force applied but also on the position of the point of application of the force relative to the axis<br />
of rotation. By convention, the torque of a force that tends to cause a clockwise (CW) rotation (on a plane) is<br />
negative while the torque that tends to cause a counterclockwise (CCW) rotation is positive.<br />
where F = force<br />
d = distance (measured on the perpendicular direction ) from the axis<br />
of rotation to the line of action of the force.<br />
Note that inanimate objects, such as table-tops and axles, can exert forces on objects resting on them.<br />
Recognizing all forces applied to a given object is extremely important. Equally important is to know where, on<br />
the object, these forces are applied.<br />
For example, one of the forces that acts on a body is the force of gravity or weight F g = mg (its torque denoted<br />
τ g ).<br />
It is important to know where that force acts, i.e. to know the position of the centre of gravity, x cm .<br />
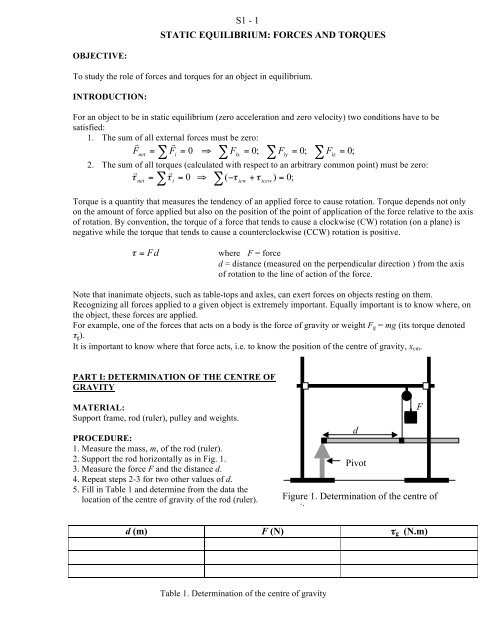
PART I: DETERMINATION OF THE CENTRE OF<br />
GRAVITY<br />
MATERIAL:<br />
Support frame, rod (ruler), pulley and weights.<br />
PROCEDURE:<br />
1. Measure the mass, m, of the rod (ruler).<br />
2. Support the rod horizontally as in Fig. 1.<br />
3. Measure the force F and the distance d.<br />
4. Repeat steps 2-3 for two other values of d.<br />
5. Fill in Table 1 and determine from the data the<br />
location of the centre of gravity of the rod (ruler).<br />
d<br />
Pivot<br />
Figure 1. Determination of the centre of<br />
gravity<br />
F<br />
d (m) F (N) τ g (N.m)<br />
Table 1. Determination of the centre of gravity
S1 - 2<br />
PART II: <strong>EQUILIBRIUM</strong> WITH PARALLEL <strong>FORCES</strong><br />
MATERIAL:<br />
Support frame, rod (ruler), pulley and weights.<br />
PROCEDURE:<br />
1. Place a mass M = 500 g a distance l along the<br />
rod (ruler) from the pivot.<br />
2. Support the rod horizontally, as in Fig. 2,<br />
with the left end resting again on the pivot.<br />
3. Measure the force F and the distance d that<br />
yields static equilibrium.<br />
4. Repeat step 2-3 for two other values of<br />
M and l.<br />
5. Fill in Table 2.<br />
6. What is the force on the rod at the pivot?<br />
7. Discuss your results.<br />
F<br />
d<br />
Mg<br />
l<br />
Figure 2. Part II: Equilibrium with parallel forces<br />
l (m) d (m) F (N) Fd (N.m) τ g =mg. x cm (Nm) Mgl (N.m) Σ τ i (N.m)<br />
Table 2. Part II: Equilibrium with parallel forces<br />
PART III: <strong>EQUILIBRIUM</strong> WITH PARALLEL <strong>FORCES</strong><br />
MATERIAL:<br />
Support frame, rod (ruler), pulleys and weights.<br />
PROCEDURE:<br />
1. Start with a similar mass M = 500 g a distance<br />
l along the rod from the pivot.<br />
2. Support now the left end of the rod (ruler)<br />
with a hanging weight P.<br />
3. Adjust F and P to reach static equilibrium<br />
(with the rod horizontal) and record the forces<br />
F, Mg and P.<br />
4. Repeat step 3 for two other values of<br />
M and l.<br />
5. Fill in Table 3.<br />
P<br />
F<br />
Mg<br />
Figure 3. Part III: Equilibrium with parallel forces<br />
F (N) P (N) Mg (N) F g =mg (N)<br />
Table 3. Part III: Equilibrium with parallel forces<br />
6. Are all entries zero in the last column of Tables 2 and 3, as expected?<br />
7. Discuss your results.<br />
8. For comparable values of M and F, how does the value of P compare with the value found in step 6 of part<br />
II?
S1 - 3<br />
I. PRELAB QUESTIONS<br />
1. What is meant by static equilibrium? [1]<br />
2. How do you define the torque (or moment of a force)? Give the most general definition and illustrate<br />
with a diagram. [1.5]<br />
3. Can a body be in static equilibrium if subjected to only one force? Explain briefly. [1.5]<br />
4. Define centre of gravity. [1]<br />
The following instructions will help you prepare to write the report:<br />
Read the procedure in each part of this experiment and make sure you understand the structure of the<br />
three particular tables required to record the data.<br />
II. PROCEDURE<br />
1. Draw a diagram to describe the apparatus used to determine the centre of gravity of a bar.<br />
2. Fill up the tables as required.<br />
III. CONCLUSIONS<br />
1. Is the centre of gravity where you expect if to be? Explain or justify the discrepancies.<br />
2. Based on the theory of static equilibrium, which values do you expect to obtain for the last columns of<br />
tables 2 and 3 and which values do you get for those cells? Explain the discrepancies.