

Computer (matrix) version of the stiffness method 1. The computer ...
Computer (matrix) version of the stiffness method 1. The computer ...
Computer (matrix) version of the stiffness method 1. The computer ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
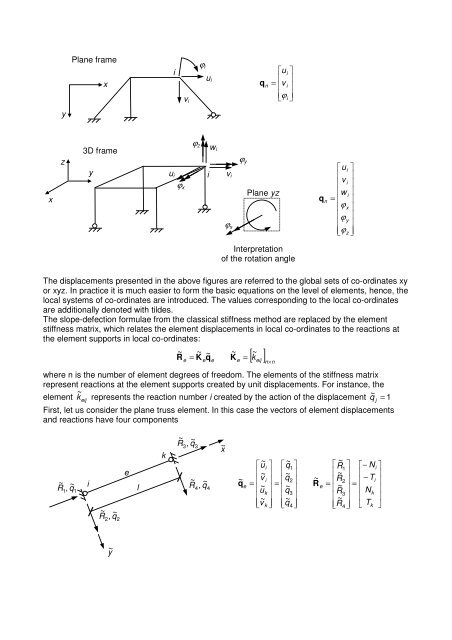
Plane frame<br />
x<br />
i<br />
v i<br />
u i<br />
q<br />
n<br />
⎡ui<br />
⎤<br />
⎢ ⎥<br />
=<br />
⎢<br />
v i ⎥<br />
⎢⎣<br />
ϕ ⎥<br />
i ⎦<br />
y<br />
x<br />
z<br />
3D frame<br />
y<br />
u i<br />
ϕ x<br />
ϕ z<br />
ϕ i<br />
i<br />
w i<br />
v i<br />
ϕ x<br />
ϕ y<br />
Plane yz<br />
q<br />
n<br />
⎡ui<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
v i ⎥<br />
⎢w<br />
⎥<br />
i<br />
= ⎢ ⎥<br />
⎢ϕ<br />
x ⎥<br />
⎢ϕ<br />
⎥<br />
y<br />
⎢ ⎥<br />
⎢⎣<br />
ϕz<br />
⎥⎦<br />
Interpretation<br />
<strong>of</strong> <strong>the</strong> rotation angle<br />
<strong>The</strong> displacements presented in <strong>the</strong> above figures are referred to <strong>the</strong> global sets <strong>of</strong> co-ordinates xy<br />
or xyz. In practice it is much easier to form <strong>the</strong> basic equations on <strong>the</strong> level <strong>of</strong> elements, hence, <strong>the</strong><br />
local systems <strong>of</strong> co-ordinates are introduced. <strong>The</strong> values corresponding to <strong>the</strong> local co-ordinates<br />
are additionally denoted with tildes.<br />
<strong>The</strong> slope-defection formulae from <strong>the</strong> classical <strong>stiffness</strong> <strong>method</strong> are replaced by <strong>the</strong> element<br />
<strong>stiffness</strong> <strong>matrix</strong>, which relates <strong>the</strong> element displacements in local co-ordinates to <strong>the</strong> reactions at<br />
<strong>the</strong> element supports in local co-ordinates:<br />
~ K<br />
~ ~<br />
Re<br />
= Keq<br />
~<br />
e e<br />
[ k eij<br />
]<br />
n×<br />
n<br />
where n is <strong>the</strong> number <strong>of</strong> element degrees <strong>of</strong> freedom. <strong>The</strong> elements <strong>of</strong> <strong>the</strong> <strong>stiffness</strong> <strong>matrix</strong><br />
represent reactions at <strong>the</strong> element supports created by unit displacements. For instance, <strong>the</strong><br />
element k ~ eij represents <strong>the</strong> reaction number i created by <strong>the</strong> action <strong>of</strong> <strong>the</strong> displacement q<br />
~ = j 1<br />
First, let us consider <strong>the</strong> plane truss element. In this case <strong>the</strong> vectors <strong>of</strong> element displacements<br />
and reactions have four components<br />
= ~<br />
~ q<br />
~<br />
i<br />
R 1,<br />
1<br />
2<br />
~ R 3,<br />
q<br />
~<br />
3<br />
x ~<br />
k<br />
e<br />
~ ~<br />
l<br />
R 4,<br />
q 4<br />
~ R<br />
~<br />
2,<br />
q<br />
y ~<br />
q<br />
~<br />
e<br />
⎡u<br />
~ ⎤ ⎡ ~<br />
i q1<br />
⎤<br />
⎢ ⎥ ⎢ ⎥<br />
⎢v<br />
~ ~<br />
i ⎥ = ⎢q2<br />
= ⎥<br />
⎢u<br />
~ ⎥ ⎢~<br />
⎥<br />
k q3<br />
⎢ ⎥ ⎢~<br />
⎥<br />
~<br />
⎣v<br />
k<br />
⎦ ⎢⎣<br />
q4<br />
⎥⎦<br />
~<br />
R<br />
e<br />
⎡ ~<br />
R<br />
⎢ ~<br />
⎢R<br />
=<br />
⎢ ~<br />
R<br />
⎢ ~<br />
⎢⎣<br />
R<br />
1<br />
2<br />
3<br />
4<br />
⎤ ⎡−<br />
Ni<br />
⎤<br />
⎥ ⎢ ⎥<br />
⎥ ⎢<br />
−Ti<br />
= ⎥<br />
⎥ ⎢ N ⎥<br />
k<br />
⎥ ⎢ ⎥<br />
⎥⎦<br />
⎣ Tk<br />
⎦














