Spring Loaded Inverted Pendulum Single Legged Hopping Robot
Spring Loaded Inverted Pendulum Single Legged Hopping Robot
Spring Loaded Inverted Pendulum Single Legged Hopping Robot
SHOW LESS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
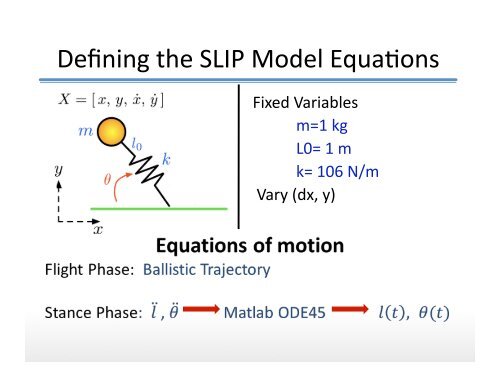
Defining the SLIP Model EquaAons<br />
Fixed Variables<br />
m=1 kg<br />
L0= 1 m<br />
k= 106 N/m<br />
Vary (dx, y)