State estimation with Kalman Filter
State estimation with Kalman Filter
State estimation with Kalman Filter

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
F. Haugen: Kompendium for Kyb. 2 ved Høgskolen i Oslo 110<br />
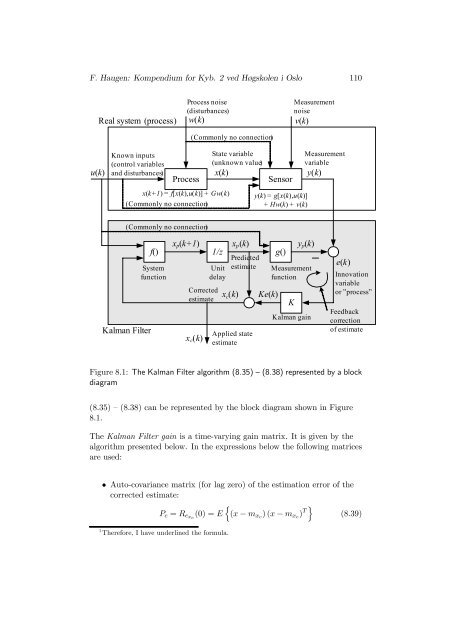
Real system (process)<br />
Process noise<br />
(disturbances)<br />
w(k)<br />
(Commonly no connection)<br />
Measurement<br />
noise<br />
v(k)<br />
u(k)<br />
Known inputs<br />
(control variables<br />
and disturbances)<br />
Process<br />
x(k)<br />
x(k+1) = f[x(k),u(k)] + Gw(k)<br />
(Commonly no connection)<br />
<strong>State</strong> variable<br />
(unknown value)<br />
Sensor<br />
y(k) = g[x(k),u(k)]<br />
+ Hw(k) + v(k)<br />
Measurement<br />
variable<br />
y(k)<br />
(Commonly no connection)<br />
<strong>Kalman</strong> <strong>Filter</strong><br />
f()<br />
System<br />
function<br />
x p (k+1)<br />
1/z<br />
Corrected<br />
estimate<br />
x c (k)<br />
Unit<br />
delay<br />
x c (k)<br />
x p (k)<br />
Predicted<br />
estimate<br />
Applied state<br />
estimate<br />
Ke(k)<br />
g()<br />
K<br />
y p (k)<br />
Measurement<br />
function<br />
<strong>Kalman</strong> gain<br />
e(k)<br />
Innovation<br />
variable<br />
or ”process”<br />
Feedback<br />
correction<br />
of estimate<br />
Figure 8.1: The <strong>Kalman</strong> <strong>Filter</strong> algorithm (8.35) — (8.38) represented by a block<br />
diagram<br />
(8.35) — (8.38) can be represented by the block diagram shown in Figure<br />
8.1.<br />
The <strong>Kalman</strong> <strong>Filter</strong> gain is a time-varying gain matrix. It is given by the<br />
algorithm presented below. In the expressions below the following matrices<br />
are used:<br />
• Auto-covariance matrix (for lag zero) of the <strong>estimation</strong> error of the<br />
corrected estimate:<br />
P c = R ex c (0) = E n(x − m xc )(x − m xc ) T o (8.39)<br />
1 Therefore, I have underlined the formula.