controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
challenges <strong>nonsmooth</strong> opt. MATLAB tools The End<br />
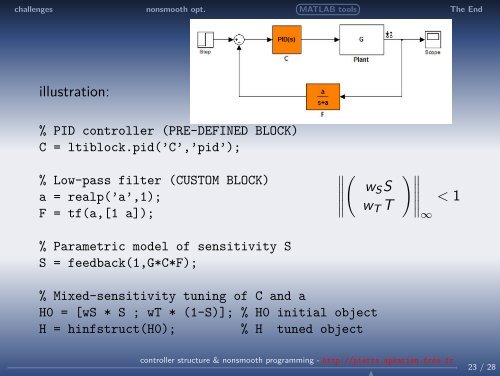
illustration:<br />
% PID <strong>controller</strong> (PRE-DEFINED BLOCK)<br />
C = ltiblock.pid(’C’,’pid’);<br />
% Low-pass filter (CUSTOM BLOCK)<br />
a = realp(’a’,1);<br />
F = tf(a,[1 a]);<br />
% Parametric model of sensitivity S<br />
S = feedback(1,G*C*F);<br />
( wS S<br />
∥ w T T<br />
)∥ ∥∥∥∥∞<br />
< 1<br />
% Mixed-sensitivity tuning of C and a<br />
H0 = [wS * S ; wT * (1-S)]; % H0 initial object<br />
H = hinfstruct(H0); % H tuned object<br />
<strong>controller</strong> <strong>structure</strong> & <strong>nonsmooth</strong> <strong>programming</strong> - http://pierre.apkarian.free.fr<br />
<br />
23 / 28