controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
challenges <strong>nonsmooth</strong> opt. MATLAB tools The End<br />
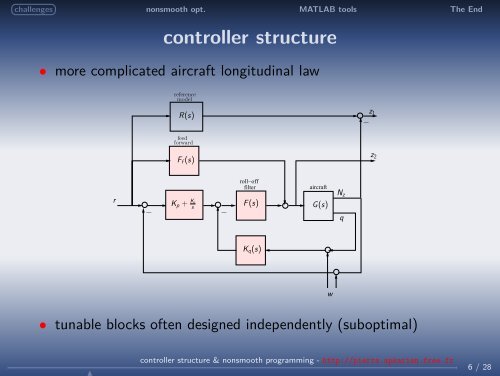
<strong>controller</strong> <strong>structure</strong><br />
• more complicated aircraft longitudinal law<br />
reference<br />
model<br />
R(s)<br />
z 1<br />
−<br />
feed<br />
forward<br />
F f (s)<br />
z 2<br />
r<br />
−<br />
K p + Ki<br />
s<br />
−<br />
roll−off<br />
filter<br />
F (s)<br />
aircraft<br />
G(s)<br />
N z<br />
q<br />
K q(s)<br />
w<br />
• tunable blocks often designed independently (suboptimal)<br />
<br />
<strong>controller</strong> <strong>structure</strong> & <strong>nonsmooth</strong> <strong>programming</strong> - http://pierre.apkarian.free.fr<br />
6 / 28