controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
challenges <strong>nonsmooth</strong> opt. MATLAB tools The End<br />
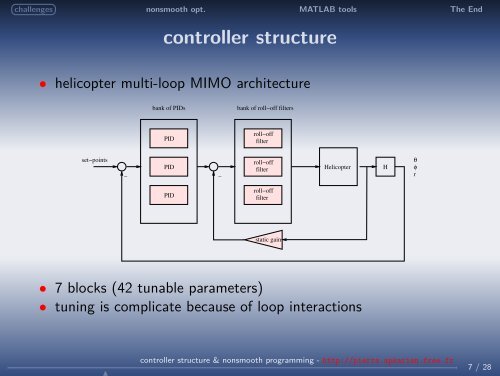
<strong>controller</strong> <strong>structure</strong><br />
• helicopter multi-loop MIMO architecture<br />
bank of PIDs<br />
bank of roll−off filters<br />
PID<br />
roll−off<br />
filter<br />
set−points<br />
_<br />
PID<br />
_<br />
roll−off<br />
filter<br />
Helicopter<br />
H<br />
θ<br />
φ<br />
r<br />
PID<br />
roll−off<br />
filter<br />
static gain<br />
• 7 blocks (42 tunable parameters)<br />
• tuning is complicate because of loop interactions<br />
<br />
<strong>controller</strong> <strong>structure</strong> & <strong>nonsmooth</strong> <strong>programming</strong> - http://pierre.apkarian.free.fr<br />
7 / 28