controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
challenges <strong>nonsmooth</strong> opt. MATLAB tools The End<br />
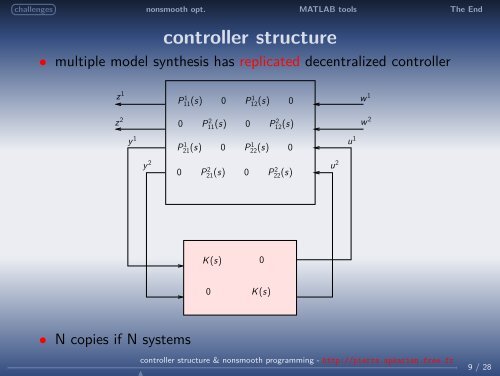
<strong>controller</strong> <strong>structure</strong><br />
• multiple model synthesis has replicated decentralized <strong>controller</strong><br />
z 1<br />
P 1 11(s) 0 P 1 12(s) 0<br />
w 1<br />
z 2 0 P11(s) 2 0 P12(s)<br />
2 w 2<br />
y 1 u 1<br />
P21(s) 1 0 P22(s) 1 0<br />
y 2<br />
0 P 2 21(s) 0 P 2 22(s)<br />
u 2<br />
K(s) 0<br />
0<br />
K(s)<br />
• N copies if N systems<br />
<strong>controller</strong> <strong>structure</strong> & <strong>nonsmooth</strong> <strong>programming</strong> - http://pierre.apkarian.free.fr<br />
<br />
9 / 28