controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free
controller structure & nonsmooth programming - Pierre Apkarian - Free

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
challenges <strong>nonsmooth</strong> opt. MATLAB tools The End<br />
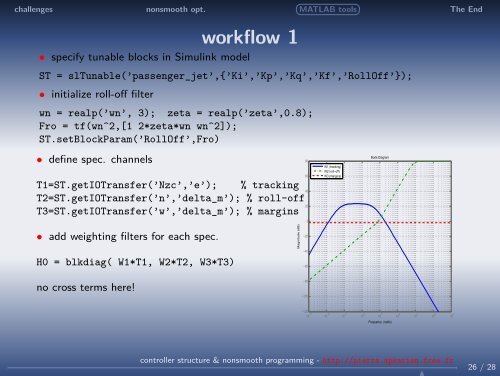
workflow 1<br />
• specify tunable blocks in Simulink model<br />
ST = slTunable(’passenger_jet’,{’Ki’,’Kp’,’Kq’,’Kf’,’RollOff’});<br />
• initialize roll-off filter<br />
wn = realp(’wn’, 3); zeta = realp(’zeta’,0.8);<br />
Fro = tf(wn^2,[1 2*zeta*wn wn^2]);<br />
ST.setBlockParam(’RollOff’,Fro)<br />
• define spec. channels<br />
T1=ST.getIOTransfer(’Nzc’,’e’); % tracking<br />
T2=ST.getIOTransfer(’n’,’delta_m’); % roll-off<br />
T3=ST.getIOTransfer(’w’,’delta_m’); % margins<br />
• add weighting filters for each spec.<br />
H0 = blkdiag( W1*T1, W2*T2, W3*T3)<br />
Magnitude (dB)<br />
80<br />
60<br />
40<br />
20<br />
0<br />
−20<br />
−40<br />
−60<br />
W1 (tracking)<br />
W2 (roll−off)<br />
W3 (margins)<br />
Bode Diagram<br />
no cross terms here!<br />
−80<br />
−100<br />
−120<br />
10 −3 10 −2 10 −1 10 0 10 1 10 2 10 3 10 4 10 5<br />
Frequency (rad/s)<br />
<strong>controller</strong> <strong>structure</strong> & <strong>nonsmooth</strong> <strong>programming</strong> - http://pierre.apkarian.free.fr<br />
<br />
26 / 28