A MATLAB Script for Earth-to-Mars Mission Design - Orbital and ...
A MATLAB Script for Earth-to-Mars Mission Design - Orbital and ...
A MATLAB Script for Earth-to-Mars Mission Design - Orbital and ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
In this <strong>MATLAB</strong> script the heliocentric coordinates of the Moon, planets <strong>and</strong> sun are based on the JPL<br />
Development Ephemeris DE421. These coordinates are evaluated in the <strong>Earth</strong> mean equa<strong>to</strong>r <strong>and</strong><br />
equinox of J2000 coordinate system (EME2000).<br />
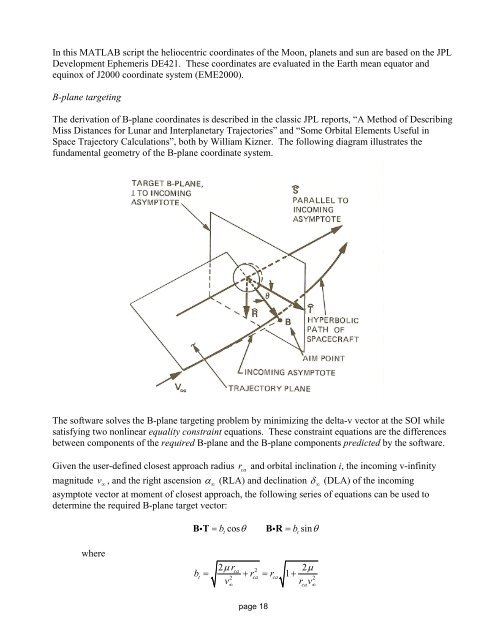
B-plane targeting<br />
The derivation of B-plane coordinates is described in the classic JPL reports, “A Method of Describing<br />
Miss Distances <strong>for</strong> Lunar <strong>and</strong> Interplanetary Trajec<strong>to</strong>ries” <strong>and</strong> “Some <strong>Orbital</strong> Elements Useful in<br />
Space Trajec<strong>to</strong>ry Calculations”, both by William Kizner. The following diagram illustrates the<br />
fundamental geometry of the B-plane coordinate system.<br />
The software solves the B-plane targeting problem by minimizing the delta-v vec<strong>to</strong>r at the SOI while<br />
satisfying two nonlinear equality constraint equations. These constraint equations are the differences<br />
between components of the required B-plane <strong>and</strong> the B-plane components predicted by the software.<br />
Given the user-defined closest approach radius r ca <strong>and</strong> orbital inclination i, the incoming v-infinity<br />
magnitude v� , <strong>and</strong> the right ascension �� (RLA) <strong>and</strong> declination � � (DLA) of the incoming<br />
asymp<strong>to</strong>te vec<strong>to</strong>r at moment of closest approach, the following series of equations can be used <strong>to</strong><br />
determine the required B-plane target vec<strong>to</strong>r:<br />
where<br />
BT � � b cos� BR � � b sin�<br />
t t<br />
2�r2� b � �r � r 1�<br />
ca 2<br />
t 2<br />
v� ca ca<br />
2<br />
rcav� page 18