V - PowerWorld
V - PowerWorld
V - PowerWorld

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
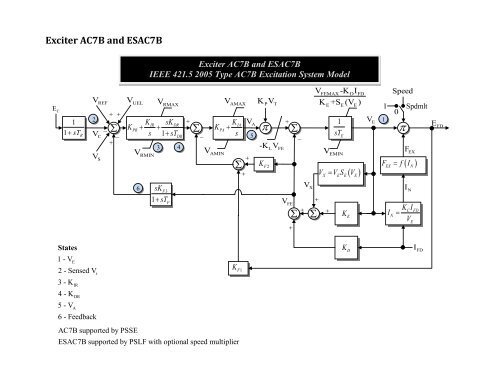
Exciter AC7B and ESAC7B<br />
Exciter AC7B and ESAC7B<br />
IEEE 421.5 2005 Type AC7B Excitation System Model<br />
E C<br />
1<br />
1+ sT R<br />
V REF<br />
2<br />
V C<br />
V S<br />
+ +<br />
Σ<br />
−<br />
−<br />
+<br />
V UEL V RMAX<br />
V AMAX<br />
K<br />
PR<br />
K<br />
+ +<br />
+<br />
IR DR<br />
Σ<br />
s<br />
+ IA<br />
K<br />
1 + PA<br />
+ π<br />
sTDR<br />
s<br />
−<br />
5<br />
3 4<br />
-K V<br />
L FE<br />
V RMIN<br />
sK<br />
V AMIN<br />
K<br />
V A<br />
Σ K F 2<br />
+<br />
+<br />
KV<br />
P<br />
T<br />
Σ<br />
−<br />
VFEMAX<br />
-K I<br />
K +S (V )<br />
E E E<br />
1<br />
sT E<br />
V EMIN<br />
( )<br />
V = VS V<br />
X E E E<br />
D FD<br />
V E<br />
Speed<br />
1 Spdmlt 0<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
6<br />
sK<br />
1+ sT<br />
F 3<br />
F<br />
V FE<br />
Σ<br />
+<br />
+<br />
V X<br />
+<br />
Σ<br />
+<br />
K E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - K<br />
4 - K<br />
5 - V<br />
IR<br />
DR<br />
A<br />
t<br />
6 - Feedback<br />
AC7B supported by PSSE<br />
ESAC7B supported by PSLF with optional speed multiplier<br />
K F1<br />
K D<br />
I FD
Exciter AC8B<br />
Exciter AC8B<br />
IEEE 421.5 2005 AC8B Excitation System<br />
V COMP<br />
VREF<br />
VS<br />
V PIDMAX<br />
V RMAX<br />
VFEMAX<br />
-K I<br />
K +S (V )<br />
E E E<br />
D FD<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
+<br />
+<br />
KIR<br />
sKDR<br />
K<br />
A<br />
Σ Σ K + PR<br />
s<br />
+ 1 + sT 1+ sT<br />
VUEL<br />
+<br />
+<br />
VOEL<br />
V PIDMIN<br />
3<br />
DR<br />
4<br />
V RMIN<br />
A<br />
5<br />
+<br />
V R<br />
Σ<br />
−<br />
V FE<br />
1<br />
sT E<br />
V EMIN<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
E FD<br />
N<br />
I N<br />
Σ<br />
+<br />
+<br />
( )<br />
K + S V<br />
E E E<br />
I<br />
N<br />
=<br />
KCI<br />
V<br />
E<br />
FD<br />
K D<br />
I FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - PID 1<br />
4 - PID 2<br />
5 - V<br />
R<br />
t<br />
Model supported by PSSE
Exciter BPA_EA<br />
Exciter BPA_EA<br />
Continuously Acting DC Rotating Excitation System Model<br />
Regulator<br />
V T<br />
Filter<br />
1<br />
1+ sT R<br />
2<br />
V STB<br />
+<br />
−<br />
+<br />
Σ<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
1+ sT<br />
A<br />
1<br />
1+ sTA<br />
1<br />
V RMAX<br />
3 4<br />
+<br />
Σ<br />
−<br />
Exciter<br />
1<br />
sT E<br />
E FD<br />
1<br />
V RMIN<br />
V REF<br />
5<br />
Stabilizer<br />
sKF<br />
1+ sT<br />
F<br />
S<br />
E<br />
+ K<br />
E<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
R1<br />
t<br />
5 - VF<br />
Model in the public domain, available from BPA
Exciter BPA EB<br />
Exciter BPA EB<br />
Westinghouse Pre-1967 Brushless Excitation System Model<br />
Regulator<br />
Exciter<br />
V T<br />
Filter<br />
1<br />
1+ sT R<br />
2<br />
V STB<br />
+<br />
−<br />
+<br />
Σ<br />
V REF<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
1+ sT<br />
A<br />
Stabilizer<br />
1<br />
1+ sTA<br />
1<br />
V RMAX<br />
3 4<br />
V RMIN<br />
+<br />
Σ<br />
−<br />
S<br />
E<br />
1<br />
sT E<br />
+ K<br />
E<br />
1<br />
E FDMAX<br />
EFDMIN<br />
= 0<br />
E FD<br />
5<br />
sKF<br />
1+ sT<br />
F<br />
6<br />
1<br />
1+ sTF<br />
1<br />
States<br />
1 - E before limit<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
6 - V<br />
R<br />
R1<br />
F<br />
F1<br />
t<br />
Model in the public domain, available from BPA
Exciter BPA EC<br />
Exciter BPA EC<br />
Westinghouse Brushless Since 1966 Excitation System Model<br />
Regulator<br />
Exciter<br />
V STB<br />
V RMAX<br />
E FDMAX<br />
V T<br />
−<br />
V REF<br />
+<br />
+<br />
Σ<br />
+<br />
Σ<br />
−<br />
4<br />
K<br />
A<br />
1+ sT<br />
A<br />
Stabilizer<br />
sKF<br />
1+ sT<br />
F<br />
2<br />
V RMIN<br />
1<br />
1+ sTA<br />
1<br />
S<br />
E<br />
+ K<br />
3<br />
E<br />
+<br />
Σ<br />
−<br />
S<br />
E<br />
1<br />
sT E<br />
+ K<br />
E<br />
1<br />
EFDMIN<br />
= 0<br />
E FD<br />
States<br />
1 - E before limit<br />
2 - V<br />
3 - V<br />
4 - V<br />
FD<br />
R<br />
R1<br />
F<br />
Model in the public domain, available from BPA
Exciter BPA ED<br />
Exciter BPA ED<br />
SCPT Excitation System Model<br />
'<br />
V T<br />
1<br />
1+ sT R<br />
2<br />
V REF<br />
−<br />
+<br />
+<br />
Σ<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
1+ sT<br />
A<br />
Regulator<br />
1<br />
V RMAX<br />
3 4<br />
1+ sT V<br />
A1<br />
R<br />
V RMIN<br />
+<br />
Σ<br />
+<br />
V BMAX<br />
0<br />
Exciter<br />
V B<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
K E<br />
1<br />
E FD<br />
V S<br />
V T<br />
I T<br />
VTHEV = KPVT + jKI IT<br />
V THEV<br />
π<br />
5<br />
sKF<br />
1+ sT<br />
F<br />
Stabilizer<br />
⎛0.78⋅<br />
I ⎞<br />
FD<br />
A = ⎜ ⎟<br />
⎝ VTHEV<br />
⎠<br />
If A> 1, V = 0<br />
States<br />
1 - EField<br />
B<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
R<br />
t<br />
2<br />
I FD<br />
5 - Feedback<br />
Model in the public domain, available from BPA<br />
1−<br />
A
Exciter BPA EE<br />
Exciter BPA EE<br />
Non-Continuously Active Rheostatic Excitation System Model<br />
Regulator<br />
Exciter<br />
'<br />
V T<br />
−<br />
V REF<br />
+<br />
Σ<br />
+<br />
'<br />
K<br />
A<br />
1+<br />
sT<br />
V RMIN<br />
V RMAX<br />
RH<br />
∗<br />
V RH<br />
2<br />
If:<br />
∆V ≥ K , V = V<br />
T V R RMAX<br />
∆ V < K , V = V<br />
T V R RH<br />
∆V ≤− K , V = V<br />
T V R RMIN<br />
V R<br />
+<br />
Σ<br />
−<br />
S<br />
E<br />
1<br />
sT E<br />
+ K<br />
E<br />
1<br />
E FDMAX<br />
E FDMIN<br />
E FD<br />
'<br />
V T<br />
−<br />
'<br />
V TO<br />
+<br />
Σ<br />
∆V T<br />
* NOTE:<br />
If the time constant T is equal to<br />
RH<br />
'<br />
zero, this block is represented as K<br />
A<br />
/s<br />
States<br />
1 - EField before limit<br />
2 - V<br />
RH<br />
Model in the public domain, available from BPA
Exciter BPA EF<br />
Exciter BPA EF<br />
Westinghouse Continuous Acting Brushless Rotating Alternator<br />
Excitation System Model<br />
Regulator<br />
Exciter<br />
V SO<br />
V RMAX<br />
E FDMAX<br />
+<br />
V A(1 A)<br />
T − Σ Σ<br />
( T = R<br />
0)<br />
−<br />
s<br />
V REF<br />
+<br />
+<br />
3<br />
Stabilizer<br />
sKF<br />
1+ sT<br />
F<br />
K<br />
V RMIN<br />
+ sT<br />
S<br />
E<br />
+ K<br />
2<br />
E<br />
+<br />
Σ<br />
−<br />
S<br />
E<br />
1<br />
sT E<br />
+ K<br />
E<br />
1<br />
EFDMIN<br />
= 0<br />
E FD<br />
States<br />
1 - EField before limit<br />
2 - V<br />
R<br />
3 - VF<br />
Model in the public domain, available from BPA
Exciter BPA EG<br />
Exciter BPA EG<br />
SCR Equivalent Excitation System Model<br />
Regulator<br />
V REF<br />
V RMAX<br />
V T<br />
−<br />
+<br />
+<br />
Σ<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
1+ sT<br />
A<br />
2<br />
1<br />
1+ sTA<br />
1<br />
V R<br />
1<br />
E FD<br />
V RMIN<br />
V SO<br />
3<br />
sKF<br />
1+ sT<br />
F<br />
Stabilizer<br />
States<br />
1 - EField<br />
2 - V<br />
A<br />
3 - VF<br />
Model in the public domain, available from BPA
Exciter BPA EJ<br />
Exciter BPA EJ<br />
Westinghouse Static Grand Couple PP#3 Excitation System Model<br />
Regulator<br />
'<br />
V T<br />
V SO<br />
Filter<br />
+<br />
1 2<br />
1+ sT<br />
− Σ<br />
R<br />
+<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
1+ sT<br />
A<br />
3<br />
1<br />
1+ sTA<br />
1<br />
V RMAX<br />
1<br />
E FDMAX<br />
π<br />
E FD<br />
V REF<br />
V RMIN<br />
E FDMIN<br />
4<br />
Stabilizer<br />
sKF<br />
1+ sT<br />
F<br />
States<br />
1 - EField before limit<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
F<br />
t<br />
Model in the public domain, available from BPA
Exciter BPA EK<br />
Exciter BPA EK<br />
General Electric Alterrex Excitation System Model<br />
Regulator<br />
Exciter<br />
V SO<br />
V RMAX<br />
E FDMAX<br />
VT<br />
(T =0)<br />
R<br />
−<br />
+<br />
V REF<br />
+<br />
Σ<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
1+ sT<br />
4<br />
A<br />
2<br />
1<br />
1+ sTA<br />
1<br />
V RMIN<br />
Stabilizer<br />
sKF<br />
1+ sT<br />
F<br />
3<br />
+<br />
Σ<br />
−<br />
S<br />
E<br />
1<br />
sT E<br />
+ K<br />
E<br />
1<br />
EFDMIN<br />
= 0<br />
E FD<br />
States<br />
1 - EField before limit<br />
2 - V<br />
3 - V<br />
4 - V<br />
R<br />
R1<br />
F<br />
Model in the public domain, available from BPA
Exciter BPA FA<br />
Exciter BPA FA<br />
WSCC Type A (DC1) Excitation System Model<br />
V REF<br />
V S<br />
V RMAX<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
Σ<br />
V ERR<br />
+<br />
+<br />
Σ<br />
−<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
3<br />
K<br />
A<br />
1+ sT<br />
A<br />
V R<br />
4<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
E FD<br />
1<br />
V F<br />
V RMIN<br />
V FE<br />
S<br />
E<br />
+ K<br />
E<br />
5<br />
sKF<br />
1+ sT<br />
F<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
B<br />
R<br />
F<br />
t<br />
Model in the public domain, available from BPA
Exciter BPA FB<br />
Exciter BPA FB<br />
WSCC Type B (DC2) Excitation System Model<br />
V REF<br />
V S<br />
VV<br />
T<br />
RMAX<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
Σ<br />
V ERR<br />
+<br />
+<br />
Σ<br />
−<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
3<br />
K<br />
A<br />
1+ sT<br />
A<br />
V R<br />
4<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
E FD<br />
1<br />
V F<br />
VV<br />
T<br />
RMIN<br />
V FE<br />
S<br />
E<br />
+ K<br />
E<br />
5<br />
sKF<br />
1+ sT<br />
F<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
B<br />
R<br />
t<br />
5 - VF<br />
Model in the public domain, available from BPA
Exciter BPA FC<br />
Exciter BPA FC<br />
WSCC Type C (AC1) Excitation System Model<br />
V REF<br />
V T<br />
I T<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
Σ<br />
+<br />
V ERR<br />
V S<br />
V RMAX<br />
+<br />
+<br />
Σ<br />
−<br />
V F<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
4<br />
K<br />
A<br />
1+ sT<br />
V RMIN<br />
A<br />
3<br />
V R<br />
+<br />
Σ<br />
−<br />
0<br />
1<br />
sT E<br />
1<br />
V E<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
LL<br />
t<br />
5 - VF<br />
Model in the public domain, available from BPA<br />
5<br />
sKF<br />
1+ sT<br />
F<br />
V FE<br />
Σ<br />
+<br />
+<br />
K E<br />
K D<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter BPA FD<br />
Exciter BPA FD<br />
WSCC Type D (ST2) Excitation System Model<br />
V REF<br />
V T<br />
I T<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
Σ<br />
+<br />
V ERR<br />
V RMAX<br />
EFD MAX<br />
V S<br />
+<br />
+<br />
Σ<br />
−<br />
F<br />
V RMIN<br />
K<br />
A<br />
1+ sT<br />
A<br />
3<br />
+<br />
V 0<br />
V R<br />
V B<br />
Σ<br />
+<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
1<br />
E FD<br />
V T<br />
I T<br />
IFD<br />
VE = KPVT + jKIIT<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
E<br />
EX<br />
π<br />
( )<br />
F = f I<br />
Model in the public domain, available from BPA<br />
N<br />
4<br />
FEX<br />
sKF<br />
1+ sT<br />
F<br />
V If K = 0. and K = 0., V = 1.<br />
K E<br />
P I B<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
F<br />
t
Exciter BPA FE<br />
Exciter BPA FE<br />
WSCC Type E (DC3) Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V RMAX<br />
K V<br />
VERR<br />
RMAX RMIN<br />
V<br />
−V<br />
sK T<br />
V<br />
RH<br />
V RH<br />
3<br />
−K V<br />
V RMIN<br />
States<br />
1 - EField before limit<br />
2 - Sensed V<br />
3 - V<br />
RH<br />
t<br />
Model in the public domain, available from BPA<br />
If V ≥ K , V = V<br />
ERR V R RMAX<br />
If V < K , V = V<br />
ERR V R RH<br />
If V ≤− K , V = V<br />
ERR V R RMIN<br />
V R<br />
+<br />
V FE<br />
Σ<br />
−<br />
K<br />
E<br />
1<br />
sT E<br />
+ S<br />
E<br />
1<br />
E FD
Exciter BPA FF<br />
Exciter BPA FF<br />
WSCC Type F (AC2) Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V ERR<br />
V S<br />
V AMAX<br />
+<br />
Σ<br />
+<br />
4<br />
3<br />
+<br />
−<br />
V F<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
K<br />
A<br />
1+ sT<br />
V AMIN<br />
A<br />
−<br />
V A<br />
V H<br />
Σ<br />
V L<br />
LV<br />
Gate<br />
K B<br />
K L<br />
V RMIN<br />
V RMAX<br />
V R<br />
+<br />
Σ −<br />
+<br />
V LR<br />
Σ<br />
−<br />
0<br />
1<br />
sT E<br />
1<br />
V E<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
LL<br />
t<br />
sKF<br />
1+ sT<br />
5 - VF<br />
Model in the public domain, available from BPA<br />
5<br />
F<br />
K H<br />
Σ<br />
V FE<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
K D<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter BPA FG<br />
Exciter BPA FG<br />
WSCC Type G (AC4) Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V<br />
Σ<br />
ERR<br />
+<br />
+<br />
V S<br />
V IMIM<br />
V IMAX<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
K<br />
A<br />
1+ sT<br />
3 1<br />
A<br />
RMIN<br />
(V − K I )<br />
RMAX<br />
E FD<br />
(V − K I )<br />
C FD<br />
C FD<br />
States<br />
1 - EField before limit<br />
2 - Sensed V<br />
3 - V<br />
LL<br />
t<br />
Model in the public domain, available from BPA
Exciter BPA FH<br />
Exciter BPA FH<br />
WSCC Type H (AC3) Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V ERR<br />
V AMAX<br />
K LV<br />
Σ<br />
+<br />
−<br />
1+<br />
sT 4<br />
C HV K<br />
A<br />
+<br />
+ Σ<br />
π<br />
1+<br />
sT Gate<br />
Σ<br />
B<br />
1+ sT V<br />
V + A V A R<br />
−<br />
S<br />
V F<br />
V AMIN<br />
3<br />
K R<br />
V LV<br />
−<br />
V FE<br />
0<br />
1<br />
sT E<br />
V E<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
LL<br />
t<br />
s<br />
+ sT<br />
1<br />
F<br />
5 - VF<br />
Model in the public domain, available from BPA<br />
5<br />
V N K N<br />
K F<br />
E FDN<br />
EFD<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
K D<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter BPA FH<br />
Exciter BPA FH<br />
WSCC Type H Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V ERR<br />
V AMAX<br />
1+<br />
sT 4<br />
C<br />
K 3<br />
A<br />
+<br />
+ Σ<br />
π<br />
1+<br />
sT<br />
Σ<br />
B<br />
1+ sT V<br />
V + A V A R<br />
−<br />
S<br />
V F<br />
V AMIN<br />
K R<br />
−<br />
1<br />
sT E<br />
V EMIN<br />
V FE<br />
V E<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
LL<br />
t<br />
s<br />
+ sT<br />
1<br />
F<br />
5 - VF<br />
Model in the public domain, available from BPA<br />
5<br />
V N K N<br />
K F<br />
E FDN<br />
EFD<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
K D<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter BPA FJ<br />
Exciter BPA FJ<br />
WSCC Type J Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V S<br />
V ERR<br />
+<br />
Σ<br />
+ −<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
3<br />
K<br />
A<br />
1+ sT<br />
V RMIN<br />
V RMAX<br />
A<br />
1<br />
(VT EFDMAX − KCI FD)<br />
E FD<br />
(VT EFDMIN − KCI FD)<br />
V F<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
States<br />
1 - EField before limit<br />
2 - Sensed V<br />
3 - V<br />
LL<br />
t<br />
4 - VF<br />
Model in the public domain, available from BPA
Exciter BPA FK<br />
Exciter BPA FK<br />
WSCC Type K (ST1) Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V<br />
ERR<br />
+<br />
Σ<br />
+ −<br />
V S<br />
V IMIM<br />
V IMAX<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
3<br />
K<br />
A<br />
1+ sT<br />
A<br />
1<br />
(VT VRMAX − KCI FD<br />
)<br />
E FD<br />
(VT VRMIN − KCI FD<br />
)<br />
V F<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
States<br />
1 - EField before limit<br />
2 - Sensed V<br />
3 - V<br />
LL<br />
t<br />
4 - VF<br />
Model in the public domain, available from BPA
Exciter BPA FL<br />
Exciter BPA FL<br />
WSCC Type L (ST3) Excitation System Model<br />
V REF<br />
V T<br />
IT<br />
V = V + ( R + jX ) I<br />
C T C C T<br />
V C 1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
V GMAX<br />
V ERR<br />
K G<br />
+<br />
V S<br />
+<br />
Σ<br />
+<br />
V IMAX<br />
KJ<br />
1<br />
1+<br />
sT<br />
+ sT<br />
C<br />
B<br />
V G V RMAX<br />
−<br />
3 +<br />
1<br />
V A<br />
Σ<br />
K<br />
A<br />
1+ sT<br />
A<br />
V R<br />
π<br />
E FDMAX<br />
E FD<br />
V IMIN<br />
V RMIN<br />
V B<br />
V REF<br />
V T<br />
I T<br />
( )<br />
V = KV+ jK+<br />
KX I<br />
E P T I P L T<br />
V E<br />
π<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
N<br />
FEX<br />
=<br />
jθ<br />
K P Ke<br />
P<br />
p<br />
States<br />
1 - V<br />
M<br />
2 - Sensed V<br />
3 - V<br />
LL<br />
t<br />
Model in the public domain, available from BPA
Exciter BPA FM through BPA FV<br />
Exciter BPA FM through BPA FV<br />
No block diagrams have been created
Exciter DC3A<br />
Exciter DC3A<br />
IEEE 421.5 2005 DC3A Excitation System Model<br />
V REF<br />
V RMAX<br />
E C<br />
1<br />
1+ sT R<br />
−<br />
Σ +<br />
K V<br />
VERR<br />
RMAX RMIN<br />
2 V RH 3<br />
V<br />
−V<br />
sK T<br />
V RH<br />
−K V<br />
V RMIN<br />
If V ≥ K , V = V<br />
ERR V R RMAX<br />
If V < K , V = V<br />
ERR V R RH<br />
If V ≤− K , V = V<br />
ERR V R RMIN<br />
V R<br />
+<br />
−<br />
Σ<br />
1<br />
sT E<br />
1<br />
V EMIN<br />
States<br />
1 - E FD<br />
2 – Sensed V t<br />
3 - V RH<br />
+<br />
Σ<br />
+<br />
V X<br />
X<br />
K E<br />
E<br />
( )<br />
V = EFD ⋅ S EFD<br />
Model supported by PSSE
Exciter DC4B<br />
VOEL<br />
(OEL=1)<br />
Exciter DC4B<br />
IEEE 421.5 2005 DC4B Excitation System Model<br />
Alternate OEL Inputs<br />
VOEL<br />
(OEL=2)<br />
E C<br />
1<br />
1+ sT R<br />
V REF<br />
2<br />
+ −<br />
−<br />
+<br />
Σ<br />
−<br />
V<br />
UEL<br />
(UEL=1)<br />
+<br />
V<br />
V F<br />
S<br />
Alternate UEL Inputs<br />
K<br />
V<br />
P<br />
+ KI<br />
sKD<br />
s<br />
+ 1 + sT<br />
RMIN<br />
V<br />
K<br />
RMAX<br />
D<br />
K<br />
3 4<br />
A<br />
V<br />
UEL<br />
(UEL=2)<br />
A<br />
HV<br />
Gate<br />
LV<br />
Gate<br />
V T<br />
VV<br />
T<br />
K<br />
A<br />
1+ sT<br />
VV<br />
T<br />
A<br />
RMIN<br />
RMAX<br />
V R<br />
5<br />
π Σ π<br />
+<br />
−<br />
+<br />
Σ<br />
+<br />
1<br />
sT E<br />
V EMIN<br />
( )<br />
V = VS V<br />
X E E E<br />
1<br />
Speed<br />
1 0 Spdmlt<br />
E FD<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - PID1<br />
4 - PID2<br />
5 - V<br />
R<br />
t<br />
6 - Feedback<br />
Model supported by PSSE<br />
Model supported by PSLF with optional speed multiplier<br />
6<br />
sKF<br />
1+ sT<br />
F<br />
K E
Exciter ESAC1A<br />
Exciter ESAC1A<br />
IEEE Type AC1A Excitation System Model<br />
E C<br />
+<br />
1 2 1+<br />
sT<br />
1+ sT − R<br />
Σ<br />
1+<br />
sT<br />
+<br />
V S<br />
−<br />
V<br />
V<br />
F<br />
REF<br />
C<br />
B<br />
4<br />
K<br />
A<br />
1+ sT<br />
V AMIN<br />
V AMAX<br />
A<br />
V UEL<br />
3<br />
HV<br />
Gate<br />
V OEL<br />
LV<br />
Gate<br />
V RMIN<br />
V RMAX<br />
+<br />
V R<br />
Σ<br />
−<br />
1<br />
sT E<br />
0<br />
( )<br />
V = VS V<br />
X E E E<br />
1<br />
V E<br />
Speed<br />
1 Spdmlt 0<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
LL<br />
t<br />
5<br />
sKF<br />
1+ sT<br />
5 - VF<br />
Model supported by PSSE<br />
Model supported by PSLF with optional speed multiplier<br />
F<br />
Σ<br />
V<br />
V<br />
X<br />
FE<br />
+<br />
+<br />
+<br />
Σ<br />
+<br />
K E<br />
K D<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter ESAC2A<br />
Exciter ESAC2A<br />
IEEE Type AC2A Excitation System Model<br />
EC<br />
VREF<br />
1<br />
1+sT<br />
R<br />
+<br />
−<br />
V S<br />
+<br />
1+sT<br />
4<br />
V AMAX<br />
3<br />
+<br />
VUEL<br />
K H<br />
sKF<br />
1+sT<br />
VOEL<br />
C<br />
A<br />
B<br />
1+sT<br />
K HV<br />
Σ 1+sT Σ<br />
Gate Gate Σ<br />
2<br />
B<br />
A V<br />
−<br />
A<br />
VR<br />
−<br />
V F<br />
V RMIN<br />
V V<br />
AMIN H<br />
States<br />
1 - VE<br />
2 - Sensed Vt<br />
3 - VA<br />
4 - VLL<br />
5 - VF<br />
Model supported by PSSE<br />
Model supported by PSLF with optional speed multiplier<br />
K<br />
5<br />
F<br />
LV<br />
V RMAX<br />
+<br />
−<br />
VFEMAX<br />
-K I<br />
K +S (V )<br />
+<br />
Σ<br />
Σ<br />
E E E<br />
0<br />
1<br />
sT<br />
E<br />
D FD<br />
V<br />
X=VES E(V E) F<br />
EX<br />
=f(I<br />
N<br />
)<br />
VX<br />
+<br />
+<br />
+<br />
V FE<br />
KE<br />
K D<br />
1<br />
V E<br />
Speed<br />
1 0<br />
Spdmlt<br />
π<br />
F EX<br />
I N<br />
KI<br />
I<br />
N<br />
= V<br />
E FD<br />
C FD<br />
E<br />
I FD
Exciter ESAC3A<br />
Exciter ESAC3A<br />
IEEE Type AC3A Excitation System Model<br />
K R<br />
E C<br />
V UEL<br />
V REF<br />
V AMAX<br />
2<br />
+<br />
1 V C<br />
1+<br />
sT<br />
1+ sT R<br />
− 1+<br />
sT<br />
HV<br />
C<br />
A<br />
Σ Gate Σ<br />
B 4<br />
1 + sTA<br />
+<br />
V AMIN<br />
V S<br />
V<br />
V FE<br />
F<br />
+<br />
−<br />
K<br />
3<br />
V<br />
A<br />
π<br />
+<br />
V<br />
R<br />
Σ<br />
−<br />
V EMIN<br />
VFEMAX<br />
-K I<br />
K +S (V )<br />
1<br />
sT E<br />
E E E<br />
( )<br />
V = VS V<br />
X E E E<br />
D FD<br />
1<br />
V E<br />
Speed<br />
1 Spdmlt 0<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
Σ<br />
+<br />
V X<br />
+<br />
+<br />
Σ<br />
+<br />
K E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
LL<br />
t<br />
5 - VF<br />
Model supported by PSSE<br />
Model supported by PSLF with optional speed multiplier<br />
5<br />
s<br />
+ sT<br />
1<br />
F<br />
V N<br />
V N<br />
K N<br />
K F<br />
EFD<br />
K D<br />
I FD
Exciter ESAC4A<br />
Exciter ESAC4A<br />
IEEE Type AC4A Excitation System Model<br />
V UEL<br />
E C<br />
V REF<br />
+<br />
1 2<br />
1+<br />
sT 3<br />
C<br />
HV<br />
K 1<br />
A<br />
1+ sT − R<br />
Σ<br />
1+<br />
sT<br />
Gate 1+ sT<br />
+<br />
V IMAX<br />
V<br />
RMAX<br />
V I<br />
B<br />
A<br />
V IMIN<br />
V RMIN<br />
-K I<br />
C IFD<br />
E FD<br />
V S<br />
States<br />
1 - EField before limit<br />
2 - Sensed V<br />
3 - V<br />
LL<br />
t<br />
Model supported by PSLF and PSSE<br />
PSSE uses nonwindup limit on E<br />
FD
Exciter ESAC5A<br />
Exciter ESAC5A<br />
IEEE Type AC5A Excitation System Model<br />
E C<br />
V REF<br />
V RMAX<br />
1<br />
1+ sT R<br />
V S<br />
+<br />
2<br />
−<br />
−<br />
+<br />
K<br />
A<br />
Σ<br />
1+ sT<br />
RMIN<br />
A<br />
3<br />
+<br />
V 0<br />
Σ<br />
−<br />
1<br />
sT E<br />
1<br />
E FD<br />
4 5<br />
sKF<br />
( 1+<br />
sTF3<br />
)<br />
( 1+ sT )( 1+<br />
sT )<br />
F1 F2<br />
V X<br />
+<br />
( )<br />
V = V ⋅ S V<br />
X E E E<br />
If T =0, then sT =0.<br />
F2<br />
F3<br />
Σ<br />
+<br />
K E<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
R<br />
t<br />
4 - Feedback 1<br />
5 - Feedback 2<br />
Model supported by PSLF and PSSE
Exciter ESAC6A<br />
Exciter ESAC6A<br />
IEEE Type AC6A Excitation System Model<br />
Speed<br />
E C<br />
V REF<br />
V UEL<br />
V AMAX<br />
1 2 K<br />
A<br />
1+<br />
sT<br />
3<br />
1+<br />
sT 4<br />
K<br />
C<br />
1+ sT −<br />
R<br />
Σ<br />
1+<br />
sT 1+<br />
sT<br />
V C<br />
V S<br />
+<br />
+<br />
+<br />
( )<br />
5<br />
A<br />
1+<br />
sT<br />
1+<br />
sT<br />
B<br />
V A<br />
+<br />
Σ<br />
−<br />
V R<br />
V<br />
T RMIN<br />
AMIN<br />
J<br />
H<br />
VV<br />
VV<br />
+<br />
Σ<br />
V HMAX<br />
V X<br />
K<br />
V H Σ<br />
H<br />
− + V FE<br />
+<br />
0 V FELIM<br />
T<br />
RMAX<br />
−<br />
Σ<br />
+<br />
1<br />
sT E<br />
0<br />
+<br />
Σ<br />
K E<br />
( )<br />
V = VS V<br />
X E E E<br />
+<br />
1<br />
V E<br />
1 0<br />
Spdmlt<br />
EX<br />
π<br />
( )<br />
F = f I<br />
I<br />
N<br />
F EX<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
E FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - T Block<br />
A<br />
4 - V<br />
5 - V<br />
LL<br />
F<br />
t<br />
Model supported by PSSE<br />
Model supported by PSLF with optional speed multiplier<br />
K D<br />
I FD
Exciter ESAC8B_GE<br />
Exciter ESAC8B_GE<br />
IEEE Type AC8B with Added Speed Multiplier.<br />
V COMP<br />
1<br />
1+ sT R<br />
2<br />
−<br />
K<br />
V<br />
PR<br />
REF<br />
V RMAX<br />
+<br />
3<br />
K<br />
A<br />
Σ<br />
s + Σ<br />
1+ sT<br />
+<br />
K IR<br />
+<br />
+<br />
A<br />
5<br />
+<br />
V R<br />
Σ<br />
−<br />
VFEMAX<br />
-K I<br />
K +S (V )<br />
E E E<br />
1<br />
sT E<br />
D FD<br />
1<br />
Speed<br />
1 Spdmlt 0<br />
π<br />
F EX<br />
E FD<br />
V S<br />
sK<br />
1+ sT<br />
DR<br />
DR<br />
4<br />
V RMIN<br />
V FE<br />
V EMIN<br />
EX<br />
( )<br />
F = f I<br />
N<br />
I N<br />
Σ<br />
+<br />
+<br />
( )<br />
K + S V<br />
E E E<br />
I<br />
N<br />
=<br />
KCI<br />
V<br />
E<br />
FD<br />
K D<br />
I FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
t<br />
3 - PID 1<br />
4 - PID 2<br />
5 - VR<br />
Model supported by PSLF<br />
If V 0, V = V V and V = V V<br />
TMULT RMAX T RMAX RMIN T RMIN
Exciter ESAC8B_PTI<br />
Exciter ESAC8B_PTI<br />
Basler DECS Model<br />
K PR<br />
V REF<br />
V RMAX<br />
V C<br />
1<br />
1+ sT R<br />
V S<br />
2<br />
−<br />
+<br />
+<br />
Σ<br />
K IR<br />
s<br />
sKDR<br />
1+ sT<br />
D<br />
+<br />
4 5 +<br />
1<br />
+<br />
3<br />
Σ<br />
+<br />
K<br />
A<br />
1+ sT<br />
RMIN<br />
A<br />
V R<br />
Σ<br />
V 0<br />
−<br />
X<br />
1<br />
sT E<br />
E<br />
( )<br />
V = EFD ⋅ S EFD<br />
E FD<br />
V X<br />
+<br />
Σ<br />
+<br />
K E<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - Derivative Controller<br />
4 - Integral Controller<br />
5 - V<br />
R<br />
t<br />
Model supported by PSSE
Exciter ESDC1A<br />
Exciter ESDC1A<br />
IEEE Type DC1A Excitation System Model<br />
V REF<br />
V UEL<br />
V RMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
V C<br />
V S<br />
−<br />
+<br />
+<br />
1+<br />
sTC<br />
HV<br />
K<br />
A<br />
Σ<br />
1+<br />
sT Gate 1+ sT<br />
−<br />
VF<br />
B<br />
5<br />
V RMIN<br />
A<br />
3<br />
V R<br />
+<br />
VFE<br />
Σ<br />
−<br />
X<br />
1<br />
sT E<br />
0<br />
E<br />
( )<br />
V = EFD ⋅ S EFD<br />
1<br />
E FD<br />
V X<br />
+<br />
4<br />
sKF<br />
1+ sT<br />
F1<br />
Σ<br />
+<br />
K E<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
F<br />
t<br />
5 - Lead-Lag<br />
Model supported by PSSE<br />
Model supported by PSLF includes spdmlt, exclim, and UEL inputs that are read but not utilized in the Simulator implementation
Exciter ESDC2A<br />
Exciter ESDC2A<br />
IEEE Type DC2A Excitation System Model<br />
V REF<br />
V UEL<br />
VV<br />
T<br />
RMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
V C<br />
V S<br />
−<br />
+<br />
+<br />
1+<br />
sTC<br />
HV<br />
K<br />
A<br />
Σ<br />
1+<br />
sT Gate 1+ sT<br />
−<br />
B<br />
5<br />
VV<br />
T<br />
RMIN<br />
A<br />
3 +<br />
V R<br />
Σ<br />
−<br />
1<br />
sT E<br />
1<br />
E FD<br />
V F<br />
V FE<br />
X<br />
E<br />
( )<br />
V = EFD ⋅ S EFD<br />
V X<br />
+<br />
Σ<br />
+<br />
K E<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
F<br />
t<br />
sKF<br />
1+ sT<br />
5 - Lead-Lag<br />
Model supported by PSSE<br />
Model supported by PSLF includes spdmlt, exclim, and UEL inputs that are read but not utilized in Simulator<br />
4<br />
F1
Exciter ESDC3A<br />
Exciter ESDC3A<br />
IEEE Type DC3A with Added Speed Multiplier<br />
V REF<br />
V RMAX<br />
V C<br />
1<br />
1+ sT R<br />
1<br />
−<br />
+<br />
Σ<br />
V ERR<br />
−K V<br />
K V<br />
V<br />
−V<br />
sK T<br />
RMAX<br />
V<br />
RH<br />
RMIN<br />
V<br />
V RH<br />
RMIN<br />
If V ≥ K , V = V<br />
If V ≤− K , V = V<br />
Else V<br />
ERR V R RMAX<br />
ERR V R RMIN<br />
R<br />
= V<br />
RH<br />
3<br />
V R<br />
+<br />
V X<br />
−<br />
Σ<br />
X<br />
K<br />
E<br />
E<br />
1<br />
+ sT<br />
E<br />
( )<br />
V = EFD ⋅ S EFD<br />
2<br />
Speed<br />
1 Spdmlt 0<br />
π<br />
E FD<br />
If exclim 0 then 0 else unlimited<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
RH<br />
t<br />
Model supported by PSLF
Exciter ESST1A<br />
Exciter ESST1A<br />
IEEE Type ST1A Excitation System Model<br />
VUEL<br />
(UEL=1)<br />
Alternate<br />
UEL Inputs<br />
VUEL<br />
(UEL=3)<br />
E C<br />
1<br />
1+ sT R<br />
V REF<br />
VS<br />
(VOS=1)<br />
+<br />
2<br />
−<br />
+<br />
Σ<br />
−<br />
+<br />
V IMIN<br />
V IMAX<br />
VUEL<br />
(UEL=2)<br />
V I<br />
HV<br />
Gate<br />
Alternate<br />
Stabilizer<br />
Inputs<br />
( 1+ sTC)( 1+<br />
sTC1<br />
)<br />
( 1+ sT )( 1+<br />
sT )<br />
B<br />
B1<br />
3 4<br />
K<br />
A<br />
1+ sT<br />
V AMIN<br />
V AMAX<br />
A<br />
VS<br />
(VOS=2)<br />
+<br />
1<br />
+<br />
V<br />
A<br />
Σ<br />
−<br />
HV<br />
Gate<br />
LV<br />
Gate<br />
VT VRMAX -K<br />
CIFD<br />
VV<br />
T<br />
RMIN<br />
EFD<br />
V OEL<br />
V F<br />
States<br />
1 - V<br />
A<br />
2 - Sensed V<br />
t<br />
3 - LL<br />
4 - LL1<br />
5 - Feedback<br />
Model supported by PSLF and PSSE<br />
5<br />
sKF<br />
1+ sT<br />
F<br />
0<br />
KLR<br />
I<br />
Σ FD<br />
+<br />
−<br />
I LR
Exciter ESST2A<br />
Exciter ESST2A<br />
IEEE Type ST2A Excitation System Model<br />
V UEL<br />
V REF<br />
V RMAX<br />
EFD MAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
V C<br />
V S<br />
+<br />
−<br />
+<br />
1+<br />
sTC<br />
HV K<br />
A<br />
Σ<br />
1+<br />
sT Gate 1+ sT<br />
−<br />
V 0<br />
F<br />
B<br />
V RMIN<br />
A<br />
3<br />
V R<br />
V B<br />
π<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
1<br />
E FD<br />
V T<br />
I T<br />
VE = KPVT + jKIIT<br />
E<br />
π<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
V If K = 0 and K = 0, V = 1<br />
K E<br />
P I B<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
N<br />
FEX<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
F<br />
t<br />
Model supported by PSSE<br />
Model supported by PSLF includes UEL input that is read but not utilized in Simulator
Exciter ESST3A<br />
Exciter ESST3A<br />
IEEE Type ST3A Excitation System Model<br />
V GMAX<br />
K G<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
V S<br />
+<br />
Σ<br />
+<br />
V IMAX<br />
V UEL<br />
V I<br />
HV<br />
Gate<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
−<br />
4 K 3<br />
+<br />
K 1<br />
VA<br />
A<br />
1+ sT<br />
V RMAX<br />
A<br />
V R<br />
V G<br />
Σ<br />
M<br />
1+ sT<br />
V MMAX<br />
M<br />
VM<br />
π<br />
EFD<br />
V IMIN<br />
V RMIN<br />
V MMIN<br />
V B<br />
V REF<br />
V BMAX<br />
V T<br />
I T<br />
( )<br />
V = KV+ jK+<br />
KX I<br />
E P T I P L T<br />
V E<br />
π<br />
K<br />
P<br />
=<br />
j P<br />
Ke θ<br />
P<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
N<br />
FEX<br />
States<br />
1 - V<br />
M<br />
2 - Sensed V<br />
3 - V<br />
R<br />
t<br />
4 - LL<br />
Model supported by PSLF and PSSE
Exciter ESST4B<br />
Exciter ESST4B<br />
IEEE Type ST4B Potential- or Compound-Source Controlled-Rectifier Exciter Model<br />
V S<br />
K G<br />
V UEL<br />
V COMP<br />
1<br />
1+ sT R<br />
2<br />
+ +<br />
−<br />
+<br />
Σ<br />
K<br />
PR<br />
V RMAX<br />
K<br />
+<br />
s<br />
IR<br />
−<br />
4 1 3<br />
+<br />
K 1<br />
V R<br />
1+ sTA<br />
Σ<br />
K<br />
PM<br />
+<br />
V MMAX<br />
IM<br />
s<br />
LV<br />
Gate<br />
π<br />
E FD<br />
V REF<br />
V RMIN<br />
V T<br />
I T<br />
( )<br />
V = KV + j K + K X I<br />
E P T I P L T<br />
V MMIN<br />
V E<br />
π<br />
V OEL<br />
V BMAX<br />
V B<br />
States<br />
1 - V<br />
M<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
R<br />
t<br />
K<br />
P<br />
=<br />
GMAX<br />
j P<br />
Ke θ<br />
P<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
Model supported by PSSE<br />
Model supported by PSLF includes V input that is read but not utilized in Simulator<br />
E<br />
FD<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
N<br />
FEX
Exciter EWTGFC<br />
Exciter EWTGFC<br />
Excitation Control Model for Full Converter GE Wind-Turbine Generators<br />
Reactive Power Control Model<br />
V C<br />
1<br />
1+ sT R<br />
V RFQ<br />
4 +<br />
+<br />
− 1<br />
1<br />
∑<br />
f N<br />
K IV<br />
s<br />
KPV<br />
1+ sT<br />
V<br />
5<br />
∑<br />
3 +<br />
Q MIN<br />
Q MAX<br />
1+ sTFV<br />
6<br />
P FAREF<br />
P elec<br />
1<br />
1+ sTP<br />
tan<br />
7<br />
π<br />
Q REF<br />
0<br />
1<br />
pfaflg<br />
Q REF<br />
0<br />
−1<br />
1<br />
Q MAX<br />
+<br />
Q gen<br />
−<br />
∑<br />
V MAX<br />
K QI<br />
s<br />
1<br />
V REF<br />
+<br />
−<br />
∑<br />
I QMAX<br />
K VI<br />
s<br />
I QCMD<br />
2<br />
varflg<br />
Q MIN<br />
V MIN<br />
V TERM<br />
I QMIN<br />
States<br />
1 - V<br />
2 - E<br />
3 - K<br />
4 - V<br />
5 - K<br />
6 - Q<br />
7 - P<br />
ref<br />
qppcmd<br />
PV<br />
regMeas<br />
IV<br />
ORD<br />
Meas<br />
Model supported by PSLF<br />
P ORD<br />
P elec<br />
−<br />
+<br />
∑<br />
+<br />
−<br />
pqflag<br />
∑<br />
÷<br />
V TERM<br />
K dbr<br />
I PMAX<br />
−<br />
1<br />
∑<br />
Converter Current Limit<br />
0<br />
+<br />
E<br />
0 BST<br />
1<br />
s<br />
I PCMD<br />
P dbr
Exciter EX2000<br />
Exciter EX2000<br />
IEEE Type AC7B Alternator-Rectifier Excitation System Model<br />
V RMAX<br />
V AMAX<br />
Field Current<br />
Limiter<br />
KP<br />
⋅ETRM<br />
V EMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
Reference<br />
Signal<br />
K<br />
s<br />
+<br />
IR<br />
IA<br />
Σ K Σ KPA<br />
+<br />
− PR<br />
+<br />
π Σ<br />
+<br />
−<br />
4<br />
V F<br />
V AMIN<br />
K<br />
s<br />
REF<br />
3<br />
V RMIN<br />
1st PI Controller<br />
2nd PI Controller<br />
V A<br />
Σ +<br />
+<br />
Minimum<br />
Gate 1<br />
K F 2<br />
−K V<br />
L<br />
+<br />
FE<br />
V FE<br />
−<br />
V X<br />
1<br />
sT E<br />
V EMIN<br />
( )<br />
V = VS V<br />
X E E E<br />
1<br />
V E<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
E<br />
E FD<br />
If field current limiter is included, V<br />
EMAX<br />
is off.<br />
V<br />
FEMAX D FD<br />
If field current limiter is excluded, V<br />
EMAX<br />
= K<br />
E +S<br />
E (V<br />
E )<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
API<br />
RPI<br />
5 - LL<br />
t<br />
6 - IFD<br />
PI<br />
Model supported by PSSE<br />
-K I<br />
K F1<br />
Σ<br />
+<br />
+<br />
+<br />
Σ<br />
+<br />
K E<br />
K D<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter EX2000 REFERENCE SIGNAL MODEL<br />
Exciter EX2000 Reference Signal Model<br />
Frequency<br />
KVHZ<br />
Q ELEC<br />
SBASE<br />
Machine MVA BASE<br />
1<br />
ETERM<br />
Reactive<br />
Current<br />
KRCC<br />
V REF<br />
V UEL<br />
+<br />
+<br />
+<br />
Σ<br />
−<br />
Minimum<br />
Gate 2<br />
REF LIMP<br />
REF<br />
V STB<br />
Reference Signal Model<br />
Model supported by PSSE
Exciter EX2000 FIELD CURRENT LIMITER MODEL<br />
Exciter EX2000 Field Current Limiter Model<br />
IFD REF1<br />
Level<br />
Detector<br />
Output =1 if level exceeded<br />
Latch<br />
Gate 1<br />
Inverse Timing<br />
OR<br />
IFD REF2<br />
( I1, T1)<br />
( I2, T2)<br />
( I3, T3)<br />
( I4, T4)<br />
Output =1 if<br />
timing expired<br />
Latch<br />
Gate 2<br />
IFD LIMP<br />
I FD<br />
IFD REF3<br />
IFD REF4<br />
A<br />
B<br />
C<br />
D<br />
+<br />
Σ<br />
−<br />
KIIFD<br />
KPIFD +<br />
s<br />
IFD LIMN<br />
3rd PI Controller<br />
6<br />
A<br />
B<br />
C<br />
D<br />
To<br />
Minimum<br />
Gate 1<br />
1+<br />
sT<br />
1+<br />
sT<br />
LEAD<br />
LAG<br />
5<br />
IFD ADVLIM<br />
Advance Limit<br />
Switch Operation<br />
Output D = B if C =0<br />
Output D = A if C=1<br />
Model supported by PSSE<br />
Field Current Limiter Model<br />
(Over Excitation Limiter)
Exciter EXAC1<br />
Exciter EXAC1<br />
IEEE Type AC1 Excitation System Model<br />
V REF<br />
V S<br />
V RMAX<br />
E C<br />
2<br />
1 −<br />
1+<br />
sT<br />
1+ sT R<br />
Σ + Σ<br />
1+<br />
sT<br />
V C<br />
+<br />
+<br />
−<br />
V F<br />
C<br />
B<br />
4<br />
K<br />
A<br />
1+ sT<br />
V RMIN<br />
A<br />
3<br />
+<br />
V R<br />
Σ<br />
−<br />
0<br />
1<br />
sT E<br />
1<br />
V E<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
R<br />
LL<br />
F<br />
t<br />
5<br />
sKF<br />
1+ sT<br />
Model supported by PSSE<br />
Model supported by PSLF also uses V<br />
AMIN<br />
and V<br />
AMAX<br />
Simulator will narrow the limit range as appropriate when loading the DYD file<br />
If VAMIN > V<br />
RMIN<br />
then VRMIN = VAMIN<br />
If VAMAX<br />
< V<br />
RMAX<br />
then VRMAX = VAMAX<br />
Model supported by PSLF includes speed multiplier that is not implemented in Simulator<br />
F<br />
Σ<br />
V FE<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
K D<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter EXAC1A<br />
Exciter EXAC1A<br />
Modified Type AC1 Excitation System Model<br />
V REF<br />
V S<br />
V RMAX<br />
E C<br />
2<br />
1 −<br />
1+<br />
sT<br />
1+ sT R<br />
Σ + Σ<br />
1+<br />
sT<br />
V C<br />
+<br />
+<br />
−<br />
V F<br />
C<br />
B<br />
4<br />
V RMIN<br />
K<br />
A<br />
1+ sT<br />
A<br />
3 +<br />
V R<br />
Σ<br />
−<br />
0<br />
1<br />
sT E<br />
1<br />
V E<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
V FE<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
K D<br />
I FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
R<br />
LL<br />
F<br />
t<br />
sKF<br />
1+ sT<br />
Model supported by PSSE<br />
Model supported by PSLF includes speed multiplier that is not implemented in Simulator<br />
5<br />
F
Exciter EXAC2<br />
Exciter EXAC2<br />
IEEE Type AC2 Excitation System Model<br />
V REF<br />
V S<br />
V AMAX<br />
EC<br />
+ +<br />
4<br />
3<br />
2<br />
1 − + 1+<br />
sTC<br />
K<br />
A<br />
1+ sT R<br />
Σ Σ<br />
1+<br />
sT 1+ sT<br />
V C<br />
−<br />
V F<br />
B<br />
V AMIN<br />
A<br />
+<br />
V A<br />
Σ<br />
−<br />
V H<br />
V L<br />
LV<br />
Gate<br />
K B<br />
V RMIN<br />
K L<br />
V RMAX<br />
V R<br />
+<br />
Σ −<br />
+<br />
V LR<br />
Σ<br />
−<br />
0<br />
1<br />
sT E<br />
V E<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
5<br />
sKF<br />
1+ sT<br />
F<br />
K H<br />
Σ<br />
V FE<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
A<br />
LL<br />
F<br />
t<br />
Model supported by PSSE<br />
Model supported by PSLF includes speed multiplier that is not implemented in Simulator<br />
K D<br />
I FD
Exciter EXAC3<br />
Exciter EXAC3<br />
IEEE Type AC3 Excitation System Model<br />
V REF<br />
V S<br />
V AMAX<br />
K LV<br />
Σ<br />
+<br />
−<br />
V FEMAX<br />
E C<br />
1 2<br />
−<br />
1+<br />
sT<br />
1+ sT R<br />
Σ Σ<br />
1+<br />
sT<br />
VC<br />
+<br />
+<br />
+<br />
−<br />
V F<br />
C<br />
B<br />
4<br />
HV<br />
Gate<br />
V AMIN<br />
K<br />
A<br />
1+ sT<br />
A<br />
3<br />
V<br />
A<br />
π<br />
+<br />
V R<br />
Σ<br />
V LV<br />
−<br />
K R<br />
V FE<br />
0<br />
1<br />
sT E<br />
V E<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
5<br />
s<br />
+ sT<br />
1<br />
F<br />
V N K N<br />
K F<br />
EFD N<br />
EFD<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
K D<br />
I FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
A<br />
LL<br />
F<br />
t<br />
Model supported by PSSE<br />
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
Exciter EXAC3A<br />
Exciter EXAC3A<br />
IEEE Type AC3 Excitation System Model<br />
K R<br />
V REF<br />
V AMAX<br />
VEMAX<br />
Speed<br />
E C<br />
+<br />
2<br />
1 1+<br />
sT 4<br />
−<br />
C<br />
1+ sT R 1+ sT + Σ<br />
V C<br />
Σ<br />
+<br />
V S<br />
B<br />
−<br />
K<br />
A<br />
1+ sT<br />
V AMIN<br />
A<br />
3<br />
V A<br />
π<br />
+<br />
V R<br />
V FE<br />
Σ<br />
−<br />
1<br />
sT E<br />
V EMIN<br />
V E<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
V F<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
LL<br />
t<br />
5 - VF<br />
Model supported by PSLF<br />
5<br />
s<br />
+ sT<br />
1<br />
F<br />
V N K N<br />
K F<br />
EFD N<br />
EFD<br />
K D<br />
I FD<br />
V =<br />
FEMAX<br />
V =<br />
V<br />
EMAX<br />
EMIN<br />
V<br />
= F<br />
( K V +V +V -V -V )<br />
L1 C S REF C F<br />
FA<br />
( V -K I )<br />
LV<br />
EX<br />
FEMAX<br />
S +K<br />
E<br />
D FD<br />
E<br />
K<br />
K<br />
L1
Exciter EXAC4<br />
Exciter EXAC4<br />
IEEE Type AC4 Excitation System Model<br />
E C<br />
V REF<br />
+<br />
V S<br />
1 2 −<br />
1+<br />
sT<br />
1+ sT R<br />
Σ Σ<br />
1+<br />
sT<br />
+<br />
V ERR<br />
+<br />
V IMIN<br />
V IMAX<br />
C<br />
B<br />
K<br />
A<br />
1+ sT<br />
3 1<br />
A<br />
V<br />
V<br />
RMIN<br />
RMAX<br />
-K I<br />
-K I<br />
C IFD<br />
C IFD<br />
E FD<br />
States<br />
1 - EField before limit<br />
2 - Sensed V<br />
3 - V<br />
LL<br />
t<br />
Model supported by PSLF and PSSE
Exciter EXAC6A<br />
Exciter EXAC6A<br />
IEEE Type AC6A Excitation System Model<br />
E C<br />
VV<br />
T<br />
2<br />
+<br />
1 − K<br />
1+<br />
sT<br />
A(1 + sT ) 3 4<br />
k<br />
C<br />
+<br />
1+ sT R<br />
Σ<br />
1+<br />
sT 1+ sT Σ<br />
A<br />
B<br />
V A V R<br />
+<br />
−<br />
VV<br />
V S<br />
V REF<br />
V AMIN<br />
V AMAX<br />
T<br />
+<br />
RMIN<br />
RMAX<br />
Σ<br />
−<br />
0<br />
1<br />
sT E<br />
V E<br />
1<br />
EX<br />
Speed<br />
π<br />
( )<br />
F = f I<br />
F EX<br />
N<br />
E FD<br />
5<br />
1+<br />
sT<br />
1+<br />
sT<br />
J<br />
H<br />
V HMAX<br />
V H<br />
0<br />
K H<br />
Σ<br />
+<br />
−<br />
V FELIM<br />
Σ<br />
+<br />
+<br />
V FE<br />
K<br />
E<br />
+ S<br />
KD<br />
E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
IFD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - T Block<br />
A<br />
4 - V<br />
LL<br />
t<br />
5 - VF<br />
Model supported by PSLF
Exciter EXAC8B<br />
Exciter EXAC8B<br />
Brushless Exciter with PID Voltage Regulator<br />
K VP<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
V REF<br />
Σ<br />
+<br />
-V IMAX<br />
V S<br />
V IMAX<br />
K VI<br />
s<br />
sKVD<br />
1+ sT<br />
VD<br />
5<br />
+<br />
4<br />
+<br />
Σ<br />
+<br />
1<br />
1+ sTA<br />
V RMIN<br />
V RMAX<br />
3<br />
+<br />
Σ<br />
Σ<br />
−<br />
+<br />
+<br />
0<br />
K<br />
1<br />
sT E<br />
E<br />
+ S<br />
E<br />
V E<br />
1<br />
EX<br />
π<br />
( )<br />
F = f I<br />
I<br />
N<br />
Speed<br />
F EX<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
E FD<br />
V FE<br />
KD<br />
IFD<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
R<br />
t<br />
4 - Derivative<br />
5 - Integral<br />
Model supported by PSLF
Exciter EXBAS<br />
Exciter EXBAS<br />
Basler Static Voltage Regulator Feeding DC or AC Rotating Exciter Model<br />
E C<br />
V REF V STB<br />
4 5<br />
+<br />
2 +<br />
1 − +<br />
KI<br />
1+<br />
sTC<br />
1+ sT R<br />
Σ Σ KP<br />
+<br />
s 1+<br />
sT<br />
+ +<br />
−<br />
B<br />
K<br />
A<br />
1+ sT<br />
V RMIN<br />
V UEL V OEL<br />
V RMAX<br />
A<br />
3<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
V E<br />
1<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
7<br />
sKF<br />
1+ sT<br />
F<br />
6<br />
1+<br />
sT<br />
1+<br />
sT<br />
F1<br />
F 2<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD<br />
K D<br />
States<br />
1 - V<br />
E<br />
2 - Sensed V<br />
3 - V<br />
R<br />
t<br />
4 - PI<br />
5 - LL<br />
6 - Feedback LL<br />
7 - Feedback<br />
Model supported by PSSE
Exciter EXBBC<br />
Exciter EXBBC<br />
Transformer-fed Excitation System<br />
V REF<br />
E C<br />
1<br />
1+ sTF<br />
− 1+<br />
sT<br />
Σ +<br />
+<br />
1<br />
+<br />
3<br />
+ sT<br />
Σ<br />
4<br />
+<br />
T2<br />
K T<br />
1<br />
V RMAX<br />
V RMIN<br />
1 ⎛T<br />
⎞<br />
1<br />
1<br />
⎜ −1⎟ K ⎝T ⎠ 1+<br />
sT<br />
2 2<br />
+<br />
Σ<br />
−<br />
1<br />
1+ sTE<br />
EE<br />
T<br />
EE<br />
T<br />
FDMIN<br />
FDMAX<br />
+<br />
Σ<br />
X E<br />
−<br />
I FD<br />
E FD<br />
Switch = 0<br />
Switch = 1<br />
Supplemental<br />
Signal<br />
Model supported by PSLF but not yet implemented in Simulator
Exciter EXDC1<br />
Exciter EXDC1<br />
IEEE DC1 Excitation System Model<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
V S<br />
+<br />
Σ<br />
+<br />
−<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
K<br />
A<br />
1+ sT<br />
V RMAX<br />
3 4<br />
+<br />
A<br />
V R<br />
Σ<br />
−<br />
1<br />
sT E<br />
Speed<br />
π<br />
E FD<br />
1<br />
V REF<br />
V F<br />
5<br />
sKF<br />
1+ sT<br />
F1<br />
V RMIN<br />
K<br />
E<br />
+ S<br />
E<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
B<br />
R<br />
F<br />
t<br />
Model supported by PSLF
Exciter EXDC2_GE<br />
Exciter EXDC2_GE<br />
IEEE Type DC2 Excitation System Model<br />
V comp<br />
V REF<br />
V S<br />
+<br />
+<br />
1 2<br />
−<br />
1+<br />
sT<br />
1+ sT R<br />
Σ<br />
1+<br />
sT<br />
−<br />
C<br />
B<br />
V<br />
K<br />
A<br />
1+ sT<br />
RMAX<br />
3 4<br />
V<br />
sK<br />
RMIN<br />
( 1+ sT )( 1+<br />
sT )<br />
F<br />
V<br />
T<br />
A<br />
F1 F2<br />
V<br />
T<br />
+<br />
Σ<br />
−<br />
K<br />
1<br />
1+ sTE<br />
E<br />
+ S<br />
E<br />
Speed<br />
π<br />
E FD<br />
1<br />
5<br />
6<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
6 - V<br />
B<br />
R<br />
F1<br />
F2<br />
t<br />
Model supported by PSLF
Exciter EXDC2_PTI<br />
Exciter EXDC2_PTI<br />
IEEE Type DC2 Excitation System Model<br />
V comp<br />
V REF V S<br />
+<br />
2<br />
1 −<br />
1+<br />
sT<br />
1+ sT R<br />
Σ + Σ<br />
1+<br />
sT<br />
V ERR<br />
+<br />
−<br />
5<br />
C<br />
B<br />
sKF<br />
1+ sT<br />
F1<br />
V<br />
K<br />
A<br />
1+ sT<br />
A<br />
RMAX<br />
3 4<br />
V<br />
RMIN<br />
V<br />
T<br />
V<br />
T<br />
+<br />
Σ<br />
−<br />
K<br />
1<br />
1+ sTE<br />
E<br />
+ S<br />
E<br />
Speed<br />
π<br />
E FD<br />
1<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
B<br />
R<br />
F<br />
t<br />
Model supported by PSEE
Exciter EXDC2A<br />
Exciter EXDC2A<br />
IEEE Type DC2 Excitation System Model<br />
E C<br />
1 2 − 1+<br />
sT<br />
1+ sT R<br />
Σ<br />
1+<br />
sT<br />
+<br />
+<br />
V REF<br />
V F<br />
V S<br />
−<br />
5<br />
C<br />
B<br />
sKF<br />
1+ sT<br />
3<br />
F1<br />
V<br />
V<br />
K<br />
A<br />
1+ sT<br />
RMIN<br />
A<br />
V<br />
RMAX<br />
T<br />
V<br />
T<br />
4<br />
+<br />
V R<br />
Σ<br />
−<br />
K<br />
E<br />
1<br />
sT E<br />
+ S<br />
E<br />
Speed<br />
π<br />
E FD<br />
1<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
B<br />
R<br />
F<br />
t<br />
Model supported by PSLF
Exciter EXDC4<br />
Exciter EXDC4<br />
IEEE Type 4 Excitation System Model<br />
E C<br />
V S<br />
V RMAX<br />
V REF<br />
1<br />
+<br />
− -K R<br />
1<br />
+<br />
Σ<br />
-1<br />
K R<br />
V RMIN<br />
sT RH<br />
2<br />
V RH<br />
V R<br />
+<br />
Σ<br />
−<br />
K<br />
E<br />
1<br />
+ sT<br />
E<br />
Speed<br />
π<br />
E FD<br />
1<br />
V RMAX<br />
π<br />
-K V<br />
S E<br />
K V<br />
V RMIN<br />
States<br />
1 - E<br />
2 - V<br />
FD<br />
RH<br />
Model supported by PSLF
Exciter EXELI<br />
Exciter EXELI<br />
Static PI Transformer Fed Excitation System Model<br />
K s1<br />
P GEN<br />
⎛ sTW<br />
⎜<br />
⎝1+<br />
sT<br />
4 5<br />
W<br />
3<br />
⎞<br />
⎟<br />
⎠<br />
6 Ks2<br />
7<br />
1+ sT<br />
s1<br />
+<br />
Σ<br />
+<br />
−sT<br />
1+<br />
sT<br />
s2<br />
s2<br />
8<br />
−S MAX<br />
S MAX<br />
E C<br />
2<br />
1<br />
+<br />
−<br />
1+ sT Σ V Σ<br />
FV<br />
PU<br />
States<br />
1 - T<br />
NU<br />
2 - Sensed V<br />
3 - Sensed I<br />
t<br />
FLD<br />
+<br />
4 - P Washout1<br />
GEN<br />
5 - P Washout2<br />
GEN<br />
V REF<br />
6 - P<br />
GEN<br />
Washout3<br />
7 - Lag Stabilizer<br />
8 - Washout Stabilizer<br />
Model supported by PSLF and PSSE<br />
+<br />
V PNF<br />
1<br />
sT NU<br />
D PNF<br />
1<br />
+<br />
+<br />
Σ<br />
−<br />
−<br />
Σ +<br />
3<br />
V PI<br />
1<br />
1+ sTFI<br />
+<br />
Σ<br />
X E<br />
−<br />
E FMIN<br />
I FD<br />
E FMAX<br />
E FD
Exciter EXPIC1<br />
Exciter EXPIC1<br />
Proportional/Integral Excitation System Model<br />
V REF<br />
V R1<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
E T<br />
+<br />
Σ<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
( 1+<br />
sT )<br />
s<br />
A1<br />
3<br />
V A<br />
( 1+<br />
sTA3<br />
)<br />
( 1+ sT )( 1+<br />
sT )<br />
A2 A4<br />
4 5<br />
V R<br />
V RMAX<br />
V RMIN<br />
π<br />
E FDMAX<br />
E FDMIN<br />
+<br />
E 0<br />
Σ<br />
−<br />
1<br />
sT E<br />
E FD<br />
1<br />
V S<br />
V R2<br />
sK<br />
( 1+ sT )( 1+<br />
sT )<br />
F<br />
F1 F2<br />
V B<br />
K<br />
E<br />
+ S<br />
E<br />
6 7<br />
V T<br />
I T<br />
VE = KPVT + jKIIT<br />
π<br />
States<br />
1 - E<br />
If KP = 0 and KI = 0, then VB<br />
= 1<br />
If T = 0, then EFD = E<br />
FD<br />
E<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
6 - V<br />
7 - V<br />
A<br />
R1<br />
R<br />
F1<br />
F<br />
t<br />
Model supported by PSLF and PSSE<br />
0<br />
I FD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
F EX<br />
N
Exciter EXST1_GE<br />
Exciter EXST1_GE<br />
IEEE Type ST1 Excitation System Model<br />
V comp<br />
VS<br />
+<br />
V<br />
REF<br />
+<br />
1 2<br />
1+<br />
sT<br />
1+ sT R −<br />
Σ<br />
1+<br />
sT<br />
−<br />
V IMIN<br />
V IMAX<br />
C<br />
B<br />
3<br />
1+<br />
sT<br />
1+<br />
sT<br />
C1<br />
B1<br />
K<br />
A<br />
1+ sT<br />
V AMAX<br />
5 1<br />
A<br />
+<br />
−<br />
Σ<br />
VT VRMAX -K<br />
CIIFD<br />
VT VRMIN -K<br />
CIIFD<br />
+<br />
Σ<br />
−<br />
E FD<br />
V AMIN<br />
X E<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
0<br />
K lr<br />
Σ<br />
−<br />
+<br />
I FD<br />
I lr<br />
States<br />
1 - V<br />
A<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
LL<br />
F<br />
LL1<br />
t<br />
Model supported by PSLF
Exciter EXST1_PTI<br />
Exciter EXST1_PTI<br />
IEEE Type ST1 Excitation System Model<br />
V REF<br />
V S<br />
E c<br />
+<br />
1 2<br />
1+<br />
sT<br />
1+ sT R<br />
Σ<br />
+ Σ<br />
−<br />
1+<br />
sT<br />
V ERR<br />
−<br />
+<br />
V IMIN<br />
V IMAX<br />
C<br />
B<br />
3<br />
K<br />
A<br />
1+ sT<br />
A<br />
1<br />
VT VRMAX -K<br />
CIIFD<br />
VT VRMIN -K<br />
CIIFD<br />
E FD<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
States<br />
1 - E before limit<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
LL<br />
F<br />
t<br />
Model supported by PSSE
Exciter EXST2<br />
Exciter EXST2<br />
IEEE Type ST2 Excitation System Model<br />
V REF<br />
V S<br />
V RMAX<br />
E FDMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
Σ<br />
V ERR<br />
+<br />
Σ<br />
−<br />
+<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
5 K<br />
3<br />
A<br />
+ 1 1<br />
1+ sT V + Σ Σ<br />
A R<br />
sT E<br />
+ −<br />
V RMIN<br />
V B<br />
0<br />
E FD<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
K E<br />
V T<br />
I T<br />
VE = KPVT + jKIIT<br />
V E<br />
π<br />
FEX<br />
If K = 0 and K = 0, then V = 1<br />
P I B<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
R<br />
F<br />
LL<br />
t<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
Model supported by PSLF<br />
Model supported by PSSE does not include T and T inputs<br />
B<br />
E<br />
FD<br />
C<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
N
Exciter EXST2A<br />
Exciter EXST2A<br />
Modified IEEE Type ST2 Excitation System Model<br />
V REF<br />
V S<br />
V RMAX<br />
E FDMAX<br />
V COMP<br />
1<br />
1+ sT R<br />
2<br />
−<br />
Σ<br />
+<br />
V ERR<br />
+<br />
1+<br />
sT 5 3<br />
K<br />
1<br />
A<br />
+<br />
1<br />
C<br />
+ Σ<br />
π Σ<br />
1+<br />
sT 1+ sT V<br />
sT<br />
B<br />
A R<br />
E<br />
−<br />
−<br />
V F<br />
V RMIN<br />
V B<br />
0<br />
E FD<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
K E<br />
V T<br />
I T<br />
VE = KPVT + jKIIT<br />
V E<br />
π<br />
If K = 0 and K = 0, then V = 1<br />
P I B<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
R<br />
F<br />
LL<br />
t<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
Model supported by PSLF<br />
Model supported by PSSE does not include T and T inputs<br />
E<br />
FD<br />
B<br />
I N<br />
C<br />
EX<br />
( )<br />
F = f I<br />
N<br />
FEX
Exciter EXST3<br />
Exciter EXST3<br />
IEEE Type ST3 Excitation System Model<br />
V GMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
V REF<br />
V S<br />
Σ<br />
+<br />
V ERR<br />
+<br />
Σ<br />
+<br />
V IMIN<br />
V IMAX<br />
K<br />
J<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
VA<br />
V G<br />
V RMAX<br />
−<br />
3 + K<br />
A<br />
1<br />
∑<br />
1+ sTA<br />
V R<br />
V RMIN<br />
π<br />
K G<br />
V B<br />
E FDMAX<br />
E FD<br />
V T<br />
I T<br />
( )<br />
V = KV + j K + K X I<br />
E P T I P L T<br />
V E<br />
π<br />
K<br />
P<br />
= Ke θ<br />
P<br />
j P<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
N<br />
FEX<br />
States<br />
1 - V<br />
R<br />
2 - Sensed V<br />
t<br />
3 - LL<br />
Model supported by PSSE<br />
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
Exciter EXST3A<br />
Exciter EXST3A<br />
IEEE Type ST3 Excitation System Model<br />
V GMAX<br />
E C<br />
K<br />
P<br />
V T<br />
I T<br />
1<br />
1+ sT R<br />
V REF<br />
= Ke θ<br />
P<br />
j P<br />
2<br />
IFD<br />
V S<br />
−<br />
Σ +<br />
+<br />
V IMIN<br />
K<br />
J<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
( )<br />
V = KV + j K + K X I<br />
E P T I P L T<br />
I<br />
N<br />
V IMAX<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
VA<br />
EX<br />
V G<br />
∑<br />
V E<br />
( )<br />
F = f I<br />
N<br />
K<br />
A<br />
1+ sT<br />
V RMIN<br />
π<br />
FEX<br />
V RMAX<br />
−<br />
3 +<br />
1<br />
A<br />
V BMAX<br />
π<br />
Speed<br />
K G<br />
V B<br />
E FD<br />
States<br />
1 - V<br />
R<br />
2 - Sensed V<br />
t<br />
3 - LL<br />
Model supported by PSLF
Exciter EXST4B<br />
Exciter EXST4B<br />
IEEE Type ST4B Excitation System Model<br />
K G<br />
V S<br />
V RMAX<br />
V MMAX<br />
E C<br />
1 2<br />
1+ sT R<br />
V REF<br />
−<br />
+<br />
Σ<br />
+<br />
K<br />
PR<br />
V RMIN<br />
K<br />
+<br />
s<br />
IR<br />
−<br />
4 3<br />
1<br />
1 +<br />
1+ sTA<br />
∑<br />
K<br />
PM<br />
V MMIN<br />
K<br />
+<br />
s<br />
IM<br />
V M<br />
V BMAX<br />
π<br />
V B<br />
E FD<br />
V T<br />
I T<br />
( )<br />
V = KV + j K + K X I<br />
E P T I P L T<br />
V E<br />
π<br />
K<br />
P<br />
= Ke θ<br />
P<br />
j P<br />
IFD<br />
I<br />
N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I N<br />
EX<br />
( )<br />
F = f I<br />
N<br />
FEX<br />
States<br />
1 - V<br />
MInt<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
A<br />
R<br />
t<br />
Model supported by PSLF
Exciter EXWTG1<br />
Exciter EXWTG1<br />
Excitation System Model for Wound-Rotor Induction Wind-Turbine Generators<br />
ω REF<br />
R EXT<br />
R MAX<br />
+<br />
ω −<br />
1+<br />
sT 2<br />
R<br />
W1<br />
+<br />
1<br />
∑ K W<br />
∑<br />
1 sT<br />
sT<br />
+<br />
W 2 +<br />
+<br />
1+ A EXT FD<br />
1<br />
R (E )<br />
P E<br />
sK<br />
1+ sT<br />
DP<br />
DP<br />
3<br />
R MIN<br />
States<br />
1 - R external<br />
2 - SpeedReg<br />
3 - Washout<br />
Model supported by PSLF
Exciter EXWTGE<br />
Exciter EXWTGE<br />
Excitation System Model for GE Wind-Turbine Generators<br />
V REG<br />
1<br />
1+ sT R<br />
WindVAR Emulation<br />
V (V )<br />
RFQ<br />
REF<br />
4 +<br />
− 1<br />
+<br />
1<br />
∑<br />
f N<br />
K IV<br />
s<br />
KPV<br />
1+ sT<br />
V<br />
5<br />
∑<br />
3 +<br />
Q MIN<br />
Q MAX<br />
1+ sTC<br />
Q ORD<br />
6<br />
P<br />
FAREF<br />
(V<br />
REF) tan( ⋅)<br />
QREF<br />
(V<br />
REF) Switch = 0<br />
P 1 7<br />
Q<br />
ORD<br />
from separate model<br />
E<br />
π<br />
(V<br />
REF)<br />
1+ sTP<br />
Switch = 1<br />
pfaflg<br />
Switch = 0 Switch = −1<br />
States<br />
1 - V<br />
2 - E<br />
3 - K<br />
4 - V<br />
5 - K<br />
6 - Q<br />
ref<br />
"<br />
QCMD<br />
PV<br />
regMeas<br />
IV<br />
ORD<br />
7 - PMeas<br />
Model supported by PSLF<br />
Q ORD<br />
Switch = 1<br />
varflg<br />
Q CMD<br />
+<br />
Open<br />
Loop<br />
Control<br />
Q GEN<br />
∑<br />
V TERM<br />
−<br />
V MIN<br />
K QI<br />
s<br />
Q MIN<br />
V MAX<br />
VREF<br />
Q MAX<br />
+<br />
÷<br />
∑<br />
Q CMD<br />
P<br />
ORD<br />
(V<br />
S) I<br />
PCMD<br />
(I<br />
FD)<br />
From Wind Turbine Model<br />
1<br />
−<br />
V<br />
I PMAX<br />
TERM<br />
KVI<br />
s<br />
TERM<br />
+ XI<br />
V + XI<br />
QMAX<br />
2<br />
E '' (E )<br />
QMIN<br />
Q CMD<br />
To Generator<br />
Model<br />
FD
Exciter IEEET1<br />
Exciter IEEET1<br />
IEEE Type 1 Excitation System Model<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
V REF<br />
V RMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
+<br />
−<br />
Σ<br />
K<br />
A<br />
Σ<br />
+ 1+ sT<br />
A<br />
3<br />
V R<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
E FD<br />
1<br />
V RMIN<br />
V S<br />
VE = SE ⋅ EFD<br />
V E<br />
+<br />
Σ<br />
+<br />
K E<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
R<br />
t<br />
4 - VF<br />
Model supported by PSSE<br />
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
Exciter IEEET2<br />
Exciter IEEET2<br />
IEEE Type 2 Excitation System Model<br />
V REF<br />
V RMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
K<br />
A<br />
Σ + Σ<br />
1+ sT<br />
+<br />
−<br />
A<br />
3<br />
+<br />
V R<br />
Σ<br />
−<br />
1<br />
sT E<br />
E FD<br />
1<br />
V RMIN<br />
V S<br />
5<br />
1<br />
1+ sTF<br />
2<br />
4<br />
sKF<br />
1+ sT<br />
F1<br />
V E<br />
+<br />
Σ<br />
+<br />
VE = SE ⋅ EFD<br />
K E<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
R<br />
F1<br />
F2<br />
t<br />
Model supported by PSSE
Exciter IEEET3<br />
Exciter IEEET3<br />
IEEE Type 3 Excitation System Model<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
−<br />
V REF<br />
+<br />
K<br />
A<br />
Σ + Σ<br />
1+ sT<br />
+<br />
−<br />
V RMIN<br />
V RMAX<br />
A<br />
3<br />
V R<br />
+<br />
Σ<br />
+<br />
V B<br />
V BMAX<br />
0<br />
K<br />
E<br />
1<br />
+ sT<br />
E<br />
1<br />
E FD<br />
V S<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
V T<br />
I T<br />
VTHEV = KPVT + jKI IT<br />
π<br />
⎛0.78⋅<br />
I ⎞<br />
FD<br />
A = ⎜ ⎟<br />
⎝ VTHEV<br />
⎠<br />
If A> 1, V = 0<br />
B<br />
2<br />
I FD<br />
1−<br />
A<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
F<br />
t<br />
Model supported by PSSE
Exciter IEEET4<br />
Exciter IEEET4<br />
IEEE Type 4 Excitation System Model<br />
S E<br />
ψ<br />
V REF<br />
V RMAX<br />
π<br />
E C<br />
−<br />
+<br />
Σ<br />
ΔV<br />
-K R<br />
-1<br />
1<br />
K R<br />
1<br />
sT RH<br />
ΔV < K V<br />
V RH<br />
2<br />
+<br />
V R<br />
Σ<br />
−<br />
K<br />
E<br />
1<br />
+ sT<br />
E<br />
E FD<br />
1<br />
V RMIN<br />
ΔV > K V<br />
V RMAX<br />
-K V<br />
K V<br />
V RMIN<br />
States<br />
1 - EField<br />
2 - V<br />
RH<br />
Model supported by PSSE
Exciter IEEET5<br />
Exciter IEEET5<br />
Modified IEEE Type 4 Excitation System Model<br />
S E<br />
ψ<br />
E C<br />
−<br />
V REF<br />
+<br />
Σ<br />
ΔV<br />
V RMIN<br />
1<br />
V<br />
sT RH<br />
-K V<br />
RMAX<br />
2<br />
V RMAX<br />
V RMAX<br />
K V<br />
ΔV < K V<br />
V RH<br />
+<br />
V R<br />
π<br />
ΔV > K V<br />
Σ<br />
−<br />
K<br />
E<br />
1<br />
+ sT<br />
E<br />
E FD<br />
1<br />
V RMIN<br />
States<br />
1 - EField<br />
2 - V<br />
RH<br />
Model supported by PSSE
Exciter IEEEX1<br />
Exciter IEEEX1<br />
IEEE Type 1 Excitation System Model<br />
E C<br />
V REF V S<br />
+ +<br />
Regulator<br />
2<br />
1 +<br />
1+<br />
sT 3<br />
−<br />
C<br />
K 4<br />
A<br />
1+ sT R<br />
Σ Σ<br />
V 1+<br />
sTB<br />
1+ sTA<br />
ERR<br />
−<br />
V F<br />
V RMIN<br />
V RMAX<br />
+<br />
V R<br />
Σ<br />
−<br />
1<br />
sT E<br />
1<br />
E FD<br />
K<br />
E<br />
+ S<br />
E<br />
5<br />
sKF<br />
1+ sT<br />
F1<br />
Damping<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
B<br />
R<br />
F<br />
t<br />
Model supported by PSSE
Exciter IEEEX2<br />
Exciter IEEEX2<br />
IEEE Type 2 Excitation System Model IEEEX2<br />
E C<br />
V REF<br />
V S<br />
+ +<br />
Regulator<br />
1<br />
2<br />
1+<br />
sT 3<br />
−<br />
C<br />
K 4<br />
A<br />
1+ sT R<br />
Σ Σ<br />
V +<br />
1+<br />
sT 1+ sT<br />
ERR<br />
−<br />
V F<br />
B<br />
V RMIN<br />
V RMAX<br />
A<br />
+<br />
V R<br />
Σ<br />
−<br />
1<br />
sT E<br />
1<br />
E FD<br />
K<br />
E<br />
+ S<br />
E<br />
sK<br />
( 1+ sT )( 1+<br />
sT )<br />
F<br />
F1 F2<br />
Damping<br />
5 6<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - LL<br />
4 - V<br />
5 - V<br />
6 - V<br />
R<br />
F1<br />
F2<br />
t<br />
Model supported by PSSE
Exciter IEEEX3<br />
Exciter IEEEX3<br />
IEEE Type 3 Excitation System Model<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
V REF<br />
V S<br />
Regulator<br />
K<br />
A<br />
+ sT<br />
+ +<br />
− +<br />
Σ Σ<br />
V 1<br />
ERR −<br />
V F<br />
V RMIN<br />
V RMAX<br />
A<br />
3<br />
V R<br />
+<br />
Σ<br />
+<br />
0<br />
K<br />
E<br />
1<br />
+ sT<br />
E<br />
1<br />
E FD<br />
4<br />
sKF<br />
1+ sT<br />
F<br />
Damping<br />
V BMAX<br />
V T<br />
I T<br />
VTHEV = KPVT + jKI IT<br />
V TH<br />
I FD<br />
V<br />
2<br />
TH<br />
−<br />
( 0.78I<br />
) 2<br />
FD<br />
0<br />
V B<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
R<br />
F<br />
t<br />
Model supported by PSSE
Exciter IEEEX4<br />
Exciter IEEEX4<br />
IEEE Type 4 Excitation System Model<br />
V REF<br />
V RMAX<br />
E C<br />
1<br />
1+ sT R<br />
2<br />
+<br />
−<br />
Σ<br />
VERR<br />
RMAX RMIN<br />
−K V<br />
K V<br />
V<br />
−V<br />
sK T<br />
V<br />
RH<br />
3<br />
V RH<br />
V RMIN<br />
If V ≥ K , V = V<br />
ERR V R RMAX<br />
If V < K , V = V<br />
ERR V R RH<br />
If V ≤− K , V = V<br />
ERR V R RMIN<br />
V R<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
1<br />
E FD<br />
K<br />
E<br />
+ S<br />
E<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
RH<br />
t<br />
Model supported by PSSE
Exciter IEET1A<br />
Exciter IEET1A<br />
Modified IEEE Type 1 Excitation System Model<br />
V REF<br />
V RMAX<br />
E C<br />
+<br />
Σ<br />
− +<br />
+<br />
Σ<br />
−<br />
K<br />
A<br />
1+ sT<br />
A<br />
2<br />
+<br />
Σ<br />
−<br />
1<br />
sT E<br />
E FDMAX<br />
1<br />
E FD<br />
V RMIN<br />
E FDMIN<br />
V S<br />
3<br />
sKF<br />
1+ sT<br />
F<br />
K<br />
E<br />
+ S<br />
E<br />
States<br />
1 - EField<br />
2 - V<br />
3 - V<br />
R<br />
F<br />
Model supported by PSSE
Exciter IEET1B<br />
Exciter IEET1B<br />
Modified IEEE Type 1 Excitation System Model<br />
sK<br />
1+ sT<br />
F1<br />
F1<br />
Switch=0<br />
Switch=1<br />
S E<br />
I MAG<br />
ψ<br />
E C<br />
X V REF<br />
E<br />
+<br />
1<br />
−<br />
+<br />
A<br />
Σ<br />
Σ<br />
+ 1+ sT R<br />
Σ Σ Σ<br />
V<br />
T<br />
+<br />
V SMAX<br />
+<br />
Bias<br />
+ −<br />
V SMIN<br />
V RMIN<br />
+<br />
K<br />
1+ sT<br />
V RMAX<br />
A1<br />
V R<br />
1<br />
1+ sTA2<br />
VREG<br />
π<br />
−<br />
1<br />
+ FD<br />
+<br />
sT E<br />
E<br />
V S<br />
−K E<br />
Model supported by PSSE but not implemented yet in Simulator
Exciter IEET5A<br />
Exciter IEET5A<br />
Modified IEEE Type 4 Excitation System Model<br />
S E<br />
ψ<br />
V REF<br />
V RMAX<br />
π<br />
E C<br />
−<br />
−<br />
+<br />
K<br />
A<br />
Σ<br />
1+ sT<br />
V TO<br />
+<br />
Σ<br />
ΔVT<br />
*<br />
V<br />
RH<br />
V RMIN<br />
V RMAX<br />
-K V<br />
K V<br />
V RMIN<br />
2<br />
ΔV<br />
< K<br />
+<br />
V R<br />
ΔV > K V<br />
−<br />
Σ<br />
K<br />
E<br />
1<br />
+ sT<br />
E<br />
E FDMAX<br />
E FDMIN<br />
K<br />
A<br />
* If TRH<br />
equals zero, block becomes<br />
s<br />
1<br />
E FD<br />
States<br />
1 - EField<br />
2 - V<br />
RH<br />
Model supported by PSSE
Exciter IEEX2A<br />
Exciter IEEX2A<br />
IEEE Type 2A Excitation System Model<br />
V REF<br />
V S<br />
V RMAX<br />
E C<br />
+<br />
+<br />
1 2<br />
1+<br />
sT 3<br />
−<br />
C<br />
K 4<br />
A<br />
1+ sT R<br />
Σ Σ<br />
V 1+<br />
sTB<br />
1+ sTA<br />
+<br />
ERR<br />
−<br />
V F<br />
V RMIN<br />
V R<br />
+<br />
Σ<br />
−<br />
0<br />
1<br />
sT E<br />
1<br />
E FD<br />
5<br />
sKF<br />
1+ sT<br />
F1<br />
K<br />
E<br />
+ S<br />
E<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
3 - V<br />
4 - V<br />
5 - V<br />
B<br />
R<br />
F<br />
t<br />
Model supported by PSSE
Exciter REXS<br />
Exciter REXS<br />
General Purpose Rotating Excitation System Model<br />
E C<br />
1<br />
1+ sT R<br />
10<br />
9<br />
sKF<br />
1+ sT<br />
1+<br />
sT<br />
1+<br />
sT<br />
F1<br />
F 2<br />
V REF<br />
+<br />
V S<br />
Σ<br />
6 Regulator<br />
K (1 + sT<br />
K<br />
VI<br />
C1)(1 + sTC2)<br />
A<br />
V<br />
Σ KVP<br />
+<br />
s (1 + sT )(1 + sT ) 1+ sT<br />
+<br />
ERR<br />
−<br />
V F<br />
−V IMAX<br />
V RMIN<br />
V RMAX<br />
V<br />
+<br />
IMAX<br />
2<br />
−<br />
V<br />
5<br />
E<br />
R<br />
F<br />
V R<br />
+<br />
Σ<br />
K H<br />
K<br />
IP<br />
K<br />
+<br />
s<br />
II<br />
1<br />
1+ sTP<br />
V FMIN<br />
I TERM<br />
B1 B2<br />
V FMAX<br />
+<br />
X C<br />
+ 4<br />
3 +<br />
−<br />
7<br />
8<br />
Σ<br />
V CMAX<br />
+<br />
Σ<br />
−<br />
0<br />
A<br />
1<br />
sT E<br />
0<br />
1<br />
V E<br />
States<br />
1 - V 6 - Voltage PI<br />
2 - Sensed V 7 - V LL1<br />
EX<br />
K EFD<br />
π<br />
T<br />
3 - V 8 - V LL2<br />
F<br />
4 - Current PI 9 - Feedback<br />
5 - V 10 - Feedback LL<br />
R<br />
Speed<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
I<br />
I<br />
E FD<br />
Fbf<br />
0<br />
2<br />
1<br />
I FE<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD<br />
K D<br />
Model supported by PSLF. If flimf = 1 then multiply V<br />
RMIN<br />
,V<br />
RMAX,V FMIN<br />
, and VFMAX by V<br />
TERM.
Exciter REXSY1<br />
Voltage Regulator<br />
E C<br />
1 2<br />
1+ sT R<br />
−<br />
V REF<br />
+<br />
+<br />
Σ<br />
V S<br />
+<br />
V −<br />
F<br />
Σ<br />
Exciter REXSY1<br />
General Purpose Rotating Excitation System Model<br />
−V<br />
V IMAX<br />
IMAX<br />
10<br />
K<br />
VP<br />
K<br />
+<br />
s<br />
1+<br />
sT<br />
1+<br />
sT<br />
F1<br />
F 2<br />
VI<br />
6<br />
9<br />
(1 + sTC1)(1 + sTC2)<br />
(1 + sT )(1 + sT )<br />
B1 B2<br />
7 8<br />
sKF<br />
1+ sT<br />
F<br />
1<br />
1+ sTA<br />
FV ⋅ RMIN<br />
FV ⋅ RMAX<br />
Fbf<br />
0<br />
1<br />
2<br />
[ ]<br />
F= 1.0 + F (E -1.0) ⋅(K +K +S )<br />
5<br />
I FE<br />
V R<br />
1IMF T E D E<br />
E FD<br />
I TERM<br />
X C<br />
Exciter Field Current Regulator<br />
FV ⋅ FMAX<br />
V CMAX<br />
V R<br />
+<br />
Σ<br />
K H<br />
−<br />
K<br />
IP<br />
K<br />
+<br />
s<br />
II<br />
4<br />
1<br />
1+ sTP<br />
FV ⋅ FMIN<br />
3<br />
+<br />
Σ<br />
+<br />
−<br />
1<br />
sT E<br />
0<br />
1<br />
V E<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V 6 - Voltage PI<br />
E<br />
2 - Sensed V 7 - V LL1<br />
Model supported by PSSE<br />
T<br />
3 - V 8 - V LL2<br />
F<br />
4 - Current PI 9 - Feedback<br />
5 - V 10 - Feedback LL<br />
R<br />
I<br />
I<br />
I FE<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
K D<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter REXSYS<br />
Voltage Regulator<br />
E C<br />
1 2<br />
1+ sT R<br />
−<br />
+<br />
V REF<br />
+<br />
Σ<br />
V S<br />
+<br />
V −<br />
F<br />
Σ<br />
Exciter REXSYS<br />
General Purpose Rotating Excitation System Model<br />
V IMAX<br />
−VIMAX<br />
10<br />
K<br />
VP<br />
K<br />
+<br />
s<br />
1+<br />
sT<br />
1+<br />
sT<br />
F1<br />
F 2<br />
VI<br />
6<br />
9<br />
(1 + sTC1)(1 + sTC2)<br />
(1 + sT )(1 + sT )<br />
B1 B2<br />
sKF<br />
1+ sT<br />
7 8<br />
F<br />
1<br />
1+ sTA<br />
FV ⋅ RMIN<br />
Fbf<br />
FV ⋅ RMAX<br />
0<br />
1<br />
2<br />
[ ]<br />
F= 1.0 + F (E -1.0) ⋅(K +K +S )<br />
5<br />
I FE<br />
V R<br />
1IMP T E D E<br />
E FD<br />
Exciter Field Current Regulator<br />
FV ⋅ FMAX<br />
V R<br />
+<br />
Σ<br />
K H<br />
−<br />
K<br />
IP<br />
K<br />
+<br />
s<br />
II<br />
4<br />
1<br />
1+ sTP<br />
FV ⋅ FMIN<br />
3<br />
+<br />
Σ<br />
+<br />
−<br />
1<br />
sT E<br />
0<br />
1<br />
V E<br />
EX<br />
π<br />
F EX<br />
( )<br />
F = f I<br />
N<br />
E FD<br />
States<br />
1 - V 6 - Voltage PI<br />
E<br />
2 - Sensed V 7 - V LL1<br />
Model supported by PSSE<br />
T<br />
3 - V 8 - V LL2<br />
F<br />
4 - Current PI 9 - Feedback<br />
5 - V 10 - Feedback LL<br />
R<br />
I<br />
I<br />
I FE<br />
Σ<br />
+<br />
+<br />
K<br />
E<br />
+ S<br />
E<br />
K D<br />
I<br />
N<br />
I N<br />
KCI<br />
=<br />
V<br />
E<br />
FD<br />
I FD
Exciter SCRX<br />
Exciter SCRX<br />
Bus Fed or Solid Fed Static Excitation System Model<br />
C<br />
SWITCH<br />
=0 C<br />
SWITCH<br />
=1<br />
E 1<br />
T<br />
E C<br />
V REF<br />
E FDMAX<br />
−<br />
+<br />
+<br />
Σ<br />
1+<br />
sT<br />
1+<br />
sT<br />
A<br />
B<br />
1 2<br />
K<br />
+ sT<br />
1<br />
E<br />
π<br />
E FD<br />
E FDMIN<br />
V S<br />
States<br />
1 - Lead-Lag<br />
2 - V<br />
E<br />
Model supported by PSLF<br />
Model supported by PSSE has C = 1<br />
SWITCH
Exciter SEXS_GE<br />
Exciter SEXS_GE<br />
Simplified Excitation System Model<br />
V REF<br />
V comp<br />
E MAX<br />
+<br />
3<br />
E FDMAX<br />
1 2<br />
−<br />
1+<br />
sTA<br />
K<br />
K<br />
C( 1+<br />
sT<br />
4<br />
C)<br />
1 EFD<br />
Σ<br />
1+<br />
sTB<br />
sT<br />
1+ sT<br />
C<br />
E<br />
1+ sT R<br />
+<br />
Stabilizer<br />
Output<br />
E MIN<br />
E FDMIN<br />
States<br />
1 - EField<br />
2 - Sensed V<br />
t<br />
3 - LL<br />
4 - PI<br />
Model supported by PSLF
Exciter SEXS_PTI<br />
Exciter SEXS_PTI<br />
Simplified Excitation System Model<br />
V REF<br />
E FDMAX<br />
E C<br />
−<br />
+<br />
+<br />
Σ<br />
1+<br />
sT<br />
1+<br />
sT<br />
A<br />
B<br />
2<br />
K<br />
+ sT<br />
1<br />
E<br />
1<br />
E FD<br />
E FDMIN<br />
V S<br />
States<br />
1 - EField<br />
2 - LL<br />
Model supported by PSSE
Exciter ST6B<br />
Exciter ST6B<br />
IEEE 421.5 2005 ST6B Excitation System Model<br />
I FD<br />
V C<br />
1<br />
1+ sT R<br />
2<br />
I LR<br />
K CL<br />
+<br />
−<br />
Σ<br />
K LR<br />
VOEL<br />
(OEL=1)<br />
Alternate OEL Inputs<br />
VOEL<br />
(OEL=2)<br />
V AMAX<br />
K FF<br />
V RMIN<br />
1<br />
0<br />
V T<br />
V RMULT<br />
−<br />
−<br />
+<br />
Σ<br />
V UEL<br />
HV<br />
Gate<br />
+<br />
−<br />
+<br />
Σ<br />
K<br />
PA<br />
V AMIN<br />
+ KIA<br />
sK<br />
s<br />
+ 1 + sT<br />
DA<br />
DA<br />
3 4<br />
V A<br />
+<br />
−<br />
Σ<br />
KM<br />
+<br />
+<br />
Σ<br />
V RMAX<br />
V RMIN<br />
LV<br />
Gate<br />
V R<br />
V B<br />
π<br />
1<br />
1+ sTS<br />
E FD<br />
1<br />
V REF<br />
V S<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - PID1<br />
4 - PID2<br />
5 - V<br />
G<br />
t<br />
ST6B supported by PSSE<br />
ESST6B supported by PSLF with optional V<br />
RMULT<br />
V G<br />
5<br />
sKG<br />
1+ sT<br />
G
Exciter ST7B<br />
Exciter ST7B<br />
IEEE 421.5 2005 ST7B Excitation System Model<br />
V DROOP<br />
V<br />
OEL<br />
(OEL=1)<br />
Alternate<br />
OEL Inputs<br />
VOEL<br />
(OEL=2)<br />
V C<br />
1<br />
1+ sT R<br />
1+<br />
sT<br />
1+<br />
sT<br />
G<br />
F<br />
V S<br />
V SCL<br />
+<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
+<br />
Σ<br />
LV<br />
Gate<br />
HV<br />
Gate<br />
V MIN<br />
V MAX<br />
V REF_FB<br />
Σ<br />
Σ<br />
K PA<br />
Alternate UEL Inputs<br />
V REF<br />
VUEL<br />
(UEL=1)<br />
VUEL<br />
(UEL=2)<br />
VOEL<br />
(OEL=3)<br />
VUEL<br />
(UEL=3)<br />
VV<br />
T<br />
RMAX<br />
VV<br />
ST7B supported by PSSE<br />
ESST7B supported by PSLF<br />
Not implemented yet in Simulator<br />
T<br />
RMIN<br />
+<br />
Σ<br />
−<br />
HV<br />
Gate<br />
Σ<br />
K H<br />
−<br />
+<br />
LV<br />
Gate<br />
VV<br />
T<br />
RMAX<br />
K L<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
+<br />
+<br />
Σ<br />
LV<br />
Gate<br />
sKIA<br />
1+ sT<br />
IA<br />
HV<br />
Gate<br />
VV<br />
T<br />
RMIN<br />
1<br />
1+ sTS<br />
E FD
Exciter TEXS<br />
Exciter TEXS<br />
General Purpose Transformer-Fed Excitation System Model<br />
Constant<br />
Source Voltage<br />
Generator<br />
Terminal Voltage<br />
V REF<br />
ILR<br />
V RMAX<br />
K CL<br />
Σ<br />
−<br />
+<br />
K FF<br />
KLR<br />
0<br />
1 0<br />
E C<br />
1<br />
1+ sTR<br />
2<br />
−<br />
+<br />
Σ<br />
+<br />
V IMAX<br />
K<br />
VP<br />
K<br />
+<br />
s<br />
VI<br />
4<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
−<br />
K M<br />
+<br />
V RMAX<br />
+ −<br />
LV<br />
+<br />
Σ<br />
π<br />
Gate Σ<br />
V<br />
R<br />
V<br />
E<br />
E FD<br />
V S<br />
−V IMAX<br />
V RMIN<br />
sKVD<br />
1+ sT<br />
VD<br />
3<br />
1<br />
KG<br />
1+ sT<br />
G<br />
V RMIN<br />
I FD<br />
X C<br />
States<br />
1 - Feedback<br />
2 - Sensed V<br />
t<br />
3 - Derivative Controller<br />
4 - Integral Controller<br />
Model supported by PSLF
Exciter URST5T<br />
Exciter URST5T<br />
IEEE Proposed Type ST5B Excitation System Model<br />
E C<br />
V UEL<br />
V /K<br />
RMAX<br />
R<br />
V /K<br />
RMAX<br />
R<br />
V RMAX<br />
V<br />
RMAX<br />
V<br />
T<br />
1<br />
1+ sT R<br />
2<br />
−<br />
+<br />
Σ<br />
HV<br />
Gate<br />
LV<br />
Gate<br />
+<br />
Σ<br />
+<br />
1+<br />
sT<br />
1+<br />
sT<br />
RMIN<br />
C1<br />
B1<br />
V /K<br />
R<br />
1+<br />
sT<br />
1+<br />
sT<br />
3 4<br />
RMIN<br />
C 2<br />
B2<br />
V /K<br />
R<br />
V RMIN<br />
1<br />
K<br />
+<br />
R<br />
V<br />
RMIN<br />
1<br />
1+<br />
sT<br />
V<br />
T<br />
1<br />
Σ<br />
−<br />
E FD<br />
V REF<br />
V OEL<br />
V STB<br />
K C<br />
I FD<br />
States<br />
1 - V<br />
R<br />
2 - Sensed V<br />
t<br />
3 - LL1<br />
4 - LL2<br />
Model supported by PSSE
Exciter WT2E<br />
Exciter Model WT2E<br />
Tw<br />
Time constant<br />
Kw<br />
Speed regulator gain<br />
Tp<br />
Field current bridge time constant in sec.<br />
Kp<br />
Potential source gain in p.u.<br />
Kpp<br />
Potential source gain in p.u.<br />
Kip<br />
Field current regulator proportional gain<br />
Rmax<br />
Maximum external rotor resistance in p.u.<br />
Rmin<br />
Minimum external rotor resistance in p.u.<br />
Slip_1 to Slip_5 Slip 1 to Slip 5<br />
Power_Ref_1 to Power_Ref_5 Power factor regulator 1 to power factor regulator 5<br />
States:<br />
1 – Rexternal<br />
2 – Speed<br />
3 – Pelec<br />
Model supported by PSLF
Exciter WT2E1<br />
Exciter WT2E1<br />
Rotor Resistance Control Model for Type 2 Wind Generator<br />
Power-Slip Curve<br />
Speed<br />
1<br />
1+ sTSP<br />
2<br />
−<br />
+<br />
Σ<br />
K<br />
P<br />
R MAX<br />
1<br />
+<br />
sT<br />
I<br />
1<br />
R MIN<br />
P elec<br />
1<br />
1+ sTPC<br />
3<br />
States<br />
1 - R<br />
external<br />
2 - Speed<br />
3 - Pelec<br />
Model supported by PSSE
Exciter WT3E and WT3E1<br />
Exciter WT3E and WT3E1<br />
Electrical Control for Type 3 Wind Generator<br />
Reactive Power Control Model<br />
V V RFQ<br />
C<br />
1<br />
1+ sT R<br />
P FAREF<br />
4 +<br />
+<br />
− 1<br />
1<br />
∑<br />
tan<br />
f N<br />
K IV<br />
s<br />
KPV<br />
1+ sT<br />
V<br />
5<br />
∑<br />
3 +<br />
Q MIN<br />
Q MAX<br />
1+ sTFV<br />
6<br />
States<br />
1 - V 6 - Q<br />
ref<br />
2 - E 7 - P<br />
qppcmd<br />
PV<br />
regMeas<br />
IV<br />
ORD<br />
Meas<br />
3 - K 8 - PowerFilter<br />
4 - V 9 - SpeedPI<br />
5 - K 10 - P<br />
ORD<br />
P elec<br />
1<br />
1+ sTP<br />
7<br />
π<br />
Q REF<br />
−1<br />
Active Power (Torque) Control Model<br />
P elec<br />
Speed<br />
( P = 20%, ω P 20<br />
)<br />
0<br />
varflg<br />
( P = 100%, ω P 100<br />
)<br />
( P = 60%, ω P 60<br />
)<br />
( P = 40%, ω P 40<br />
)<br />
( P , ω )<br />
MIN<br />
PMIN<br />
P<br />
1<br />
Q MIN<br />
Q MAX<br />
+<br />
1<br />
1+ sTPWR<br />
Q elec<br />
−<br />
∑<br />
Speed<br />
8<br />
−<br />
∑<br />
V MIN<br />
+<br />
VMAX<br />
K QI<br />
s<br />
K<br />
K<br />
s<br />
V REF<br />
VTERM<br />
−<br />
1 2<br />
+<br />
> 0<br />
∑<br />
Speed<br />
9<br />
+<br />
IP<br />
PP<br />
+ π ∑<br />
−<br />
XI QMAX<br />
K QV<br />
s<br />
XI QMIN<br />
RPMAX<br />
RP MIN<br />
P MAX<br />
vltflg<br />
0<br />
1 10<br />
sT ÷<br />
FP<br />
P MIN<br />
E QCMD<br />
V TERM<br />
IPMAX<br />
I PCMD<br />
WT3E supported by PSLF with RP = P and RP = -P , T = T<br />
MAX wrat MIN wrat FV C<br />
WT3E1 supported by PSSE uses vltflg to determine the limits on E . When vltflg > 0 Simulator always uses XI and XI .<br />
QCMD QMAX QMIN
Exciter WT4E1<br />
Exciter WT4E1<br />
Electrical Control for Type 4 Wind Generator<br />
V C<br />
1<br />
1+ sTRV<br />
V RFQ<br />
K IV<br />
s<br />
+<br />
5 +<br />
− 1<br />
4 ∑<br />
∑<br />
+<br />
KPV<br />
1+ sT<br />
V<br />
3<br />
Q MIN<br />
Q MAX<br />
1+ sTFV<br />
6<br />
States:<br />
1 – Vref 6 - Qord<br />
2 - E qppcmd 7 - Pmeas<br />
3 – Kpv 8 - TPower<br />
4 – VregMeas 9 - Kip<br />
5 – Kiv 10 - Feedback<br />
P FAREF<br />
P elec<br />
1<br />
1+ sTP<br />
tan<br />
7<br />
π<br />
Q REF<br />
0<br />
1<br />
pfaflg<br />
0<br />
1<br />
Q MAX<br />
+<br />
Q elec<br />
−<br />
∑<br />
V MAXCL<br />
K QI<br />
s<br />
1<br />
+<br />
−<br />
∑<br />
I QMAX<br />
K VI<br />
s<br />
2<br />
I QCMD<br />
varflg<br />
Q MIN<br />
V MINCL<br />
V TERM<br />
I QMIN<br />
P REF<br />
dP MAX<br />
pqflag<br />
Converter Current Limit<br />
−<br />
1 +<br />
K − P ORD<br />
IP<br />
Pelec<br />
∑ KPP<br />
+ ∑ ÷<br />
1+ sT 8<br />
PWR<br />
s<br />
−<br />
dP MIN<br />
9<br />
+<br />
I PMAX<br />
I PCMD<br />
10<br />
sKF<br />
1+ sT<br />
F<br />
0.01<br />
V TERM<br />
Model supported by PSSE but not yet implemented in Simulator
Machine Model CSVGN1<br />
Machine Model CSVGN1<br />
Static Shunt Compensator CSVGN1<br />
Other Signals<br />
VOTHSG<br />
V MAX<br />
1.<br />
CBASE<br />
/ SBASE<br />
V<br />
V REF<br />
+<br />
−<br />
Σ<br />
−<br />
( 1+ 1)( 1+<br />
2)<br />
( 1+ sT )( 1+<br />
sT )<br />
K sT sT<br />
V MIN<br />
3 4<br />
1 2<br />
RMIN<br />
1<br />
1+<br />
sT<br />
5<br />
3<br />
/ RBASE<br />
π<br />
−<br />
Σ<br />
MBASE / SBASE<br />
+<br />
Y<br />
States:<br />
1 – Regulator1<br />
2 – Regulator2<br />
3 – Thyristor<br />
RBASE = MBASE<br />
Note : V is the voltage magnitude on the high side of generator step-up transformer if present.<br />
Model supported by PSSE
Machine Model CSVGN3<br />
Machine Model CSVGN3<br />
Static Shunt Compensator CSVGN3<br />
Other Signals<br />
VOTHSG<br />
V MAX<br />
1.<br />
CBASE<br />
/ SBASE<br />
V<br />
V REF<br />
+<br />
−<br />
Σ<br />
−<br />
V ERR<br />
( 1+ 1)( 1+<br />
2)<br />
( 1+ sT )( 1+<br />
sT )<br />
K sT sT<br />
V MIN<br />
3 4<br />
1 2<br />
RMIN<br />
1<br />
1+<br />
sT<br />
5<br />
3<br />
/ RBASE<br />
π<br />
−<br />
Σ<br />
MBASE / SBASE<br />
+<br />
Y<br />
1, if V<br />
ERR<br />
> V<br />
OV<br />
RMIN / RBASE if V
Machine Model CSVGN4<br />
Machine Model CSVGN4<br />
Static Shunt Compensator CSVGN4<br />
Other Signals<br />
VOTHSG<br />
V MAX<br />
1.<br />
CBASE<br />
/ SBASE<br />
V IB<br />
V REF<br />
+<br />
−<br />
Σ<br />
−<br />
V ERR<br />
( 1+ 1)( 1+<br />
2)<br />
( 1+ sT )( 1+<br />
sT )<br />
K sT sT<br />
V MIN<br />
3 4<br />
1 2<br />
RMIN<br />
1<br />
1+<br />
sT<br />
5<br />
3<br />
/ RBASE<br />
π<br />
−<br />
Σ<br />
MBASE / SBASE<br />
+<br />
Y<br />
1, if V<br />
ERR<br />
> V<br />
OV<br />
RMIN / RBASE if V
Machine Model CSVGN5<br />
Machine Model CSVGN5<br />
Static Var Compensator CSVGN5<br />
VOLT(IBUS)<br />
or<br />
VOLT(ICON(M))<br />
Filter<br />
1 −<br />
+ Σ<br />
1 sTs<br />
1<br />
VREF( I)<br />
VOTHSG( I)<br />
+<br />
+<br />
Σ<br />
V EMAX<br />
1 +<br />
2<br />
−V EMAX<br />
Regulator<br />
<br />
1st Stage 2nd Stage<br />
1+<br />
sTS<br />
2<br />
1+<br />
sTS<br />
4<br />
1+<br />
sT<br />
1 sT<br />
S 3<br />
K<br />
SVS<br />
+<br />
S 5<br />
3<br />
VERR<br />
BR<br />
B MAX<br />
' '<br />
ERR LO R MAX SD ERR<br />
'<br />
If DVHI < VERR < DVLO : BR = BR<br />
' '<br />
If VERR < DVHI : BR = BMIN<br />
( )<br />
If V > DV : B = B + K V −DV<br />
B<br />
'<br />
R<br />
1<br />
1+<br />
sT<br />
6<br />
4<br />
BSVS<br />
MBASE( I)<br />
SBASE VAR( L)<br />
States:<br />
1 – Filter<br />
2 – Regulator1<br />
3 – Regulator2<br />
4 – Thyristor<br />
If DV = 0,<br />
DV<br />
DV<br />
= B<br />
= B<br />
/ K<br />
/ K<br />
Fast Override<br />
'<br />
LO MAX SVS<br />
'<br />
HI MIN SVS<br />
B MIN<br />
If DV > 0,<br />
DVLO<br />
= DV<br />
DV = −DV<br />
HI<br />
Thyristor Delay<br />
Model supported by PSSE
Machine Model CSVGN6<br />
Machine Model CSVGN6<br />
Static Var Compensator CSVGN6<br />
VOLT(IBUS)<br />
or<br />
VOLT(ICON(M))<br />
Filter<br />
1 −<br />
+ Σ<br />
1 sTs<br />
1<br />
1<br />
VREF<br />
+<br />
Other<br />
Signals<br />
( )<br />
VOTHSG I<br />
+<br />
+<br />
Σ<br />
1+<br />
sT<br />
1+<br />
sT<br />
V MIN<br />
V MAX<br />
S 2<br />
S 3<br />
2<br />
1+<br />
sT<br />
1<br />
S 4<br />
KSVS<br />
+ sTS<br />
5<br />
V EMIN<br />
V EMAX<br />
3<br />
B R<br />
States:<br />
1 – Filter<br />
2 – Regulator1<br />
3 – Regulator2<br />
4 – Thyristor<br />
VERR<br />
BR<br />
' '<br />
ERR LO R MAX SD ERR<br />
'<br />
If DVHI < VERR < DVLO : BR = BR<br />
' '<br />
If VERR < DVHI : BR = BMIN<br />
( )<br />
If V > DV : B = B + K V −DV<br />
If DV = 0,<br />
DV<br />
DV<br />
= B<br />
= B<br />
/ K<br />
/ K<br />
Fast Override<br />
'<br />
LO MAX SVS<br />
'<br />
HI MIN SVS<br />
B MAX<br />
1<br />
1+<br />
sT<br />
B MIN<br />
6<br />
Thyristor Delay<br />
1 2 BSHUNT<br />
Position 1 is normal (open)<br />
If DV > 0,<br />
If VERR<br />
> DV 2, switch will<br />
DVLO<br />
= DV<br />
close after TDELAY cycles.<br />
DV = −DV<br />
HI<br />
B<br />
'<br />
R<br />
4<br />
BSVS<br />
+<br />
BIAS<br />
+<br />
Σ<br />
+<br />
Model supported by PSSE
Machine Model GENCC<br />
Machine Model GENCC<br />
Generator represented by uniform inductance ratios rotor<br />
modeling to match WSCC type F<br />
X<br />
X<br />
d<br />
'<br />
d<br />
−<br />
−<br />
X<br />
X<br />
'<br />
d<br />
''<br />
d<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
3 – Eqp<br />
4 – Eqpp<br />
5 – Edp<br />
6 - Edpp<br />
E fd<br />
−<br />
+<br />
Σ<br />
−<br />
X<br />
X<br />
1<br />
'<br />
sT do<br />
d<br />
'<br />
d<br />
−<br />
−<br />
X<br />
X<br />
''<br />
d<br />
d<br />
'<br />
E<br />
q<br />
+<br />
−<br />
Σ<br />
−<br />
X<br />
''<br />
sT do<br />
'<br />
d<br />
1<br />
− X<br />
''<br />
d<br />
'<br />
E q<br />
i d<br />
d axis<br />
π<br />
S e<br />
E 1<br />
X<br />
X<br />
q<br />
d<br />
q axis<br />
Model supported by PSLF
Machine Model GENCLS<br />
Machine Model GENCLS<br />
Synchronous machine represented by “classical” modeling or<br />
Thevenin Voltage Source to play Back known<br />
voltage/frequency signal<br />
Recorded<br />
Voltage<br />
Z<br />
ab<br />
= 0.03<br />
on 100 MVA base<br />
Responding<br />
System<br />
A<br />
B<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
gencls<br />
I ppd<br />
B<br />
Responding<br />
System<br />
gencls<br />
I ppd<br />
A<br />
Z<br />
ab<br />
= 0.03<br />
on 100 MVA base<br />
B<br />
Responding<br />
System<br />
Model supported by PSLF
Machine Model GENROU<br />
Machine Model GENROU<br />
Solid Rotor Generator represented by equal mutual<br />
inductance rotor modeling<br />
P fd<br />
X<br />
X<br />
''<br />
d<br />
'<br />
d<br />
−<br />
−<br />
X<br />
X<br />
l<br />
l<br />
E fd<br />
+<br />
Σ<br />
−<br />
1<br />
'<br />
sT do<br />
+<br />
Σ<br />
−<br />
−<br />
1<br />
''<br />
sT do<br />
P kd<br />
X<br />
X<br />
'<br />
d<br />
'<br />
d<br />
−<br />
−<br />
X<br />
X<br />
''<br />
d<br />
l<br />
+<br />
+<br />
Σ<br />
''<br />
P d<br />
+<br />
X<br />
−<br />
X<br />
X<br />
' ''<br />
d d<br />
'<br />
( Xd<br />
−<br />
l)**2<br />
X<br />
'<br />
d<br />
− X<br />
l<br />
d − AXIS<br />
L<br />
ad<br />
i<br />
fd<br />
Σ<br />
+<br />
''<br />
P d<br />
+<br />
X<br />
S e<br />
d<br />
− X<br />
'<br />
d<br />
Σ<br />
+<br />
+<br />
''<br />
P<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
3 – Eqp<br />
4 – PsiDp<br />
5 – PsiQpp<br />
6 – Edp<br />
i d<br />
X<br />
− X<br />
P '' q l<br />
q<br />
X d<br />
− X l<br />
( )<br />
*** q − AXIS identical,<br />
swapping d and q substripts<br />
Model supported by PSLF
Machine Model GENSAL<br />
Machine Model GENSAL<br />
Salient Pole Generator represented by equal mutual<br />
inductance rotor modeling<br />
X<br />
X<br />
''<br />
d<br />
'<br />
d<br />
−<br />
−<br />
X<br />
X<br />
l<br />
l<br />
E fd<br />
+<br />
Σ<br />
−<br />
1<br />
'<br />
sT do<br />
−<br />
P<br />
P<br />
' ''<br />
fd<br />
1<br />
kd<br />
Xd<br />
− Xd<br />
'<br />
+ Σ<br />
''<br />
sT do<br />
Xd<br />
− Xl<br />
−<br />
+<br />
+<br />
Σ<br />
''<br />
P d<br />
X<br />
−<br />
X<br />
X<br />
' ''<br />
d d<br />
'<br />
( Xd<br />
−<br />
l)**2<br />
X<br />
'<br />
d<br />
− X<br />
l<br />
L<br />
ad<br />
i<br />
fd<br />
SP<br />
e<br />
fd<br />
+<br />
Σ<br />
+<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
3 – Eqp<br />
4 – PsiDp<br />
5 – PsiQpp<br />
+<br />
X<br />
d<br />
− X<br />
'<br />
d<br />
Σ<br />
−<br />
−<br />
Σ<br />
+<br />
+<br />
1<br />
''<br />
sT qo<br />
X<br />
q<br />
P kd<br />
− X<br />
''<br />
q<br />
d − AXIS<br />
i d<br />
''<br />
P q<br />
q − AXIS<br />
i q<br />
Model supported by PSLF
Machine Model GENTPF<br />
Machine Model GENTPF<br />
Generator represented by uniform inductance ratios rotor<br />
modeling to match WSCC type F<br />
X<br />
X<br />
d<br />
'<br />
d<br />
−<br />
−<br />
X<br />
X<br />
'<br />
d<br />
''<br />
d<br />
S e<br />
E fd<br />
−<br />
+<br />
Σ<br />
−<br />
1<br />
'<br />
sT do<br />
'<br />
E<br />
q<br />
Se<br />
+<br />
−<br />
Σ<br />
−<br />
1<br />
''<br />
sT do<br />
'<br />
E q<br />
''<br />
ϕ d<br />
X<br />
X<br />
d<br />
'<br />
d<br />
−<br />
−<br />
X<br />
X<br />
''<br />
d<br />
''<br />
d<br />
X<br />
'<br />
d<br />
− X<br />
''<br />
d<br />
i d<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
3 – Eqp<br />
4 – Eqpp<br />
5 – Edp<br />
6 – Edpp<br />
S<br />
e<br />
( ϕag<br />
)<br />
Q − Axis Similar except:<br />
S<br />
e<br />
= 1. + fsat<br />
X<br />
= 1. +<br />
X<br />
q<br />
d<br />
( ϕag<br />
)<br />
Model supported by PSLF
Machine Model GENTRA<br />
Machine Model GENTRA<br />
Salient Pole Generator without Amortisseur Windings<br />
E fd<br />
+<br />
Σ<br />
−<br />
1<br />
sT<br />
'<br />
do<br />
+<br />
Σ<br />
−<br />
S e<br />
'<br />
X d<br />
d − AXIS<br />
+<br />
L<br />
ad<br />
i<br />
fd<br />
Σ<br />
+<br />
X<br />
d<br />
− X<br />
'<br />
d<br />
i d<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
3 - Eqp<br />
q − AXIS<br />
X q<br />
i q<br />
Model supported by PSLF
Machine Model GENWRI<br />
Machine Model GENWRI<br />
Wound-rotor Induction Generator Model with Variable External<br />
Rotor Resistance<br />
P ELEC<br />
P MECH<br />
+<br />
−<br />
Σ<br />
÷<br />
1<br />
2Hs<br />
ωr<br />
f S<br />
−<br />
+<br />
Σ<br />
ω 0<br />
slip<br />
ϕ<br />
ϕ<br />
fd<br />
fq<br />
R2Tpo<br />
=<br />
ω<br />
T<br />
'<br />
0<br />
=<br />
( L − L )<br />
'<br />
( Ls<br />
− L)<br />
( R2ex<br />
+ R2)<br />
'<br />
( ϕ<br />
fd<br />
+ Sd + ( Ls −L)<br />
id<br />
)<br />
'<br />
0<br />
'<br />
( ϕ<br />
fq<br />
+ Sq + ( Ls −L)<br />
iq<br />
)<br />
'<br />
d<br />
'<br />
q<br />
0<br />
R2Tpo<br />
=− + ( slip)<br />
ϕ<br />
T<br />
=− + ( slip)<br />
ϕ<br />
'<br />
T0<br />
ϕ = ϕ<br />
ϕ = ϕ<br />
s<br />
fd<br />
fq<br />
l<br />
fq<br />
fd<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Speed wr<br />
'<br />
R2Tpo is a constant which is equal to T<br />
0<br />
times<br />
the total rotor resistance.<br />
R2 is the internal rotor resistance<br />
R2ex is the internal rotor resistance<br />
e = ωϕ −Li −R i<br />
' '<br />
q s d d a q<br />
e =− ωϕ + Li −R i<br />
' '<br />
d s q q a d<br />
( d) ( q)<br />
'<br />
= fsat<br />
( ϕ )<br />
'<br />
= S ( ϕ )<br />
'<br />
= S ( ϕ )<br />
' '<br />
2<br />
'<br />
2<br />
ϕ = ϕ + ϕ<br />
S<br />
S<br />
S<br />
e<br />
d e d<br />
q e d<br />
Model supported by PSLF
Machine Model GEWTG<br />
Machine Model GEWTG<br />
Generator/converter model for GE wind turbines –<br />
Doubly Fed Asynchronous Generator (DFAG) and<br />
Full Converter (FC) Models<br />
''<br />
E q cmd<br />
( efd)<br />
From<br />
exwtge<br />
1<br />
1+<br />
0.02s<br />
s0 1<br />
LVLP & rrpwr<br />
−1<br />
X ''<br />
High Voltage<br />
Reactive Current<br />
Management<br />
I sorc<br />
I Pcmd<br />
( ladifd)<br />
From<br />
exwtge<br />
1<br />
1+<br />
0.02s<br />
s1 2<br />
I Plv<br />
Low Voltage<br />
Active Current<br />
Management<br />
LVPL<br />
LVPL<br />
1.11<br />
V<br />
1<br />
1+<br />
0.02s<br />
V term<br />
States:<br />
1 – E q<br />
2 – I p<br />
3 – Vmeas<br />
xerox<br />
(0.5pu)<br />
brkpt<br />
(0.9pu)<br />
LowVoltage Power Logic<br />
V<br />
s2 3<br />
Figure 1. DFAG Generator / Converter Model<br />
''<br />
jX<br />
Model supported by PSLF
Machine Model GEWTG<br />
Generator/converter model for GE wind turbines –<br />
Doubly Fed Asynchronous Generator (DFAG) and<br />
Full Converter (FC) Models<br />
''<br />
E q cmd<br />
( efd)<br />
From<br />
exwtge<br />
1<br />
1+<br />
0.02s<br />
s0<br />
LVLP & rrpwr<br />
−1<br />
High Voltage<br />
Reactive Current<br />
Management<br />
I sorc<br />
I Pcmd<br />
( ladifd)<br />
From<br />
exwtge<br />
1<br />
1+<br />
0.02s<br />
s1<br />
I Plv<br />
Low Voltage<br />
Active Current<br />
Management<br />
LVPL<br />
LVPL<br />
1.11<br />
V<br />
1<br />
1+<br />
0.02s<br />
V term<br />
xerox<br />
(0.5pu)<br />
brkpt<br />
(0.7pu)<br />
LowVoltage Power Logic<br />
V<br />
s2<br />
Figure 1. Full Converter Generator / Converter Model<br />
Model supported by PSLF
Machine Model MOTOR1<br />
Machine Model MOTOR1<br />
“Two-cage” or “one-cage” induction machine<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 - Eki<br />
5 – Speed wr<br />
ψ dr 2<br />
+<br />
ψ dr1<br />
+<br />
Σ<br />
−<br />
Σ<br />
−<br />
ω o SLIP<br />
ωoR<br />
L<br />
lr 2<br />
ω o SLIP<br />
ωoR<br />
L<br />
lr1<br />
r2<br />
r1<br />
ψ<br />
+<br />
+<br />
+ ψ<br />
Σ<br />
Σ<br />
2 2<br />
md mq<br />
−<br />
+<br />
ψ qr 2<br />
ψ qr1<br />
S e<br />
1.<br />
L lr 2<br />
1.<br />
L lr 1<br />
+<br />
K<br />
+<br />
Σ<br />
L = L − L<br />
m s l<br />
'<br />
'<br />
Lm = 1./ (1./ Lm + 1./ Llr 1)<br />
= L −Ll<br />
''<br />
''<br />
Lm = 1./ (1./ Lm + 1./ Llr 1+ 1./ Llr 2)<br />
= L −Ll<br />
'<br />
'<br />
To = Llr 1Lm /( ωoRr1Lm ) = ( Llr 1+<br />
Lm )/( ωoRr1)<br />
T = L L /( ω R L ) = ( L + L )/( ω R )<br />
'' ' '' '<br />
o lr 2 m o r 2 m lr 2 m o r 2<br />
''<br />
L m sat<br />
= 1. + S ( ψ )<br />
sat e m<br />
ψ mq<br />
+<br />
Σ<br />
− E = ψ<br />
−<br />
''<br />
d<br />
''<br />
q<br />
''<br />
L m sat<br />
i qs<br />
ψ qr1<br />
ω o SLIP<br />
ψ m<br />
ψ md<br />
Σ<br />
+<br />
−<br />
''<br />
L m sat<br />
i ds<br />
+<br />
Σ<br />
−<br />
ωoR<br />
L<br />
lr1<br />
r1<br />
+<br />
Σ<br />
+<br />
ψ dr1<br />
1.<br />
L lr 1<br />
+ Σ<br />
+<br />
''<br />
L m sat<br />
E<br />
''<br />
q<br />
= ψ<br />
''<br />
d<br />
+<br />
Model supported by PSLF<br />
ψ qr 2<br />
Σ<br />
−<br />
ω o SLIP<br />
ωoR<br />
L<br />
lr 2<br />
r2<br />
+<br />
Σ<br />
+<br />
ψ dr 2<br />
1.<br />
L lr 2<br />
L<br />
''<br />
m sat<br />
=<br />
1.<br />
K / L + 1./ L + 1./ L<br />
sat m lr1 lr 2
Machine Model SVCWSC<br />
Machine Model SVCWSC<br />
Static Var device compatible with WSCC Vx/Wx models<br />
Voltage Clamp Logic<br />
if VbusV2vcl for Tdvcl sec., Kvc =1.<br />
V EMAX<br />
V 1MAX<br />
K<br />
VC<br />
* V<br />
2MAX<br />
B MAX<br />
V BUS<br />
+<br />
Σ<br />
−<br />
X C<br />
1+sT<br />
1+sT<br />
C<br />
S1<br />
−<br />
Σ<br />
V RET<br />
+<br />
Σ<br />
+ +<br />
V EMIN<br />
1+sT<br />
1+sT<br />
V 1MIN<br />
S2<br />
S3<br />
VSCS<br />
+ VS<br />
V (from external PSS)<br />
S<br />
K<br />
VC<br />
1+sT<br />
1+sT<br />
* V<br />
S4<br />
S5<br />
2MIN<br />
K SVS<br />
Fast<br />
Over<br />
Ride<br />
1<br />
1+sT<br />
B MIN<br />
S6<br />
B SVS<br />
π<br />
Input 1<br />
KS1<br />
1+sT<br />
S7<br />
1+sT<br />
1+sT<br />
8<br />
S9<br />
+<br />
Σ<br />
+<br />
sT<br />
1+sT<br />
S13<br />
S14<br />
K S3<br />
V SCSMAX<br />
V SCS<br />
Input 2<br />
KS2<br />
1+sT<br />
S10<br />
1+sT<br />
1+sT<br />
11<br />
S12<br />
V SCSMIN<br />
Model supported by PSLF
Generator Other Model LCFB1<br />
Turbine Load Controller Model LCFB1<br />
Freq<br />
1.0<br />
+<br />
−<br />
Σ<br />
K P<br />
−<br />
e MAX<br />
Pmwset<br />
1<br />
+<br />
1<br />
F b<br />
Σ<br />
−<br />
−db<br />
−e MAX<br />
db<br />
K<br />
s<br />
L rmax<br />
2<br />
+<br />
+<br />
Σ<br />
−L rmax<br />
L rmax<br />
+<br />
Σ<br />
+<br />
Pref<br />
1<br />
1+ sTPELEC<br />
−L rmax<br />
P ref 0<br />
P gen<br />
Frequency Bias Flag - fbf, set to 1 to enable or 0 to disable<br />
Power Controller Flag - pbf, set to 1 to enable or 0 to disable<br />
States<br />
1 - P Sensed<br />
elec<br />
2 - K<br />
I<br />
Model supported by PSLF
Generator Other Model COMP<br />
Voltage Regulator Current Compensating Model COMP<br />
V T<br />
I̅T<br />
V CC = |V T − j ∙ X e ∙ I̅T|<br />
V CT<br />
ECOMP<br />
Model supported by PSSE
Generator Other Model COMPCC<br />
Voltage Regulator Current Compensating Model for Cross-Compounds Units COMPCC<br />
I T1<br />
V T<br />
I T2<br />
E CCCC1 = V T − I T1 + I T2<br />
∙ (R<br />
2<br />
1 + j ∙ X 1 ) + I T1 ∙ (R 2 + j ∙ X 2 )<br />
E CCCC2 = V T − I T1 + I T2<br />
∙ (R<br />
2<br />
1 + j ∙ X 1 ) + I T2 ∙ (R 2 + j ∙ X 2 )<br />
Model supported by PSSE
Generator Other Model GP1<br />
Generic Generator Protection System GP1<br />
52G<br />
GSU<br />
CT<br />
Trip Signal<br />
PT<br />
V T<br />
I<br />
1<br />
flag<br />
0<br />
Generator<br />
Protection<br />
(GP)<br />
Alarm<br />
Only<br />
T 1<br />
T 2<br />
T 1 =<br />
T 2 =<br />
k<br />
1.05 − a<br />
k<br />
s2 − a<br />
I fd<br />
pick up<br />
1.05*pick up<br />
s 2<br />
Field<br />
Shunt<br />
Excitation<br />
System<br />
Notes: = isoc or ifoc*affl<br />
a = asoc or afoc<br />
k = ksoc or kfoc<br />
Model supported by PSLF
Generator Other Model IEEEVC<br />
Voltage Regulator Current Compensating Model IEEEVC<br />
V T<br />
I̅T<br />
V CC = |V T + (R C + j ∙ X C ) ∙ I̅T|<br />
V CT<br />
ECOMP<br />
Model supported by PSSE
Generator Other Model MAXEX1 and MAXEX2<br />
Maximum Excitation Limiter Model MAXEX1 and MAXEX2<br />
EFD DES *EFD RATED<br />
EFD<br />
-<br />
+<br />
⬚<br />
K MX<br />
0<br />
V OEL<br />
V LOW<br />
(EFD 1, TIME 1)<br />
Time (sec.)<br />
(EFD 2<br />
, TIME 2<br />
)<br />
(EFD 3<br />
, TIME 3<br />
)<br />
EFD (p.u. of Rated)<br />
Model supported by PSSE
Generator Other Model MNLEX1<br />
Minimum Excitation Limiter Model MNLEX1<br />
MELMAX<br />
I REAL<br />
+<br />
⬚<br />
PQSIG<br />
+<br />
K M +<br />
sK F2<br />
⬚<br />
1 + sT M 1 + sT F2<br />
-<br />
EFD<br />
1<br />
K<br />
0<br />
VUEL<br />
XADIFD<br />
Model supported by PSSE
Generator Other Model MNLEX2<br />
Minimum Excitation Limiter Model MNLEX2<br />
Q o ∙ E T<br />
2<br />
(R ∙ E T2<br />
) 2<br />
MELMAX<br />
Q<br />
-<br />
+<br />
⬚<br />
X 2<br />
+<br />
-<br />
+<br />
⬚<br />
PQSIG<br />
+<br />
X 2<br />
-<br />
⬚<br />
0<br />
K M<br />
1 + sT M<br />
VUEL<br />
Q o<br />
Q<br />
Radius<br />
P<br />
sK F2<br />
P<br />
1 + sT F2<br />
Model supported by PSSE
Generator Other Model MNLEX3<br />
Minimum Excitation Limiter Model MNLEX3<br />
Q<br />
V T<br />
+ Q/V<br />
Qo + +<br />
K VUEL<br />
⬚<br />
+<br />
M<br />
⬚<br />
⬚<br />
1 + sT<br />
(1.0 p.u.)<br />
PQSIG<br />
M<br />
+<br />
-<br />
sK<br />
B<br />
F2<br />
0<br />
Qo<br />
(1.0 p.u. V)<br />
P<br />
EFD<br />
V T<br />
1 + sT F2<br />
MELMAX<br />
B = Slope<br />
P/V<br />
Model supported by PSSE
Generator Other Model OEL1<br />
Over Excitation Limiter for Synchronous Machine Excitation Systems OEL1<br />
Generator<br />
CT<br />
PT<br />
Field<br />
Winding<br />
Field<br />
Current<br />
Transformer<br />
Voltage<br />
Regulator<br />
Reference<br />
Runback<br />
Voltage<br />
Reference<br />
Overexcitation<br />
Limiter<br />
Model supported by PSLF
Generator Other Model REMCMP<br />
Voltage Regulator Current Compensating Model REMCMP<br />
Remote bus<br />
Remote bus number<br />
Model supported by PSSE
Governor BPA GG<br />
Governor BPA GG<br />
WSCC Type G Governor Model<br />
P MO<br />
+<br />
'<br />
KΔω 1+<br />
sT 2<br />
1<br />
2<br />
1 3 1 4 1+<br />
sFT 1<br />
5<br />
1+ sT −<br />
Σ<br />
1 sT 1+<br />
sT 1+<br />
sT<br />
1<br />
P MAX<br />
+<br />
3<br />
4<br />
5<br />
P M<br />
+<br />
P e<br />
Σ<br />
−<br />
P -P<br />
M<br />
e<br />
States<br />
1 - P mech<br />
2 - Lead-Lag 1<br />
3 - Integrator 3<br />
4 - Integrator 4<br />
Model in the public domain, available from BPA
Governor BPA GH<br />
Governor BPA GH<br />
WSCC Type H Hydro-Mechanical Governor Turbine Model<br />
PILOT VALVE GATE SERVO TURBINE<br />
P0<br />
XR<br />
P UP<br />
P MAX(P.U.)<br />
'<br />
KΔω<br />
1<br />
−<br />
+<br />
Σ<br />
−<br />
1<br />
T (1 + sT )<br />
G<br />
P<br />
3<br />
1<br />
2<br />
1−<br />
sT<br />
W<br />
s 1+<br />
sTW<br />
/2<br />
1<br />
P M<br />
P DOWN<br />
P<br />
MIN<br />
=0<br />
Σ<br />
+<br />
+<br />
R<br />
SDdT<br />
1+ sT<br />
d<br />
d<br />
4<br />
States<br />
1 - P mech<br />
2 - P gate valve<br />
3 - y3<br />
4 - Feedback<br />
Model in the public domain, available from BPA
Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and BPA GLTB<br />
Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and<br />
BPA GLTB<br />
No block diagrams have been created
Governor BPA GSTA<br />
Governor BPA GSTA<br />
WSCC Type S Steam System Governor<br />
And Nonreheat Turbine (Type A) Model<br />
KΔω<br />
1<br />
1+<br />
sT<br />
1<br />
P 0<br />
−<br />
P MAX(P.U.)<br />
+<br />
3 2<br />
1<br />
Σ<br />
2<br />
−<br />
+ sT<br />
T<br />
1<br />
3<br />
1<br />
P UP<br />
1<br />
s<br />
P GV<br />
1<br />
1+ sTCH<br />
P M<br />
P DOWN<br />
P MIN(P.U.)<br />
States<br />
1 - P mech<br />
2 - P gate valve<br />
3 - Lead-lag<br />
Model in the public domain, available from BPA
Governor BPA GSTB<br />
Governor BPA GSTB<br />
WSCC Type S Steam System Governor and Tandem Compound<br />
Single Reheat Turbine (Type B) Model<br />
P 0<br />
P MAX(P.U.)<br />
P UP<br />
KΔω<br />
1<br />
1+<br />
sT<br />
1<br />
2<br />
2<br />
−<br />
+ sT<br />
T<br />
1<br />
3<br />
+<br />
Σ<br />
−<br />
1<br />
1<br />
s<br />
1<br />
P GV<br />
P DOWN<br />
P MIN(P.U.)<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
P M<br />
FHP<br />
FIP<br />
FLP<br />
States<br />
1 - P gate valve<br />
2 - Lead-lag<br />
3 - y3<br />
4 - y4<br />
5 - y5<br />
1<br />
1+ sTCH<br />
Model in the public domain, available from BPA<br />
1<br />
1+ sTRH<br />
1<br />
1+ sTCO<br />
3 4 5
Governor BPA GSTC<br />
Governor BPA GSTC<br />
WSCC Type S Steam System Governor and Tandem Compound<br />
Double Reheat Turbine (Type C) Model<br />
P 0<br />
P MAX(P.U.)<br />
P UP<br />
KΔω<br />
1<br />
1+<br />
sT<br />
1<br />
2<br />
2<br />
−<br />
+ sT<br />
T<br />
1<br />
3<br />
+<br />
Σ<br />
−<br />
1<br />
1<br />
s<br />
1<br />
P GV<br />
P DOWN<br />
P MIN(P.U.)<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
P M<br />
States<br />
1 - P gate valve<br />
2 - Lead-lag<br />
3 - y3<br />
4 - y4<br />
5 - y5<br />
6 - y6<br />
1<br />
1 sTCH<br />
FVHP<br />
+ 1+ sTRH1<br />
1+ sTRH<br />
2<br />
Model in the public domain, available from BPA<br />
1<br />
FHP<br />
1<br />
FIP<br />
1<br />
1+ sTCO<br />
3 4 5 6<br />
F LP
Governor BPA GWTW<br />
Governor BPA GWTW<br />
WSCC Type W Hydro Governor System<br />
And Hydro Turbine (Type W) Model<br />
P 0<br />
P MAX/100<br />
KΔω<br />
1+<br />
sT2<br />
(1 + sT )(1 + sT )<br />
1 3<br />
−<br />
+<br />
Σ<br />
P GV<br />
1−<br />
sTW<br />
1+<br />
0.5sT<br />
W<br />
1<br />
P M<br />
2 3<br />
P MIN/100<br />
States<br />
1 - P mech<br />
2 - y0<br />
3 - y1<br />
Model in the public domain, available from BPA
Governor CCBT1<br />
Governor CCBT1<br />
Steam Plant Boiler/Turbine and Governor Model<br />
K<br />
MIN4<br />
−<br />
P mech<br />
K<br />
MIN3<br />
−<br />
1<br />
1+ sTF<br />
P4<br />
+<br />
6<br />
5<br />
P3<br />
K<br />
+<br />
s<br />
Σ<br />
Σ<br />
Σ<br />
I 4<br />
K<br />
+<br />
s<br />
Σ<br />
+<br />
7<br />
+<br />
MAX4<br />
MAX3<br />
I 3<br />
1<br />
1+ sTW<br />
+<br />
Σ<br />
MAX7<br />
K<br />
+<br />
P7<br />
8 9<br />
Σ sT D<br />
+<br />
Σ<br />
−<br />
+<br />
−<br />
Σ Bias<br />
sKD7<br />
+ +<br />
+<br />
+<br />
14<br />
1<br />
MIN5<br />
sT<br />
K<br />
D7<br />
MIN7<br />
P5<br />
4<br />
K<br />
+<br />
s<br />
1.0 −<br />
1.0<br />
K<br />
+<br />
1 r Σ L ref<br />
+<br />
-dbd<br />
−<br />
K B<br />
+dbd Σ Speed<br />
Model supported by PSLF<br />
Proportional-integral blocks 1-6 also have rate limits not shown in the block diagram<br />
1<br />
MAX2<br />
I 5<br />
K<br />
P2<br />
MAX5<br />
Press ref<br />
K<br />
+<br />
s<br />
MIN2<br />
10<br />
I 2<br />
−<br />
Σ<br />
−<br />
MIN1<br />
MAX1<br />
K<br />
K P<br />
+<br />
K<br />
1+ sT<br />
12<br />
P1<br />
Σ<br />
PLM<br />
PLM<br />
K<br />
+<br />
s<br />
I1<br />
π<br />
−<br />
P<br />
π<br />
lmref<br />
-1<br />
π<br />
•Press<br />
T = 50<br />
3<br />
PLM<br />
0<br />
MAX6<br />
11<br />
ref<br />
P6<br />
V MIN<br />
K<br />
K<br />
+<br />
s<br />
2<br />
1<br />
1+ sTG<br />
PGOV<br />
+<br />
−<br />
+<br />
+<br />
I 6<br />
K<br />
+<br />
s<br />
Σ<br />
ω<br />
ref<br />
MIN6<br />
1−<br />
ah<br />
IGOV<br />
ah<br />
V MAX<br />
15<br />
−<br />
−<br />
−<br />
Σ<br />
−<br />
+<br />
rvalve<br />
Σ<br />
−<br />
Σ<br />
+<br />
Valve Bias<br />
1<br />
sT RH<br />
P gen<br />
+<br />
1<br />
1+ sTPelec<br />
rpelec<br />
13<br />
Speed<br />
1<br />
Σ<br />
+<br />
P mech
Governor CRCMGV<br />
Governor CRCMGV<br />
Cross Compound Turbine-Governor Model<br />
Reference<br />
Speed<br />
(HP)<br />
( HP)<br />
1/ R 1<br />
−<br />
1+ sT<br />
Σ<br />
1( HP)<br />
+<br />
0<br />
High-Pressure Unit<br />
P MAX(HP)<br />
1+<br />
sF<br />
( HP) 5( HP)<br />
+<br />
Σ<br />
−<br />
2 3 4<br />
D E −<br />
( 1+ sT3( HP) )( 1+ sT4( HP) )( 1+<br />
sT5( HP)<br />
)<br />
T<br />
( )( ) 2<br />
H ( HP)<br />
T HP<br />
P mech(HP)<br />
Reference<br />
Speed (LP)<br />
−<br />
States<br />
1 - HPInput<br />
2 - HPState1<br />
3 - HPState2<br />
4 - HPState3<br />
5 - LPInput<br />
6 - LPState1<br />
7 - LPState2<br />
+<br />
Σ<br />
1/ R<br />
8 - LPState3<br />
Model supported by PSLF and PSSE<br />
1<br />
( LP)<br />
−<br />
+ sT<br />
Σ<br />
1( LP)<br />
P MAX(LP)<br />
1+<br />
sF<br />
+ ( LP) 5( LP)<br />
( 1+ sT3( LP) )( 1+ sT4( LP) )( 1+<br />
sT5( LP)<br />
)<br />
0<br />
Low-Pressure Unit<br />
5<br />
T<br />
6 7 8<br />
( −D )( ) 2<br />
H ( LP)<br />
ET − HP<br />
+<br />
Σ<br />
−<br />
P mech(LP)
Governor DEGOV<br />
Governor DEGOV<br />
Woodward Diesel Governor Model<br />
T MAX<br />
1+Speed<br />
Δω<br />
Speed<br />
( 1 sT )<br />
− +<br />
1+ sT +<br />
3<br />
2<br />
1<br />
s T2T1<br />
<br />
Electric Control Box<br />
1 2<br />
K ( 1+<br />
sT4<br />
)<br />
( 1+ )( 1+<br />
)<br />
s sT sT<br />
T MIN<br />
5 6<br />
<br />
Actuator<br />
sT<br />
e − D<br />
<br />
Engine<br />
π<br />
Pmech<br />
3 4 5<br />
States<br />
1 - Control box 1<br />
2 - Control box 2<br />
3 - Actuator 1<br />
4 - Actuator 2<br />
5 - Actuator 3<br />
Model supported by PSSE
Governor DEGOV1<br />
Governor DEGOV1<br />
Woodward Diesel Governor Model<br />
P ref<br />
T MAX<br />
1+Speed<br />
Δω<br />
Speed<br />
−<br />
+<br />
Σ<br />
−<br />
( 1 sT )<br />
− +<br />
1+ sT +<br />
3<br />
2<br />
1<br />
s T2T1<br />
<br />
Electric Control Box<br />
1 2<br />
DROOP<br />
K ( 1+<br />
sT4<br />
)<br />
( 1+ )( 1+<br />
)<br />
s sT sT<br />
T MIN<br />
5 6<br />
<br />
Actuator<br />
3 4 5<br />
0<br />
1<br />
sT<br />
e − D<br />
<br />
Engine<br />
6<br />
1<br />
1+ sTE<br />
π<br />
Droop Control<br />
Pmech<br />
SBASE<br />
MBASE<br />
P elec<br />
States<br />
1 - Control box 1<br />
2 - Control box 2<br />
3 - Actuator 1<br />
4 - Actuator 2<br />
5 - Actuator 3<br />
6 - Droop Input<br />
Model supported by PSSE
Governor G2WSCC<br />
Governor G2WSCC<br />
Double Derivative Hydro Governor and Turbine<br />
Represents WECC G2 Governor Plus Turbine Model<br />
P ref<br />
Δω<br />
(Speed)<br />
db 1<br />
eps<br />
1<br />
1+ sTD<br />
2 sK1<br />
3<br />
+ sT<br />
1<br />
F<br />
+<br />
+<br />
Σ<br />
+<br />
−<br />
+<br />
Σ<br />
−<br />
KI<br />
s<br />
6<br />
2<br />
sK2<br />
2<br />
+ sTF<br />
(1 )<br />
4 5<br />
R<br />
(T<br />
T<br />
=0)<br />
7<br />
1<br />
1+ sTT<br />
P elec<br />
States<br />
+<br />
Σ<br />
−<br />
KG<br />
1+ sT<br />
VEL CLOSE<br />
VEL OPEN<br />
P<br />
P MAX<br />
8<br />
1 9<br />
s<br />
P MIN<br />
Model supported by PSLF<br />
GV1, PGV1...GV6, PGV6 are the x,y coordinates of<br />
N GV<br />
block<br />
db 2<br />
GV 1+<br />
sA<br />
1+<br />
sB<br />
N GV<br />
P GV<br />
turb<br />
turb<br />
T<br />
T<br />
turb<br />
turb<br />
1<br />
P mech<br />
1 - P<br />
2 - T<br />
3 - K<br />
mech<br />
D<br />
1<br />
4 - K first<br />
2<br />
5 - K second<br />
2<br />
6 - Integrator<br />
7 - P Sensed<br />
elec<br />
8 - Valve<br />
9 - Gate
Governor GAST_GE<br />
Governor GAST_GE<br />
Gas Turbine-Governor Model<br />
if (D >L ) R =L<br />
5<br />
−<br />
V INC LIM TRAT<br />
else R<br />
LIM<br />
=R D<br />
Σ<br />
MAX V<br />
1<br />
1+ sTLTR<br />
+<br />
V MAX<br />
P ( )<br />
ref<br />
K<br />
A<br />
1+<br />
sT4<br />
Σ<br />
1+<br />
sT<br />
5<br />
1<br />
LV<br />
GATE<br />
+<br />
Σ<br />
−<br />
R LIM<br />
1<br />
sT<br />
1<br />
2<br />
+<br />
Σ<br />
−<br />
1+<br />
AsT<br />
1+<br />
BsT<br />
2<br />
2<br />
3<br />
P GV<br />
G V<br />
dbb<br />
P mech<br />
1<br />
R<br />
V MIN<br />
F IDLE<br />
eps<br />
F IDLE<br />
+ −<br />
Σ K T Σ +<br />
+<br />
−<br />
4<br />
1<br />
1+<br />
sT<br />
3<br />
db 0<br />
Δω<br />
(Speed)<br />
L MAX<br />
Model supported by PSLF<br />
GV1, PGV1...GV6, PGV6 are the x,y coordinates of P vs. GV block<br />
GV<br />
States<br />
1 - Input LL<br />
2 - Integrator<br />
3 - Governor LL<br />
4 - Load Limit<br />
5 - Temperature
Governor GAST_PTI<br />
Governor GAST_PTI<br />
Gas Turbine-Governor Model<br />
Speed<br />
D turb<br />
1<br />
R<br />
V MAX<br />
Load ref<br />
+<br />
−<br />
Σ<br />
LV<br />
Gate<br />
1<br />
1 sT<br />
1<br />
+<br />
1<br />
1+<br />
sT2<br />
1<br />
2<br />
+<br />
Σ<br />
−<br />
P mech<br />
V MIN<br />
Σ<br />
+<br />
+ −<br />
K T<br />
Σ<br />
+<br />
3<br />
1<br />
1+<br />
sT<br />
3<br />
States<br />
1 - Fuel Valve<br />
2 - Fuel Flow<br />
3 - Exhaust Temperature<br />
Model supported by PSSE<br />
A<br />
T<br />
(Load Limit)
Governor GAST2A<br />
States<br />
1 - Speed Governor<br />
2 - Valve Positioner<br />
3 - Fuel System<br />
4 - Radiation Shield<br />
5 - Thermocouple<br />
6 - Temp Control<br />
7 - Turbine Dynamics<br />
Reference<br />
+<br />
Σ<br />
−<br />
( + 1)<br />
W sX<br />
MIN<br />
Temperature<br />
Control*<br />
sY + Z<br />
MAX<br />
1<br />
Speed<br />
Governor<br />
1+<br />
sT<br />
sτ<br />
T<br />
Low<br />
Value<br />
Select<br />
Speed<br />
Control<br />
Governor GAST2A<br />
Gas Turbine-Governor Model<br />
MAX<br />
5<br />
6<br />
T C<br />
Thermocouple<br />
+<br />
1<br />
Σ −<br />
1+<br />
sT<br />
K 3<br />
4<br />
Fuel<br />
Control<br />
e −sT<br />
K<br />
Radiation<br />
Shield<br />
Δω P mech T RATE<br />
π<br />
MBASE<br />
+<br />
1.0 +<br />
Σ<br />
π<br />
5<br />
4<br />
5<br />
4<br />
+<br />
1 sT<br />
f<br />
+<br />
1<br />
3<br />
+<br />
K<br />
K 6<br />
+<br />
Σ<br />
−<br />
Turbine<br />
Valve<br />
Positioner<br />
A<br />
C + sB<br />
Turbine<br />
f 2<br />
w f1<br />
Fuel<br />
2 System 3<br />
K F<br />
1<br />
1+ sτ<br />
F<br />
7<br />
w f2<br />
Turbine<br />
Exhaust<br />
e −sE TD<br />
Wf<br />
Fuel<br />
Flow<br />
e −sE CR<br />
Gas Turbine<br />
Dynamics<br />
1<br />
1+ sTCD<br />
Model supported by PSSE<br />
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative<br />
f =T -A ⎛<br />
1.0-w ⎞<br />
-B ( Speed )<br />
1 R f1 ⎜ ⎟<br />
f ( f2 ) ( )<br />
⎝ f1 ⎠ f1<br />
2<br />
=Af2 -Bf2 w -Cf2<br />
Speed
Governor GASTWD<br />
SBASE<br />
T RATE<br />
K<br />
1+ sT<br />
1<br />
P elec<br />
P e<br />
DROOP<br />
D<br />
MAX<br />
Temperature<br />
Control*<br />
Governor GASTWD<br />
Woodward Gas Turbine-Governor Model<br />
sT<br />
sτ<br />
MAX<br />
5<br />
+ 1<br />
T<br />
Σ −<br />
+ 5<br />
Thermocouple<br />
1<br />
1+<br />
sT<br />
6<br />
T<br />
C<br />
Setpoint for<br />
Temperature Control<br />
4<br />
4<br />
K<br />
Radiation<br />
Shield<br />
K<br />
Turbine<br />
5<br />
4<br />
+<br />
1 sT<br />
f<br />
+<br />
1<br />
3<br />
w f1<br />
Turbine<br />
Exhaust<br />
e −sE TD<br />
Speed<br />
Reference<br />
States<br />
+<br />
Σ<br />
−<br />
−<br />
1 - Power Transducer<br />
2 - Valve Positioner<br />
3 - Fuel System<br />
4 - Radiation Shield<br />
5 - Thermocouple<br />
MIN<br />
Model supported by PSSE<br />
K P<br />
K I<br />
s<br />
sK D<br />
+<br />
+<br />
Σ<br />
8 9<br />
+<br />
Low<br />
Value<br />
Select<br />
Speed<br />
Control<br />
K 3<br />
Fuel<br />
Control<br />
e −sT<br />
Δω P mech T RATE<br />
π<br />
MBASE<br />
+<br />
1.0 +<br />
Σ<br />
π<br />
+<br />
K 6<br />
+<br />
Σ<br />
−<br />
Valve<br />
Positioner<br />
A<br />
C + sB<br />
Turbine<br />
f 2<br />
Fuel<br />
2 System 3<br />
K F<br />
1<br />
1+ sτ<br />
F<br />
f =T -A ( 1.0-w )-B ( Speed)<br />
f =A -B<br />
1 R f1 f1 f1<br />
( w )-C ( Speed)<br />
2 f2 f2 f2 f2<br />
w f2<br />
W f<br />
Fuel<br />
Flow<br />
e −sE CR<br />
1<br />
1+ sTCD<br />
Gas Turbine<br />
Dynamics<br />
6 - Temp Control<br />
7 - Turbine Dynamics<br />
8 - PID 1<br />
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative<br />
9 - PID 2<br />
7
Governor GGOV1<br />
Governor GGOV1 – GE General Governor-Turbine Model<br />
Ldref<br />
( L / K ) w<br />
dref turb fnl<br />
+ +<br />
Σ<br />
−<br />
6<br />
1<br />
1+ sTFload<br />
If D m > 0, (Speed) D If D<br />
**D m<br />
m<br />
m < 0, (Speed+1)<br />
−<br />
Pmech<br />
10<br />
1+<br />
sT<br />
1+<br />
sT<br />
SA<br />
SB<br />
π<br />
Σ<br />
+<br />
5<br />
P ref<br />
+<br />
8<br />
-1.1r<br />
P mwset<br />
Σ<br />
Speed<br />
+<br />
K IMW<br />
s<br />
+ Σ −<br />
1.1r<br />
+<br />
1<br />
Σ<br />
r<br />
−<br />
−<br />
s<br />
+ sT<br />
1<br />
A<br />
−<br />
maxerr<br />
-db<br />
db<br />
minerr<br />
−2<br />
aset<br />
−1<br />
Rselect<br />
UP DOWN CLOSE OPEN<br />
9<br />
+<br />
Σ<br />
K Pload<br />
K<br />
K Iload<br />
s<br />
A<br />
K Pgov<br />
K Igov<br />
s<br />
sK<br />
Dgov<br />
1+ sT<br />
∆t<br />
Dgov<br />
+<br />
3<br />
2<br />
7<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
+<br />
Σ<br />
Σ<br />
+<br />
1.0<br />
Timestep<br />
governor output<br />
valve stroke<br />
Low<br />
Value<br />
Select<br />
1<br />
1+ sTACT<br />
V MIN<br />
V MAX<br />
4<br />
π<br />
0 1<br />
1+<br />
sT<br />
1+<br />
sT<br />
+<br />
Flag<br />
1.0 (Speed+1)<br />
1<br />
1 - P<br />
elec<br />
Measured 5 - Turbine LL<br />
P elec 1<br />
2 - Governor Differential Control 6 - Turbine Load Limiter<br />
1+ sTPelec<br />
3 - Governor Integral Control 7 - Turbine Load Integral Control<br />
Model supported by PSLF<br />
4 - Turbine Actuator 8 - Supervisory Load Control<br />
Model supported by PSSE does not include non-windup limits on K<br />
IMW<br />
block<br />
9 - Accel Control<br />
R , R , R , and R inputs not implemented in Simulator<br />
10 - Temp Detection LL<br />
States<br />
V MAX<br />
V MIN<br />
C<br />
B<br />
sT eng<br />
e − turb<br />
K<br />
Σ<br />
−<br />
w fnl
Governor GGOV2<br />
Governor GGOV2 - GE General Governor-Turbine Model<br />
P ref<br />
+<br />
-1.1r<br />
8<br />
P mwset<br />
Σ<br />
Ldref<br />
+<br />
Speed<br />
K imw<br />
s<br />
s7<br />
+ Σ −<br />
P ELEC<br />
1.1r<br />
+<br />
1<br />
( L / K ) + w<br />
+<br />
Σ<br />
r<br />
−<br />
−<br />
1<br />
1+ sTPelec<br />
dref turb fnl<br />
s<br />
+ sT<br />
1<br />
a<br />
−2<br />
aset<br />
s8<br />
−1<br />
Rselect<br />
s0<br />
−<br />
maxerr<br />
-db<br />
db<br />
minerr<br />
Model supported by PSLF<br />
1<br />
9<br />
+<br />
Σ<br />
Ka<br />
K pgov<br />
K igov<br />
s<br />
sK<br />
dgov<br />
1+ sT<br />
K pload<br />
K iload<br />
s<br />
dgov<br />
∆t<br />
+<br />
s23<br />
s1 2<br />
7<br />
+<br />
Σ<br />
+<br />
Σ<br />
−<br />
1.0<br />
s6<br />
Timestep<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
6<br />
1<br />
1+ sTfload<br />
fsrt<br />
fsra<br />
Low<br />
Value<br />
Select<br />
fsrn<br />
If D m > 0, (Speed) D m<br />
If D<br />
**D m<br />
−<br />
m < 0, (Speed+1)<br />
Σ<br />
10 1+<br />
sTsa<br />
π<br />
+<br />
1+<br />
sTsb<br />
5<br />
1+<br />
sT<br />
Speed<br />
c<br />
1+<br />
sTb<br />
Frequencydependent<br />
limit<br />
sT<br />
e − eng<br />
ropen<br />
vmax<br />
V MAX<br />
Kturb<br />
4<br />
1<br />
π<br />
+<br />
1+ sT<br />
Σ<br />
act<br />
−<br />
s3 Flag<br />
vmin<br />
rclose<br />
w<br />
0 fnl<br />
1<br />
1.0 (Speed+1)<br />
s5<br />
s9<br />
V MIN<br />
governor output<br />
valve stroke<br />
States<br />
PMECH<br />
1 - P<br />
elec<br />
Measured 5 - Turbine LL<br />
2 - Governor Differential Control 6 - Turbine Load Limiter<br />
3 - Governor Integral Control 7 - Turbine Load Integral Control<br />
4 - Turbine Actuator 8 - Supervisory Load Control<br />
9 - Accel Control<br />
s4<br />
10 - Temp Detection LL
Governor GGOV3<br />
P ref<br />
+<br />
8<br />
-1.1r<br />
P mwset<br />
Σ<br />
Ldref<br />
+<br />
K imw<br />
s<br />
Percieved<br />
Speed<br />
+ Σ −<br />
1.1r<br />
+<br />
1<br />
Governor GGOV3 - GE General Governor-Turbine Model<br />
( L / K ) + w<br />
+<br />
Σ<br />
R<br />
−<br />
−<br />
dref turb fnl<br />
s<br />
+ sT<br />
1<br />
a<br />
−2<br />
aset<br />
−1<br />
Rselect<br />
−<br />
9<br />
Maxerr<br />
-db<br />
db<br />
Minerr<br />
+<br />
Σ<br />
UP DOWN CLOSE OPEN<br />
Ka<br />
K pgov<br />
K igov<br />
s<br />
sK<br />
dgov<br />
1+ sT<br />
States<br />
K pload<br />
K iload<br />
s<br />
dgov<br />
∆t<br />
+<br />
+<br />
Σ<br />
+<br />
Σ<br />
Σ<br />
+<br />
−<br />
1.0<br />
1<br />
1+ sTfload<br />
Low<br />
Value<br />
1+<br />
sT<br />
1+<br />
sT<br />
+<br />
Select<br />
3<br />
1 4<br />
+ Σ<br />
1+ sTact<br />
+<br />
2<br />
7<br />
Timestep<br />
6<br />
governor output<br />
valve stroke<br />
10<br />
V MIN<br />
If D<br />
If D<br />
V MAX<br />
m ><br />
m <<br />
0, (Speed)<br />
0, (Speed+1)<br />
sa<br />
sb<br />
V MIN<br />
V MAX<br />
**D m<br />
π<br />
Dm<br />
π<br />
0 1<br />
+<br />
Flag<br />
−<br />
5<br />
1.0 (Speed+1)<br />
+<br />
1+<br />
sTc<br />
1+<br />
sT<br />
11<br />
e − Σ<br />
b<br />
sT eng<br />
K turb<br />
1+<br />
sT<br />
1+<br />
sT<br />
Σ<br />
−<br />
PMECH<br />
1<br />
1 - P<br />
elec<br />
Measured 5 - Turbine LL 9 - Accel Control<br />
P ELEC 1<br />
2 - Governor Differential Control 6 - Turbine Load Limiter 10 - Temp Detection LL<br />
1+ sTPelec<br />
3 - Governor Integral Control 7 - Turbine Load Integral Control 11 - Fuel System Lead Lag<br />
Model supported by PSLF 4 - Turbine Actuator 8 - Supervisory Load Control<br />
dnrate, R , R , R , and R inputs not implemented in Simulator<br />
cd<br />
bd<br />
w fnl
Governor GGOV3 - GE General Governor-Turbine Model<br />
slope = 1<br />
dnhi<br />
Measured<br />
Speed<br />
ffa<br />
ffb<br />
slope = ffc<br />
Filtered<br />
Speed<br />
dnlo<br />
Percieved<br />
Speed<br />
Nonlinear Speed Filter<br />
Model supported by PSLF<br />
Rate limit dnrate not used in Simulator
Governor GPWSCC<br />
Governor GPWSCC<br />
PID Governor-Turbine Model<br />
P ref<br />
K P<br />
Δω<br />
(Speed)<br />
db 1<br />
err<br />
−<br />
+<br />
Σ<br />
−<br />
1<br />
1+ sTD<br />
2<br />
K 1<br />
s<br />
3<br />
+<br />
+<br />
Σ<br />
+<br />
CV<br />
T<br />
t<br />
=<br />
0<br />
sKD<br />
1+ sT<br />
f<br />
4<br />
R<br />
( T<br />
t<br />
> 0)<br />
5<br />
1<br />
1+ sTt<br />
P elec<br />
VEL OPEN<br />
P MAX<br />
Σ<br />
+ −<br />
KG<br />
1+ sT<br />
P<br />
6<br />
1 7<br />
s db2<br />
GV 1+<br />
sA<br />
1+<br />
sB<br />
N GV<br />
P GV<br />
turb<br />
turb<br />
T<br />
T<br />
turb<br />
turb<br />
1<br />
P mech<br />
VEL CLOSE<br />
P MIN<br />
Model supported by PSLF<br />
GV1, PGV1...GV6, PGV6 are the x,y coordinates of<br />
N GV<br />
block<br />
States<br />
1 - P 5 - P Sensed<br />
mech<br />
D<br />
elec<br />
2 - T 6 - Valve<br />
3 - Integrator 7 - Gate<br />
4 - Derivative
Governor HYG3<br />
Governor HYG3<br />
PID Governor, Double Derivative Governor, and Turbine<br />
Δω = (speed-1)pu<br />
Δω<br />
Δω<br />
db 1<br />
db 1<br />
−<br />
R elec<br />
P ref<br />
+<br />
Σ<br />
−<br />
7<br />
−<br />
1<br />
1+ sTD<br />
R gate<br />
1<br />
1+ sTD<br />
1<br />
1+ sTt<br />
1<br />
1<br />
P elec<br />
sK1<br />
+ sT<br />
1<br />
f<br />
2<br />
sK2<br />
2<br />
( 1+ sTf<br />
)<br />
K 2<br />
K I<br />
s<br />
sK1<br />
+ sT<br />
1<br />
f<br />
2<br />
+<br />
+<br />
8<br />
9<br />
+<br />
3<br />
Σ<br />
2<br />
−<br />
+<br />
−<br />
R gate<br />
+<br />
+<br />
Σ<br />
P ref<br />
Σ<br />
−<br />
+<br />
R elec<br />
K I<br />
s<br />
7<br />
3<br />
1<br />
1+ sTt<br />
cflag>0<br />
cflag
Governor HYGOV<br />
Governor HYGOV<br />
Hydro Turbine-Governor Model<br />
Δω<br />
db 1<br />
1+<br />
sT<br />
1+<br />
sT<br />
n<br />
np<br />
P ref<br />
−<br />
+<br />
R<br />
−<br />
1<br />
1+ sTf<br />
G MAX<br />
1 1+ sT 2 1 3<br />
r<br />
rT s<br />
1+ sTg<br />
G MIN<br />
rate limit - V elm<br />
r<br />
db 2<br />
Δω<br />
D turb<br />
P GV<br />
N GV<br />
g<br />
GV<br />
P GV<br />
GV<br />
H − 1 4<br />
+<br />
Σ sT<br />
+<br />
W<br />
−<br />
Hdam=1<br />
qNL<br />
÷ π<br />
Σ π<br />
q/P GV<br />
Model supported by PSSE and PSLF<br />
Rperm shown as R, Rtemp shown as r<br />
GV0, PGV0...GV5, PGV5 are the x,y coordinates of N GV<br />
block<br />
Ttur, Tn, Tnp, db1, Eps, db2, Bgv0...Bgv5, Bmax, Tblade not implemented in Simulator<br />
At<br />
+<br />
π<br />
−<br />
Σ<br />
P mech<br />
States<br />
1 - Filter Output<br />
2 - Desired Gate<br />
3 - Gate<br />
4 - Turbine Flow
Governor HYGOV2<br />
Governor HYGOV2<br />
Hydro Turbine-Governor Model<br />
P ref<br />
Δω<br />
Speed<br />
K<br />
I<br />
+ sK<br />
s<br />
P<br />
+<br />
1<br />
−<br />
⎛1+<br />
sT ⎞ 2 1+<br />
sT 3<br />
1<br />
2<br />
Σ K −<br />
A ⎜ ⎟<br />
⎝ sT<br />
1+<br />
sT<br />
3 ⎠<br />
4<br />
−<br />
V GMAX<br />
1<br />
s<br />
5<br />
G MAX<br />
-V GMAX<br />
G MIN<br />
4<br />
sR<br />
R<br />
1<br />
temp<br />
T<br />
+ sT<br />
R<br />
R<br />
P mech<br />
P MAX<br />
6<br />
1−<br />
sT<br />
1+<br />
sT<br />
5<br />
6<br />
The G G limit is modeled as non-windup in PSSE but as a windup limit in Simulator.<br />
MAX<br />
MIN<br />
Model supported by PSSE<br />
States<br />
1 - Filter Output<br />
2 - Governor<br />
3 - Governor Speed<br />
4 - Droop<br />
5 - Gate<br />
6 - Penstock
Governor HYGOV4<br />
Governor HYGOV4<br />
Hydro Turbine-Governor Model<br />
Pref<br />
PMAX<br />
Δω<br />
db 1<br />
−<br />
+<br />
Σ<br />
−<br />
1<br />
1+ sTp<br />
1<br />
1<br />
T g<br />
U C<br />
U O<br />
1<br />
s<br />
2<br />
db 2<br />
GV<br />
Σ<br />
+<br />
+<br />
R perm<br />
3<br />
P MIN<br />
sT R<br />
r<br />
temp<br />
1+T s<br />
r<br />
π<br />
D turb<br />
P GV<br />
N GV<br />
GV<br />
PGV<br />
Bgv0...Bgv5, Bmax, Tblade not implemented in Simulator<br />
GV0, PGV0...GV5, PGV5 are the x,y coordinates of N GV<br />
block<br />
Model supported by PSLF<br />
q<br />
H − 1 4 +<br />
Σ sT<br />
+<br />
W<br />
−<br />
Hdam<br />
qNL<br />
÷ π<br />
Σ π<br />
q/P<br />
GV<br />
A t<br />
+<br />
−<br />
Σ<br />
P mech<br />
States<br />
1 - Velocity<br />
2 - Gate<br />
3 - Rtemp<br />
4 - T<br />
W
Governor HYST1<br />
Governor HYST1<br />
Hydro Turbine with Woodward Electro-Hydraulic PID Governor,<br />
Surge Tank, and Inlet Tunnel<br />
R<br />
perm<br />
1+ sT<br />
reg<br />
Σ +<br />
−<br />
P gen<br />
P ref<br />
Δω<br />
−<br />
+<br />
Σ<br />
1<br />
K<br />
p<br />
Ki<br />
+<br />
s<br />
2<br />
1<br />
1+ sTa<br />
4<br />
+<br />
Σ<br />
+<br />
1<br />
1+ sTa<br />
5<br />
sKd<br />
1+ sT<br />
a<br />
3<br />
G MAX<br />
1<br />
1+ sTb<br />
G MIN<br />
6<br />
P GV<br />
GV<br />
Gs ()<br />
7<br />
8<br />
9<br />
+<br />
Σ<br />
−<br />
P mech<br />
D turb<br />
Not yet implemented in Simulator<br />
Model supported by PSLF
Governor IEEEG1<br />
Governor IEEEG1<br />
IEEE Type 1 Speed-Governor Model<br />
Δω<br />
SPEED<br />
HP<br />
db 1<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
PMECH HP<br />
P M1<br />
K(1 + sT )<br />
1<br />
2<br />
−<br />
P ref<br />
+<br />
Σ<br />
2<br />
+ sT<br />
T<br />
1<br />
3<br />
−<br />
1<br />
U C<br />
U O<br />
P MIN<br />
1<br />
s<br />
P MAX<br />
1<br />
db 2<br />
P GV<br />
GV<br />
1<br />
1+<br />
sT<br />
4<br />
K 1<br />
1<br />
1+<br />
sT<br />
5<br />
K 3<br />
3 4 5<br />
1<br />
1+<br />
sT<br />
6<br />
K 5<br />
1<br />
1+<br />
sT<br />
7<br />
K 7<br />
K2<br />
K4<br />
K6<br />
K8<br />
6<br />
States<br />
1 - Governor Output<br />
2 - Lead-Lag<br />
3 - Turbine Bowl<br />
4 - Reheater<br />
5 - Crossover<br />
6 - Double Reheat<br />
Model supported by PSLF includes hysteresis that is read but not implemented in Simulator<br />
Model supported by PSSE does not include hysteresis and nonlinear gain<br />
GV1, PGV1...GV6, PGV6 are the x,y coordinates of P vs. GV block<br />
GV<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
PMECH LP<br />
P M2
Governor IEEEG2<br />
Governor IEEEG2<br />
IEEE Type 2 Speed-Governor Model<br />
P ref<br />
Δω<br />
Speed<br />
K(1 + sT2<br />
)<br />
(1 + sT )(1 + sT )<br />
1 3<br />
P MAX<br />
+<br />
2 − 1−<br />
sT4<br />
1<br />
Σ<br />
3<br />
1+<br />
0.5sT4<br />
P mech<br />
P MIN<br />
States<br />
1 - P mech<br />
2 - First Integrator<br />
3 - Second Integrator<br />
Model supported by PSSE
Governor IEEEG3_GE<br />
Governor IEEEG3_GE<br />
IEEE Type 3 Speed-Governor Model IEEEG3<br />
P REF<br />
P MAX<br />
Δω<br />
Speed<br />
db 1<br />
−<br />
+<br />
Σ<br />
Σ<br />
−<br />
+<br />
+<br />
1<br />
1+ sTP<br />
2<br />
R PERM<br />
1<br />
T G<br />
U C<br />
U O<br />
P MIN<br />
1<br />
s<br />
3<br />
db 2<br />
GV<br />
P GV<br />
GV<br />
PGV<br />
( 1+<br />
)<br />
K A sT<br />
TURB TURB W<br />
1+<br />
B<br />
TURB<br />
sT<br />
W<br />
P mech<br />
1<br />
4<br />
RTEMPsT<br />
1+ sT<br />
R<br />
R<br />
States<br />
PSLF model includes db1, db2, and Eps read but not implemented in Simulator<br />
Model supported by PSLF<br />
1 - P mech<br />
2 - Servomotor position<br />
3 - Gate position<br />
4 - Transient droop
Governor IEEEG3_PTI<br />
Governor_IEEEG3_PTI<br />
IEEE Type 3 Speed-Governor Model IEEEG3<br />
P REF<br />
U O<br />
P MAX<br />
Δω<br />
Speed<br />
−<br />
+<br />
Σ<br />
−<br />
1<br />
T (1 + sT )<br />
G<br />
P<br />
2<br />
1<br />
s<br />
3<br />
⎡<br />
⎛<br />
13 21<br />
a23 ⎢1<br />
+ ⎜a11<br />
− ⎟sTW<br />
a23<br />
⎣<br />
⎝<br />
1+<br />
a sT<br />
11<br />
a a<br />
W<br />
⎞<br />
⎠<br />
⎤<br />
⎥<br />
⎦<br />
1<br />
P mech<br />
U C<br />
P MIN<br />
Σ<br />
+<br />
+<br />
R PERM<br />
4<br />
RTEMPsT<br />
1+ sT<br />
R<br />
R<br />
States<br />
Model supported by PSSE<br />
1 - P mech<br />
2 - Servomotor position<br />
3 - Gate position<br />
4 - Transient droop
Governor IEESGO<br />
Governor IEESGO<br />
IEEE Standard Model IEEESGO<br />
P O<br />
Speed<br />
K1(1 + sT2)<br />
(1 + sT )(1 + sT )<br />
1 3<br />
1<br />
2<br />
−<br />
+<br />
Σ<br />
P MAX<br />
P MIN<br />
1<br />
1+<br />
sT<br />
4<br />
3<br />
1−<br />
K 2<br />
+<br />
Σ<br />
+ +<br />
P mech<br />
1−<br />
K 2<br />
K2<br />
1+ sT<br />
5<br />
K3<br />
1+ sT<br />
4 6 5<br />
Model supported by PSSE<br />
States<br />
1 - First Integrator<br />
2 - Second Integrator<br />
3 - Turbine T4<br />
4 - Turbine T5<br />
5 - Turbine T6
Governor PIDGOV<br />
Governor PIDGOV - Hydro Turbine and Governor Model PIDGOV<br />
Σ +<br />
−<br />
1<br />
P REF<br />
Δω<br />
Speed<br />
−<br />
R<br />
perm<br />
1+ sT<br />
+<br />
Σ<br />
reg<br />
2<br />
K<br />
p<br />
Ki<br />
+<br />
s<br />
0<br />
3<br />
sKd<br />
1+ sT<br />
a<br />
Feedback signal<br />
SBASE<br />
MBASE<br />
1<br />
1+ sTa<br />
5<br />
4<br />
P elec<br />
+<br />
Σ<br />
+<br />
1<br />
1+ sTa<br />
6<br />
States<br />
1 - Mechanical Output<br />
2 - Measured Delta P<br />
3 - PI<br />
4 - Reg1<br />
5 - Derivative<br />
6 - Reg2<br />
7 - Gate<br />
+<br />
Σ<br />
−<br />
1<br />
T b<br />
Vel MIN<br />
Vel MAX<br />
G MAX<br />
1<br />
s<br />
G MIN<br />
Power<br />
1<br />
2<br />
3<br />
Gate<br />
1−<br />
sTZ<br />
1+<br />
sT 2<br />
7 mech<br />
Z<br />
1<br />
T<br />
Z<br />
= ( A<br />
tw )*Tw<br />
+<br />
Σ<br />
−<br />
P<br />
Model supported by PSLF<br />
Model supported by PSSE<br />
D turb<br />
(G0,0), (G1,P1), (G2,P2), (1,P3) are x,y coordinates of Power vs. Gate function
Governor TGOV1<br />
Governor TGOV1<br />
Steam Turbine-Governor Model TGOV1<br />
V MAX<br />
PREF<br />
+<br />
Σ<br />
−<br />
1<br />
R<br />
1<br />
1+<br />
sT<br />
1<br />
1+<br />
sT<br />
1+<br />
sT<br />
2 1<br />
2<br />
3<br />
+<br />
Σ<br />
−<br />
Pmech<br />
V MIN<br />
Δω<br />
Speed<br />
D t<br />
States<br />
1 - Turbine Power<br />
2 - Valve Position<br />
Model supported by PSLF<br />
Model supported by PSSE
Governor TGOV2<br />
Governor TGOV2<br />
Steam Turbine-Governor with Fast Valving Model TGOV2<br />
V MAX<br />
K<br />
Reference<br />
+<br />
1<br />
1<br />
Σ<br />
R 1+<br />
sT1<br />
1+<br />
sT3<br />
1+ sTt<br />
−<br />
1<br />
1−<br />
K<br />
2<br />
v<br />
3<br />
4<br />
+<br />
+<br />
Σ<br />
−<br />
PMECH<br />
V MIN<br />
Δω<br />
Speed<br />
D t<br />
T :<br />
I<br />
Time to initiate fast valving.<br />
T<br />
A: Intercept valve, v, fully closed T<br />
A<br />
seconds after fast valving initiation.<br />
T<br />
B: Intercept valve starts to reopen T<br />
B<br />
seconds after fast valving initiation.<br />
T<br />
C: Intercept valve again fully open T<br />
C<br />
seconds after fast valving initiation.<br />
Intercept Valve Position<br />
1.<br />
0.<br />
T C<br />
T B<br />
T A<br />
( )<br />
T T T<br />
I I A<br />
( ) ( )<br />
+ T T<br />
I<br />
+ T + T<br />
B I C<br />
Time, seconds<br />
States<br />
1 - Throttle<br />
2 - Reheat Pressure<br />
3 - Reheat Power<br />
4 - Intercept Valve<br />
Model supported by PSSE
Governor TGOV3<br />
Governor TGOV3<br />
Modified IEEE Type 1 Speed-Governor with Fast Valving Model<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
P MECH<br />
+<br />
Δω<br />
Speed<br />
K(1 + sT )<br />
1<br />
1<br />
−<br />
P REF<br />
+<br />
Σ<br />
2<br />
+ sT1<br />
T3<br />
−<br />
1<br />
U C<br />
U O<br />
1<br />
s<br />
2<br />
P MIN<br />
P MAX<br />
1<br />
1+<br />
sT<br />
4<br />
K<br />
P RMAX<br />
1<br />
K2<br />
3<br />
+<br />
Σ<br />
−<br />
1<br />
sT<br />
5<br />
4<br />
v<br />
6<br />
Flow<br />
0.8<br />
0 0.3<br />
Intercept Valve<br />
Position<br />
1<br />
1+<br />
sT<br />
6<br />
K 3<br />
5<br />
T :<br />
I<br />
Time to initiate fast valving.<br />
T<br />
A: Intercept valve, v, fully closed T<br />
A<br />
seconds after fast valving initiation.<br />
T<br />
B: Intercept valve starts to reopen T<br />
B<br />
seconds after fast valving initiation.<br />
T<br />
C: Intercept valve again fully open T<br />
C<br />
seconds after fast valving initiation.<br />
Intercept Valve Position<br />
1.<br />
0.<br />
T C<br />
T B<br />
T A<br />
( )<br />
T T T<br />
I I A<br />
( ) ( )<br />
+ T T<br />
I<br />
+ T + T<br />
B I C<br />
Time, seconds<br />
States<br />
1 - LL<br />
2 - StateT3<br />
3 - StateT4<br />
4 - StateT5<br />
5 - StateT6<br />
6 - Intercept Valve<br />
Model supported by PSLF<br />
Model supported by PSSE<br />
Gv1,Pgv1 ... Gv6, Pgv6 are x,y coordinates of Flow vs. Intercept Valve Position function
Governor TGOV5<br />
Governor_TGOV5 - IEEE Type 1 Speed-Governor Model Modified to Include Boiler Controls<br />
+<br />
Σ<br />
+<br />
Σ<br />
+<br />
+<br />
+<br />
PMECH HP<br />
Σ<br />
+<br />
P M 1<br />
SPEED ω<br />
K 13<br />
Σ<br />
C 3<br />
K(1 + sT )<br />
−<br />
−<br />
1<br />
U O<br />
V MAX<br />
2<br />
∆ 1+ sT<br />
1+<br />
sT<br />
1<br />
T3<br />
s<br />
4<br />
+<br />
HP ∆f P<br />
U C<br />
O<br />
V MIN<br />
+<br />
MW<br />
Demand<br />
+<br />
+<br />
Σ<br />
KMW<br />
B<br />
P ELEC 1+ sTMW<br />
−<br />
−<br />
+<br />
Σ Desired Σ + Σ<br />
MW<br />
−<br />
−<br />
C2<br />
+ Σ π<br />
+<br />
P E<br />
(Pressure Error)<br />
PSP<br />
Model supported by PSSE<br />
P O<br />
K 12<br />
π<br />
Desired<br />
MW<br />
1<br />
K 11<br />
K 14<br />
−DPE<br />
R MIN<br />
K L<br />
DPE<br />
Dead Band<br />
+<br />
π<br />
Σ<br />
+ +<br />
R MAX<br />
1<br />
L MIN<br />
L MAX<br />
1<br />
s<br />
P O<br />
Fuel Dynamics<br />
m s<br />
K 1<br />
1<br />
1+<br />
sT<br />
5<br />
K 3<br />
1<br />
1+<br />
sT<br />
6<br />
K 5<br />
1<br />
1+<br />
sT<br />
K2<br />
K4<br />
K6<br />
K8<br />
C MAX<br />
+<br />
( 1+ )( 1+<br />
)<br />
s ( 1+<br />
sT )<br />
K sT sT<br />
I I R<br />
R1<br />
C MIN<br />
P T<br />
+<br />
Σ<br />
+<br />
P SP<br />
P E<br />
Σ<br />
K 10<br />
+<br />
Σ −<br />
−<br />
+<br />
1<br />
sC B<br />
P T<br />
+<br />
Σ<br />
Σ<br />
P D<br />
−<br />
+<br />
m s<br />
π<br />
π<br />
K 9<br />
7<br />
+<br />
K 7<br />
+<br />
Σ<br />
P M 2<br />
PMECH LP<br />
C 1<br />
− +<br />
Σ<br />
m s
Governor_TGOV5 - IEEE Type 1 Speed-Governor Model Modified to Include Boiler Controls<br />
States:<br />
1 – Governor Output<br />
2 – Speed Lead-Lag<br />
3 – Turbine Bowl<br />
4 – Reheater<br />
5 – Crossover<br />
6 – Double Reheat<br />
7 – P ELEC<br />
8 – P O<br />
9 – FuelDyn1<br />
10 – FuelDyn2<br />
11 – Controller1<br />
12 – Controller2<br />
13 – P D<br />
14 – Delay1<br />
15 – Delay2<br />
16 – Delay3<br />
17 – Delay4<br />
Model supported by PSSE
Governor URGS3T<br />
Governor URGS3T<br />
WECC Gas Turbine Model<br />
If (D >L ), then R = L<br />
e lse, R = R<br />
V INC LIM TRAT<br />
LIM<br />
MAX<br />
D V<br />
−<br />
Σ<br />
+<br />
5<br />
1<br />
1+ sTLTR<br />
States<br />
1 - Input LL<br />
2 - Integrator<br />
3 - Governor LL<br />
4 - Load Limit<br />
5 - Temperature<br />
P<br />
ref<br />
+<br />
Σ<br />
−<br />
db 1<br />
err<br />
Ka<br />
(1 + sT4<br />
)<br />
1+<br />
sT<br />
5<br />
1<br />
LV<br />
GATE<br />
−<br />
+<br />
Σ<br />
V MAX<br />
R LIM<br />
V MIN<br />
1<br />
sT<br />
1<br />
+<br />
2<br />
Σ<br />
−<br />
F IDLE<br />
1+<br />
AsT<br />
1+<br />
BsT<br />
2<br />
2<br />
3<br />
P GV<br />
GV<br />
db 2<br />
+<br />
Σ<br />
−<br />
P mech<br />
1<br />
R<br />
F IDLE<br />
Σ<br />
+ −<br />
+<br />
K T<br />
Σ<br />
−<br />
4<br />
+<br />
1<br />
1+<br />
sT<br />
3<br />
L MAX<br />
Speed<br />
D turb<br />
Model supported by PSSE<br />
GV1, PGV1...GV5, PGV5 are the x,y coordinates of P vs. GV block<br />
GV
Governor WT12T1<br />
Governor WT12T1<br />
Two-Mass Turbine Model for Type 1 and Type 2 Wind Generators<br />
From<br />
WT12A<br />
Model<br />
+<br />
+<br />
Σ<br />
−<br />
Σ<br />
+<br />
1<br />
2Hs<br />
t<br />
1<br />
ω base<br />
D shaft<br />
Σ<br />
+<br />
−<br />
Σ<br />
+<br />
−<br />
K shaft<br />
s<br />
2<br />
Damp<br />
+<br />
+<br />
Σ<br />
+<br />
Tmech<br />
Σ<br />
−<br />
−<br />
T elec<br />
1<br />
2Hs<br />
g<br />
3<br />
Speed<br />
ω base<br />
+<br />
Σ<br />
−<br />
ω base<br />
1<br />
s<br />
4 Rotor<br />
angle<br />
deviation<br />
H<br />
t<br />
=H×H<br />
H =H-H<br />
g<br />
t<br />
tfrac<br />
2H<br />
t×H g×(2π×Freq1)<br />
K<br />
shaft<br />
=<br />
H×ω0<br />
Model supported by PSSE<br />
2<br />
Initial rotor slip<br />
States<br />
1 - TurbineSpeed<br />
2 - ShaftAngle<br />
3 - GenSpeed<br />
4 - GenDeltaAngle
Governor W2301<br />
Governor W2301<br />
Woodward 2301 Governor and Basic Turbine Model<br />
P ref<br />
Speed<br />
Ref<br />
P elec<br />
Speed<br />
1<br />
1+ sTp<br />
1<br />
−<br />
+<br />
Σ<br />
Gamma<br />
1+ 2Beta ⋅s<br />
+<br />
Σ<br />
+<br />
−<br />
1+ 0.5Rho ⋅s<br />
Beta ⋅s(1.05 −Alpha)<br />
PI<br />
Controller<br />
2<br />
Gmax<br />
Valve Servo<br />
1<br />
1+ sTV<br />
Gmin<br />
3<br />
+<br />
Σ<br />
−<br />
gnl<br />
1+<br />
sKtT<br />
1+<br />
sT<br />
turb<br />
turb<br />
Turbine<br />
4<br />
+<br />
Σ<br />
−<br />
P mech<br />
D<br />
States<br />
1 - PelecSensed<br />
2 - PI<br />
Gain, Velamx read but not implemented in Simulator.<br />
Model supported by PSLF<br />
3 - Valve<br />
4 - Turbine
Governor WEHGOV<br />
Governor WEHGOV<br />
Woodward Electric Hydro Governor Model<br />
P ref<br />
0<br />
Feedback<br />
signal<br />
P elec<br />
+<br />
1<br />
7<br />
Σ<br />
−<br />
−<br />
ERR<br />
0<br />
−<br />
RpermPE<br />
+ sT<br />
1 PE<br />
SBASE<br />
MBASE<br />
(*)<br />
1<br />
Speed deadband<br />
sKD<br />
1+ sT<br />
Gmax+DICN<br />
K I<br />
s<br />
K P<br />
Gmin-DICN<br />
RpermGate<br />
D<br />
(*) Out = 0 if ERR < (Speed deadband)<br />
Out = ERR( I) − (Speed deadband) if ERR > (Speed deadband)<br />
Out = ERR( I) + (Speed deadband) if ERR
Governor WESGOV<br />
Governor WESGOV<br />
Westinghouse Digital Governor for Gas Turbine Model<br />
K P<br />
Δω<br />
Speed<br />
*<br />
Reference<br />
−<br />
+<br />
Σ<br />
−<br />
1<br />
I<br />
2<br />
+<br />
sT + Σ ( 1+ sT )( 1+<br />
sT )<br />
1<br />
1 2<br />
3<br />
4<br />
P mech<br />
P elec<br />
1<br />
1+ sTpe<br />
1<br />
**<br />
Droop<br />
Digital Control***<br />
*Sample hold with sample period defined by Delta TC.<br />
**Sample hold with sample period defined by Delta TP.<br />
***Maximum change is limited to A between sampling times.<br />
lim<br />
States<br />
1 - PEMeas<br />
2 - Control<br />
3 - Valve<br />
4 - PMech<br />
Model supported by PSSE<br />
A read but not implemented in Simulator<br />
lim
Governor WNDTGE<br />
Spdwl<br />
Wind<br />
Speed<br />
(glimv)<br />
WTG Ter<br />
Bus Freq<br />
Auxiliary<br />
Signal<br />
(psig)<br />
P dbr<br />
P elec<br />
Blade<br />
Pitch<br />
θ<br />
1<br />
Wind<br />
Power<br />
Model<br />
1<br />
1+ sTp<br />
P mech<br />
ω rotor<br />
PIMax & PIRat<br />
θ cmd<br />
PImin & -PIRat<br />
+<br />
Σ<br />
Governor WNDTGE<br />
Wind Turbine and Turbine Control Model for GE Wind Turbines<br />
+<br />
Rotor<br />
Model<br />
+<br />
Pitch<br />
Compensation<br />
Wind<br />
Power<br />
Model<br />
Σ<br />
+<br />
+<br />
+<br />
Σ<br />
fbus<br />
P avl<br />
2<br />
Anti-windup on<br />
Pitch Limits<br />
K + K / s<br />
pp<br />
ip<br />
ω<br />
ω<br />
+<br />
−<br />
Σ<br />
ω err<br />
Over/Under<br />
Speed Trip<br />
ω ref<br />
1<br />
1+ s5<br />
Anti-windup on<br />
Power Limits<br />
−<br />
Trip<br />
Signal<br />
Kptrq<br />
+ Kitrq<br />
/ s<br />
Pitch Control<br />
Torque<br />
Anti-windup on Pitch Limits Control<br />
+<br />
Kpc<br />
+ Kic<br />
/ s Σ<br />
4<br />
1<br />
1+ sTpav<br />
P avf<br />
12<br />
Frequency<br />
Response<br />
Curve<br />
if (fbus < fb OR<br />
fbus > fc)<br />
7<br />
9<br />
8<br />
10<br />
Active Power<br />
Control<br />
(optional)<br />
p<br />
set<br />
To gewtg<br />
Trip Signal<br />
(glimit)<br />
fflg<br />
1<br />
1<br />
6<br />
1<br />
apcflg<br />
0<br />
P<br />
min<br />
p<br />
stl<br />
P max<br />
− + +<br />
2<br />
0.67Pelec<br />
1.42Pelec<br />
0.51<br />
3<br />
Release<br />
PMAX<br />
if fflg set<br />
ω<br />
π<br />
P setAPC<br />
PWmax & PWrat<br />
1<br />
1+ sTpc<br />
5<br />
PWmin & -PWrat<br />
plim<br />
P ord<br />
Power Response<br />
Rate Limit<br />
P elec<br />
+ sTW<br />
Σ perr<br />
− 1+ sT<br />
W<br />
11<br />
wsho<br />
+ +<br />
Σ<br />
States<br />
1 - Pitch<br />
2 - Pitch Control<br />
3 - Torque Control<br />
4 - Pitch Compensation<br />
5 - Power Control<br />
6 - Speed Reference<br />
7 - Mech Speed<br />
8 - Mech Angle<br />
9 - Elect Speed<br />
10- ElectAngle<br />
11- Washout<br />
12- Active Power<br />
P ord<br />
Model supported by PSLF<br />
Apcflg is set to zero. Limits on states 2 and 3 and trip signal are not implemented.<br />
Simulator calculates initial windspeed Spdwl.
Governor WNDTGE<br />
Wind Turbine and Turbine Control Model for GE Wind Turbines<br />
Two - Mass Rotor Model<br />
+<br />
Σ<br />
ω 0<br />
+<br />
ω rotor<br />
Turbine Speed<br />
T<br />
mech<br />
T<br />
elec<br />
=<br />
ω<br />
T mech<br />
P<br />
mech<br />
T elec<br />
+ +<br />
+ ω<br />
mech 0<br />
−<br />
−<br />
−<br />
Pelec<br />
=<br />
ω + ω<br />
elec 0<br />
Σ<br />
Σ<br />
1<br />
2H<br />
1<br />
2H<br />
g<br />
D tg<br />
1<br />
s<br />
1<br />
s<br />
7<br />
ω 1 8<br />
base<br />
s<br />
−<br />
Σ<br />
+<br />
9 ω elec<br />
ω<br />
1 10<br />
base<br />
s<br />
∆ω<br />
ω mech<br />
+<br />
Σ<br />
ω<br />
Σ<br />
+<br />
K tg<br />
T shaft<br />
Generator Speed<br />
ω + 0<br />
Wind Power Model<br />
ρ<br />
( λθ)<br />
3<br />
P<br />
mech<br />
= Av C ,<br />
2 r w p<br />
λ = K ( ω/ v )<br />
b<br />
w<br />
4 4<br />
i j<br />
C<br />
p ( λθ , ) = ∑∑αθλ<br />
ij<br />
i= 0 j=<br />
0<br />
See charts for curve fit values<br />
Model supported by PSLF
Governor WNDTRB<br />
Governor WNDTRB<br />
Wind Turbine Control Model<br />
90<br />
Rotor speed<br />
ω +<br />
r<br />
Σ<br />
−<br />
KP<br />
(1 + sT1<br />
)<br />
1+<br />
sT<br />
2<br />
BPR MX<br />
1<br />
s<br />
1<br />
+ sT<br />
1 2 3<br />
cos<br />
1<br />
a<br />
π<br />
P mech<br />
ω ref<br />
-BPR MX<br />
0<br />
P wo<br />
States<br />
1 - Input<br />
2 - Blade Angle (Deg)<br />
Model supported by PSLF<br />
3 - Blade Pitch Factor
Governor WPIDHY<br />
Governor WPIDHY<br />
Woodward PID Hydro Governor Model<br />
States<br />
1 - Mechanical Output<br />
P ELEC<br />
P REF<br />
−<br />
+<br />
Σ<br />
REG<br />
+ sT<br />
1<br />
REG<br />
sK D<br />
Per Unit Output<br />
(MBASE)<br />
0<br />
( G1, P1)<br />
0 ( G ,0)<br />
1.0<br />
Gate Position (pu)<br />
(1, P3<br />
)<br />
( G , P )<br />
2 2<br />
2 - Measured Delta P<br />
3 - PID1<br />
4 - PID2<br />
5 - PID3<br />
6 - Velocity<br />
7 - Gate<br />
Δω<br />
Speed<br />
−<br />
+<br />
Σ<br />
2<br />
K P<br />
+<br />
Σ<br />
+ ( ) 2<br />
+<br />
1<br />
+ sT<br />
1<br />
A<br />
3<br />
4<br />
5<br />
1<br />
1+ sTB<br />
6<br />
Vel MAX<br />
Vel MIN<br />
1<br />
s<br />
7<br />
G MIN<br />
G MAX<br />
G P<br />
1−<br />
sTW<br />
TW<br />
1+<br />
s<br />
2<br />
1<br />
P MAX<br />
P MIN<br />
K i<br />
s<br />
D<br />
−<br />
+<br />
Σ<br />
P MECH<br />
Model supported by PSSE
Governor WSHYDD<br />
Governor WSHYDD<br />
WECC Double-Derivative Hydro Governor Model<br />
P ref<br />
Δω<br />
(Speed)<br />
db 1<br />
err<br />
1<br />
1+ sTD<br />
2 sK1<br />
3<br />
+ sT<br />
1<br />
F<br />
2<br />
sK2<br />
2<br />
1<br />
F<br />
( + sT )<br />
4 5<br />
+<br />
Σ<br />
+<br />
+<br />
−<br />
+<br />
Σ<br />
−<br />
K I<br />
s<br />
R<br />
6<br />
T<br />
T<br />
=<br />
0<br />
7<br />
( T<br />
T<br />
> 0)<br />
1<br />
1+ sTT<br />
P elec<br />
VEL OPEN<br />
P MAX<br />
+<br />
Σ<br />
−<br />
KG<br />
1+ sT<br />
P<br />
8<br />
1<br />
s<br />
9<br />
db 2<br />
GV GV 1+<br />
sA<br />
1+<br />
sB<br />
N GV<br />
P<br />
turb<br />
turb<br />
T<br />
T<br />
turb<br />
turb<br />
T rate<br />
MVA<br />
Pmech<br />
1<br />
VEL P MIN<br />
CLOSE<br />
Model supported by PSSE<br />
Inputs GV1, PGV1...GV5, PGV5 are the x,y coordinates of<br />
N GV<br />
block<br />
States<br />
1 - P 6 - Integrator<br />
mech<br />
2 - T 7 - P Sensed<br />
D<br />
1<br />
2<br />
2<br />
elec<br />
3 - K 8 - Valve<br />
4 - K first 9 - Gate<br />
5 - K second
Governor WSHYGP<br />
Governor WSHYGP<br />
WECC GP Hydro Governor Plus Model<br />
K P<br />
P ref<br />
Δω<br />
(Speed)<br />
db 1<br />
err<br />
−<br />
+<br />
Σ<br />
−<br />
1<br />
1+ sTD<br />
2<br />
K I<br />
s<br />
3<br />
+<br />
+<br />
Σ<br />
+<br />
CV<br />
T<br />
t<br />
=<br />
0<br />
sKD<br />
1+ sT<br />
f<br />
4<br />
R<br />
5<br />
( T<br />
t<br />
> 0)<br />
1<br />
1+ sTt<br />
P elec<br />
VEL OPEN<br />
P MAX<br />
+<br />
Σ<br />
−<br />
KG<br />
1+ sT<br />
P<br />
6<br />
1 7<br />
s db2<br />
GV 1+<br />
sA<br />
1+<br />
sB<br />
N GV<br />
P GV<br />
turb<br />
turb<br />
T<br />
T<br />
turb<br />
turb<br />
1<br />
T rate<br />
MVA<br />
P mech<br />
VEL P MIN<br />
CLOSE<br />
Model supported by PSSE<br />
GV1, PGV1...GV5, PGV5 are the x,y coordinates of<br />
N GV<br />
block<br />
States<br />
1 - P 5 - P Sensed<br />
mech<br />
D<br />
elec<br />
2 - T 6 - Valve<br />
3 - Integrator 7 - Gate<br />
4 - Derivative
Governor WSIEG1<br />
Governor WSIEG1<br />
WECC Modified IEEE Type 1 Speed-Governor Model<br />
GV 0<br />
P MAX<br />
Δω<br />
db 1<br />
err<br />
K<br />
1+<br />
sT2<br />
1+<br />
sT<br />
1<br />
1<br />
+<br />
CV − Σ<br />
−<br />
1<br />
T<br />
3<br />
U C<br />
U O<br />
P MIN<br />
1<br />
s<br />
2<br />
db 2<br />
GV<br />
N GV<br />
PGV<br />
1<br />
1+<br />
sT<br />
4<br />
K 1<br />
3<br />
1<br />
4<br />
1+<br />
sT<br />
5<br />
+<br />
Σ<br />
K 3<br />
+<br />
1<br />
1+<br />
sT<br />
6<br />
Σ<br />
K 5<br />
1<br />
1+<br />
sT<br />
K2<br />
K4<br />
K6<br />
K8<br />
+<br />
5<br />
+<br />
7<br />
+<br />
Σ<br />
+<br />
K 7<br />
6<br />
PMECH HP<br />
P M1<br />
States<br />
1 - Lead-lag<br />
2 - Governor Output<br />
3 - Turbine 1<br />
4 - Turbine 2<br />
5 - Turbine 3<br />
6 - Turbine 4<br />
Iblock = 1 : if P =0, P =Pinitial<br />
MIN<br />
MIN<br />
Iblock = 2 : if P =0, P =Pinitial<br />
MAX<br />
MAX<br />
Iblock = 3 : if P<br />
MIN<br />
=0, P<br />
MIN<br />
=Pinitial<br />
: if P =0, P =Pinitial<br />
MAX<br />
MAX<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
PMECH LP<br />
P M2<br />
GV1, PGV1...GV5, PGV5 are the x,y coordinates of<br />
Model supported by PSSE<br />
N GV<br />
block
Governor WT1T<br />
Governor WT1T<br />
Wind Turbine Model for Type-1 Wind Turbines<br />
P gen<br />
From<br />
Generator<br />
Model<br />
From<br />
Governor<br />
Model<br />
P mech<br />
−<br />
+ T 1<br />
Σ ÷<br />
acc<br />
2H<br />
−<br />
1<br />
s<br />
1<br />
ω<br />
To<br />
Generator<br />
Model and<br />
Governor<br />
Model<br />
Damp<br />
Type 1 WTG Turbine One - mass Model<br />
From<br />
Governor<br />
Model<br />
From<br />
Generator<br />
Model<br />
P mech<br />
P gen<br />
ω t<br />
÷<br />
÷<br />
ω g<br />
T mech<br />
T elec<br />
Model supported by PSLF<br />
+<br />
+<br />
−<br />
+<br />
Σ<br />
Σ<br />
−<br />
−<br />
1<br />
2H<br />
t<br />
D shaft<br />
1<br />
2H<br />
g<br />
1<br />
s<br />
∆ω tg<br />
1<br />
s<br />
1<br />
Σ<br />
3<br />
ω 0<br />
∆ω t<br />
+<br />
−<br />
∆ω g<br />
∆ω tg<br />
ω 0<br />
Type 1 WTG Turbine Two - mass Model<br />
Σ<br />
Σ<br />
1<br />
s<br />
ω t<br />
2<br />
ω g<br />
K<br />
1<br />
s<br />
4<br />
H<br />
t<br />
=H×H<br />
H =H-H<br />
g<br />
K =<br />
t<br />
t<br />
tfrac<br />
2H ×H ×(2π×Freq1)<br />
g<br />
H<br />
States<br />
1 - TurbineSpeed<br />
2 - ShaftAngle<br />
3 - GenSpeed<br />
4 - GenDeltaAngle<br />
2
Governor WT3T<br />
Governor WT3T<br />
Wind Turbine Model for Type-3 (Doubly-fed) Wind Turbines<br />
Blade<br />
Pitch<br />
θ<br />
From<br />
Pitch Control<br />
Model<br />
Simplified<br />
Aerodynamic Model<br />
+<br />
+<br />
Σ π K aero<br />
−<br />
θ 0<br />
−<br />
Σ<br />
P mo<br />
+<br />
P mech<br />
From<br />
Generator<br />
Model<br />
P gen<br />
−<br />
+ T 1<br />
Σ ÷<br />
acc<br />
2H<br />
−<br />
1<br />
s<br />
1<br />
ω<br />
To Pitch<br />
Control Model<br />
and Converter<br />
Control Model<br />
Damp<br />
Type 3 WTG Turbine One - mass Model<br />
Theta2⎛<br />
1 ⎞<br />
When windspeed > rated windspeed, blade pitch initialized to θ = ⎜1−<br />
2 ⎟<br />
0.75 ⎝ VW<br />
⎠<br />
P mech<br />
P gen<br />
ω t<br />
÷<br />
÷<br />
ω g<br />
T mech<br />
T elec<br />
Model supported by PSLF<br />
+<br />
+<br />
−<br />
+<br />
Σ<br />
Σ<br />
−<br />
−<br />
1<br />
2H<br />
t<br />
D shaft<br />
1<br />
2H<br />
g<br />
1<br />
s<br />
∆ω tg<br />
1<br />
s<br />
1<br />
Σ<br />
3<br />
ω 0<br />
∆ω t<br />
+<br />
−<br />
∆ω g<br />
∆ω tg<br />
ω 0<br />
Type 3 WTG Turbine Two - mass Model<br />
Σ<br />
Σ<br />
1<br />
s<br />
ω t<br />
2<br />
ω g<br />
K<br />
1<br />
s<br />
4<br />
States<br />
H<br />
t<br />
=H×Htfrac<br />
H<br />
g=H-H<br />
t<br />
2H<br />
t×H g×(2π×Freq1)<br />
K =<br />
H<br />
1 - TurbineSpeed<br />
2 - ShaftAngle<br />
3 - GenSpeed<br />
4 - GenDeltaAngle<br />
2
Governor WT3T1<br />
Governor WT3T1<br />
Mechanical System Model for Type 3 Wind Generator<br />
Blade<br />
Pitch<br />
From θ<br />
WT3P1 Model<br />
+ −<br />
Σ<br />
π<br />
+<br />
K aero<br />
−<br />
Σ<br />
+<br />
P<br />
aero<br />
initial<br />
Initial<br />
Pitch<br />
Angle<br />
θ 0<br />
1<br />
1+<br />
State 1<br />
+<br />
+<br />
Σ<br />
−<br />
T mech<br />
Σ<br />
+<br />
D shaft<br />
1<br />
2Hs<br />
t<br />
Damp<br />
1<br />
∆ω tg<br />
∆ω t<br />
+ +<br />
−<br />
Σ<br />
ω base<br />
−<br />
Σ<br />
K shaft<br />
s<br />
2<br />
H<br />
t<br />
=H×H<br />
H =H-H<br />
g<br />
K =<br />
shaft<br />
t<br />
tfrac<br />
2H ×H ×(2π×Freq1)<br />
t<br />
g<br />
H×ω<br />
0<br />
+<br />
Σ<br />
+<br />
2<br />
+<br />
T mech<br />
Σ<br />
T elec<br />
−<br />
−<br />
1<br />
2Hs<br />
g<br />
3<br />
∆ω g<br />
+<br />
ω 0<br />
Σ<br />
ω base<br />
ω g<br />
ω base<br />
−<br />
Initial rotor slip<br />
1<br />
s<br />
4<br />
Rotor<br />
Angle<br />
Deviation<br />
Model supported by PSSE
Governor BBGOV1<br />
European Governor Model BBGOV1<br />
PELEC<br />
SWITCH = 0<br />
SWITCH ≠ 0<br />
1<br />
1+<br />
sT<br />
1<br />
P O<br />
∆ω<br />
Speed<br />
f cut<br />
f cut<br />
K S<br />
−<br />
+<br />
Σ<br />
−<br />
−K LS<br />
K LS<br />
+<br />
−<br />
⎛ 1 ⎞ sKD<br />
Σ KP<br />
⎜ ⎟<br />
⎝1+<br />
sT 1+ sT<br />
N ⎠<br />
+<br />
D<br />
P MAX<br />
P MIN<br />
1<br />
s<br />
K<br />
K<br />
G<br />
LS<br />
1<br />
1+<br />
sT<br />
4<br />
1−<br />
K 2<br />
+<br />
Σ PMECH<br />
+ +<br />
1−<br />
K 3<br />
1<br />
2 3 4 5 6<br />
K2<br />
1+ sT<br />
5<br />
K3<br />
1+ sT<br />
6
Governor IVOGO<br />
IVO Governor Model IVOGO<br />
REF<br />
MAX 1<br />
MAX 3<br />
SPEED<br />
−<br />
+<br />
Σ<br />
( + )<br />
K A sT<br />
1 1 1<br />
A<br />
+ sT<br />
2 2<br />
( + )<br />
K A sT<br />
3 3 3<br />
A<br />
+ sT<br />
4 4<br />
( + )<br />
K A sT<br />
5 5 5<br />
A<br />
+ sT<br />
6 6<br />
MAX 5<br />
P MECH<br />
MIN 5<br />
MIN 1<br />
MIN 3<br />
1<br />
2 3 4 5 6
Governor TURCZT<br />
Czech Hydro and Steam Governor Model TURCZT<br />
Frequency Bias<br />
BSFREQ<br />
PELEC<br />
+<br />
Σ<br />
−<br />
dF REF<br />
SBASE<br />
MBASE<br />
f MIN<br />
f MAX<br />
f DEAD<br />
1<br />
1+ sTC<br />
K KOR<br />
N TREF<br />
K M<br />
+<br />
−<br />
Σ<br />
−<br />
Power Regulator<br />
K P<br />
N TMAX<br />
1<br />
sT I<br />
+<br />
Σ<br />
+<br />
Frequency Bias<br />
Hydro Converter<br />
1<br />
1+ sTEHP<br />
+<br />
Σ<br />
−<br />
Y<br />
REG<br />
Measuring Transducer<br />
N TMIN<br />
s DEAD<br />
K STAT<br />
Governor<br />
Y REG<br />
+<br />
Σ<br />
1<br />
−<br />
V MIN<br />
2 3 4 5 6<br />
Regulation Valves<br />
V MAX<br />
1<br />
T U<br />
G MIN<br />
G MAX<br />
1<br />
s<br />
SWITCH =1<br />
SWITCH = 0<br />
HP Part<br />
1<br />
1+ sTHP<br />
Reheater<br />
1<br />
1+ sTR<br />
1<br />
1 2 + sT H<br />
K HP<br />
1− KHP<br />
2<br />
3<br />
Steam Unit<br />
−<br />
+<br />
Σ<br />
+<br />
Σ<br />
+<br />
1<br />
K M<br />
1<br />
K M<br />
Hydro Unit<br />
PMECH<br />
PMECH<br />
Turbine
Governor URCSCT<br />
Combined Cycle on Single Shaft Model URCSCT<br />
Plant<br />
Output<br />
( MW )<br />
( STOUT C, POUT C)<br />
(Steam Turbine Rating,<br />
Steam & Gas Turbine Rating)<br />
( STOUT B, POUT B)<br />
( STOUT A, POUT A)<br />
Steam Turbine Output (MW)<br />
1<br />
2 3 4 5 6
Governor HYGOVM<br />
Hydro Turbine-Governor Lumped Parameter Model HYGOVM<br />
H SCH<br />
( V )<br />
SCHARE<br />
H LAKE<br />
( V )<br />
TUNNEL<br />
TUNL / A, TUNLOS<br />
Q TUN<br />
Q SCH<br />
H BSCH<br />
SURGE<br />
CHAMBER<br />
SCHLOS<br />
PENSTOCK<br />
PENL / A, PENLOS<br />
Q PEN<br />
TURBINE<br />
H TAIL<br />
( V )<br />
Hydro Turbine Governor Lumped Parameter Model
Governor HYGOVM<br />
Hydro Turbine-Governor Lumped Parameter Model HYGOVM<br />
2<br />
Q PEN<br />
π<br />
INPUT<br />
Gate +<br />
Relief Valve<br />
π<br />
A t<br />
O 2<br />
÷<br />
H BSCH<br />
2<br />
QPEN<br />
At<br />
2<br />
O<br />
PENLOS<br />
Σ<br />
+<br />
Σ<br />
+ − +<br />
+<br />
Σ<br />
−<br />
gv<br />
s PENL A<br />
OUTPUT<br />
+<br />
Σ<br />
+<br />
H LAKE<br />
+<br />
H BSCH<br />
−<br />
Σ −<br />
H TAIL<br />
2<br />
Q TUN<br />
Q PEN<br />
2<br />
Q<br />
SCH<br />
SCHLOS<br />
π<br />
H SCH<br />
gv<br />
sTUNL A<br />
Σ<br />
Q SCH<br />
−<br />
+<br />
Q TUN<br />
gv<br />
sTUNL A<br />
TUNLOS<br />
π<br />
Q PEN<br />
LEGEND :<br />
gv Gravitational acceleration<br />
TUNL/A Summation of length/cross section of tunnel<br />
SCHARE Surge chamber cross section<br />
PENLOS Penstock head loss coeficient<br />
FSCH Surge chamber orifice head loss coeficient<br />
PENL/A Summation of length/cross section of penstock,<br />
s croll case and draft tube<br />
A t<br />
O<br />
HSCH<br />
QPEN<br />
QTUN<br />
QSCH<br />
1 2 3 4 5 6<br />
Turbine flow gain<br />
Gate + relief valve opening<br />
Water level in surge chamber<br />
Penstock flow<br />
Tunnel flow<br />
Surge chamber flow<br />
Hydro Turbine Governor Lumped Parameter Model
Governor HYGOVM<br />
Hydro Turbine-Governor Lumped Parameter Model HYGOVM<br />
Jet Deflector<br />
MXJDOR<br />
+<br />
Σ<br />
−<br />
1<br />
T g<br />
MXJDCR<br />
1<br />
s<br />
Deflector<br />
Position<br />
Speed<br />
Reference<br />
+<br />
Speed<br />
R<br />
−<br />
Σ<br />
−<br />
Governor<br />
1<br />
1+ sTf<br />
G MIN<br />
G MAX<br />
1+<br />
sTr<br />
rsT<br />
0.01<br />
r<br />
+<br />
Σ<br />
+<br />
+<br />
Σ<br />
−<br />
1<br />
T g<br />
Gate Servo<br />
MXGTOR or<br />
MXBGOR<br />
MXGTCR or<br />
MXBGCR<br />
1<br />
s<br />
Gate<br />
Opening<br />
LEGEND :<br />
R Permanent droop<br />
r Temporary droop<br />
T<br />
r<br />
Governor time constant<br />
T<br />
f<br />
Filter time constant<br />
T<br />
g<br />
Servo time constant<br />
MXGTOR Maximum gate opening rate<br />
MXGTCR Maximum gate closing rate<br />
MXBGOR Maximum buffered gate opening rate<br />
1<br />
2 3 4 5 6<br />
RVLVCR +<br />
−<br />
Σ<br />
Relief Valve<br />
RVLMAX<br />
0<br />
1<br />
s<br />
Relief Valve<br />
Opening<br />
MXBGCR Maximum buffered gate closing opening<br />
GMAX Maximum gate limit<br />
GMIN Minimum gate limit<br />
RVLVCR Relief valve closing rate<br />
RVLMAX Maximum relief valve limit<br />
MXJDOR Maximum jet deflector opening rate<br />
MXJDCR Maximum jet deflector closing rate
Governor HYGOVT<br />
Hydro Turbine-Governor Traveling Wave Model HYGOVT<br />
H LAKE<br />
( V )<br />
H SCH<br />
( V )<br />
Q SCH<br />
SCHARE<br />
SURGE<br />
CHAMBER<br />
TUNNEL<br />
SCHLOS<br />
Q TUN<br />
H BSCH<br />
PENSTOCK<br />
Q PEN<br />
TURBINE<br />
H TAIL<br />
( V )<br />
Tunnel Inlet<br />
Constraint<br />
Time<br />
TUNNEL<br />
( TUNLGTH, TUNSPD, TUNARE, TUNLOS)<br />
Surge Chamber<br />
Constraints<br />
⎧<br />
⎪<br />
DELT * ICON( M 3)<br />
Flows<br />
Heads<br />
VAR(L+46)<br />
VAR(L+66)<br />
+ ⎨<br />
⎪⎩<br />
Hydro Turbine Governor Traveling Wave Model<br />
<br />
TUNLGTH / ( ICON( M + 2) + 1)<br />
Space<br />
VAR(L+45+ ICON(M +2))= Q<br />
VAR(L+65+ ICON(M +2))= H<br />
TUN<br />
BSCH
Governor HYGOVT<br />
Hydro Turbine-Governor Traveling Wave Model HYGOVT<br />
Surge Chamber<br />
Q TUN<br />
1<br />
+ Σ<br />
sSCHARE H +<br />
Q SCH<br />
SCH<br />
Σ<br />
+<br />
H BSCH<br />
Q PEN<br />
π<br />
2<br />
Q<br />
SCH<br />
SCHLOS<br />
Surge Chamber<br />
Constraints<br />
Time<br />
PENSTOCK<br />
( PENLGTH , PENSPD, PENARE, PENLOS)<br />
Turbine<br />
Constraint<br />
⎧<br />
⎪<br />
DELT * ICON( M 1)<br />
Flows<br />
Heads<br />
VAR(L+6)<br />
= Q<br />
VAR(L+26)<br />
= H<br />
PEN<br />
BSCH<br />
+ ⎨<br />
⎪⎩<br />
Hydro Turbine Governor Traveling Wave Model<br />
<br />
PENLGTH / ( ICON( M ) + 1)<br />
VAR(L+55+ ICON(M))<br />
VAR(L+25+ ICON(M))<br />
Space
Governor HYGOVT<br />
Hydro Turbine-Governor Traveling Wave Model HYGOVT<br />
Jet Deflector<br />
MXJDOR<br />
+<br />
Σ<br />
−<br />
1<br />
T g<br />
MXJDCR<br />
1<br />
s<br />
Deflector<br />
Position<br />
Speed<br />
Reference<br />
+<br />
Speed<br />
R<br />
−<br />
Σ<br />
−<br />
Governor<br />
1<br />
1+ sTf<br />
1<br />
G MIN<br />
G MAX<br />
1+<br />
sTr<br />
rsT<br />
2 3 4 5 6<br />
0.01 +<br />
Σ<br />
r<br />
+<br />
+<br />
Σ<br />
−<br />
1<br />
T g<br />
Gate Servo<br />
MXGTOR or<br />
MXBGOR<br />
MXGTCR or<br />
MXBGCR<br />
RVLVCR +<br />
LEGEND :<br />
R Permanent droop<br />
r Temporary droop<br />
T<br />
r<br />
Governor time constant<br />
T<br />
f<br />
Filter time constant<br />
T<br />
g<br />
Servo time constant<br />
MXGTOR Maximum gate opening rate<br />
MXGTCR Maximum gate closing rate<br />
MXBGOR Maximum buffered gate opening rate<br />
Hydro Turbine Governor Traveling Wave Model<br />
−<br />
Σ<br />
1<br />
s<br />
RVLMAX<br />
1<br />
s<br />
Gate<br />
Opening<br />
Relief Valve<br />
Relief Valve Opening<br />
0<br />
MXBGCR Maximum buffered gate closing opening<br />
GMAX Maximum gate limit<br />
GMIN Minimum gate limit<br />
RVLVCR Relief valve closing rate<br />
RVLMAX Maximum relief valve limit<br />
MXJDOR Maximum jet deflector opening rate<br />
MXJDCR Maximum jet deflector closing rate
Governor TGOV4<br />
Modified IEEE Type 1 Speed-Governor Model with PLU and EVA Model TGOV4<br />
Generator Power<br />
sT<br />
1+ sT<br />
REVA<br />
REVA<br />
EVA > Rate<br />
Level<br />
Y<br />
IV #1<br />
−<br />
Σ<br />
+<br />
EVA ><br />
Unbalance<br />
Level<br />
Y<br />
AND<br />
OR<br />
T IV1<br />
T IV 2<br />
IV #2<br />
Reheat Pressure<br />
CV #1<br />
Generator Current<br />
sT<br />
1+ sT<br />
RPLU<br />
RPLU<br />
PLU > Rate Timer<br />
Level<br />
Y<br />
T CV1<br />
T CV 2<br />
CV #2<br />
−<br />
+<br />
Σ<br />
PLU ><br />
Unbalance<br />
Level<br />
Y<br />
AND<br />
LATCH<br />
T CV 3<br />
T CV 4<br />
CV #3<br />
CV #4<br />
N<br />
1<br />
2 3 4 5 6<br />
PLU and EVA Logic Diagram
Governor TWDM1T<br />
Tail Water Depression Hydro Governor Model TWDM 1T<br />
VELM OPEN<br />
GATE MAX<br />
N REF<br />
Speed<br />
+<br />
+<br />
Σ<br />
−<br />
Σ<br />
+<br />
1<br />
1+ sTf<br />
e<br />
1+ sTr<br />
1<br />
rT r<br />
VELM CLOSE<br />
1<br />
s<br />
GATE MIN<br />
c<br />
1<br />
1+ sTg<br />
g<br />
R<br />
−<br />
÷ π Σ<br />
h<br />
+<br />
1<br />
sTW<br />
q<br />
+<br />
Σ<br />
−<br />
π<br />
+<br />
A 1.0<br />
1 qNL Dturb<br />
t<br />
Σ<br />
−<br />
0.<br />
PMECH<br />
1<br />
2 3 4 5 6<br />
Tail Water Depression Model 1<br />
Speed<br />
∆ f < F 2<br />
∆FREQ<br />
1<br />
+ sT<br />
1<br />
ft<br />
∆f<br />
s∆ f < sF 2<br />
TF 2LATCH<br />
AND<br />
OR<br />
Trip Tail<br />
Water<br />
Depression<br />
Measured Frequency<br />
∆ f < F 1<br />
TF1LATCH<br />
Tail Water Depression Trip Model
Governor TWDM2T<br />
Tail Water Depression Hydro Governor Model TWDM 2T<br />
∆ω<br />
SPEED −<br />
Σ<br />
+<br />
TWD Lock MAX<br />
1<br />
s<br />
+<br />
Σ<br />
+<br />
+<br />
LOGIC<br />
1<br />
( + sT ) 2<br />
1<br />
A<br />
V ELMX<br />
1<br />
1+ sTB<br />
G ATMX<br />
1<br />
s<br />
Reg<br />
+ sT<br />
1<br />
REG<br />
TWD Lock MIN<br />
K P<br />
Two<br />
Trip<br />
V ELMN<br />
G ATMN<br />
P REF<br />
−<br />
+<br />
Σ<br />
sK D<br />
P ELECT<br />
−<br />
÷ π Σ<br />
h<br />
+<br />
1<br />
sTW<br />
q<br />
+<br />
Σ<br />
−<br />
π<br />
+<br />
A 1.0<br />
t<br />
Σ<br />
−<br />
PMECH<br />
1 qNL<br />
0.<br />
Tail Water Depression Model 2<br />
D turb<br />
1<br />
2 3 4 5 6<br />
∆FREQ<br />
1<br />
+ sT<br />
1<br />
ft<br />
∆f<br />
∆ f < F 2<br />
s∆ f < sF 2<br />
TF 2LATCH<br />
AND<br />
OR<br />
Trip Tail<br />
Water<br />
Depression<br />
Measured Frequency<br />
∆ f < F 1<br />
TF1LATCH<br />
Tail Water Depression Trip Model
Governor SHAF25<br />
25 Masses Torsional Shaft Governor Model SHAF25<br />
State #<br />
State number containing delta speed<br />
Var #<br />
Variable number containing electrical torque<br />
Xd - Xdp X d - X' d<br />
Tdop<br />
T' do<br />
Exciter # Exciter number<br />
Gen #<br />
Generator number<br />
H 1 to H 25 H of mass 1 to H of mass 25<br />
PF 1 to PF 25 Power fraction of 1 to power fraction of 25<br />
D 1 to D 25 D of mass 1 to D of mass 25<br />
K 1-2 to K 24-25 K shaft mass 1-2 to K shaft 25-25<br />
Model supported by PSSE
Governor HYGOVR<br />
Fourth Order Lead-lag Governor and Hydro Turbine Model<br />
HYGOVR<br />
Δω<br />
db1<br />
-<br />
P ref<br />
+<br />
gmax<br />
CV<br />
1<br />
2 3 4 5 6<br />
P elec<br />
-<br />
R<br />
gmin<br />
10<br />
V elop<br />
P max<br />
db2<br />
CV<br />
+<br />
G V<br />
-<br />
7<br />
8<br />
G V<br />
V elcl<br />
P min<br />
States: 1 – Input Speed 5 – LL78 9 – Flow<br />
2 – LL12 6 – Governor 10 – P elec<br />
3 – LL34 7 – Velocity<br />
4 – LL56 8 – Gate<br />
P gv<br />
π<br />
H<br />
-<br />
q<br />
+<br />
π<br />
At<br />
Δω<br />
π<br />
Dturb<br />
-<br />
+ P mech<br />
q/P gv<br />
+<br />
9<br />
-<br />
H0<br />
qn1<br />
Model supported by PSLF
Governor WT2T<br />
Governor Model WT2T<br />
H<br />
Damp<br />
Htfrac<br />
Freq1<br />
DShaft<br />
Inertia<br />
Damping factor<br />
Turbine inertia fraction<br />
First shaft torsional frequency<br />
Shaft damping factor<br />
Model supported by PSLF
Line Relays SERIESCAPRELAY<br />
Line Relay Model SERIESCAPRELAY<br />
Tfilter<br />
tbOn<br />
tbOff<br />
V1On<br />
t1On<br />
V2On<br />
t2On<br />
V1Off<br />
t1Off<br />
V2Off<br />
t2Off<br />
Voltage filter time constant in sec.<br />
Switching time On in sec.<br />
Switching time Off in sec.<br />
First voltage threshold for switching series capacitor ON in p.u.<br />
First time delay for switching series capacitor ON in sec.<br />
Second voltage threshold for switching series capacitor ON in p.u.<br />
Second time delay for switching series capacitor ON in sec.<br />
First voltage threshold for switching series capacitor OFF in p.u.<br />
First time delay for switching series capacitor OFF in sec.<br />
Second voltage threshold for switching series capacitor OFF in p.u.<br />
Second time delay for switching series capacitor OFF in sec.<br />
Model supported by ???
Line Relays OOSLEN<br />
Out-of-step relay with 3 zones OOSLEN<br />
“Lens”<br />
x<br />
“Tomato”<br />
x<br />
Rf<br />
Rf<br />
Alpha<br />
R<br />
Alpha<br />
R<br />
Rr<br />
Wl<br />
Rr<br />
Wl<br />
Nf Nt Nfar<br />
Model supported by PSLF
Line Relays TLIN1<br />
Under-voltage or Under-frequency Relay Tripping Line Circuit Breaker(s) TLIN1<br />
Time<br />
t1<br />
v1<br />
Input<br />
Nf Nt Nfar<br />
Model supported by PSLF
Load Characteristic CIM5<br />
Load Characteristic CIM5<br />
Induction Motor Load Model<br />
Type 1<br />
Type 2<br />
R<br />
A<br />
+ jX<br />
A<br />
R<br />
A<br />
+ jX<br />
A<br />
jX 1<br />
jX m<br />
jX 1<br />
R 1<br />
s<br />
jX 2<br />
R 2<br />
s<br />
jX R<br />
m<br />
1<br />
s<br />
jX 2<br />
R 2<br />
s<br />
Impedances on Motor MVA Base<br />
Model Notes:<br />
1. To model single cage motor: set R = X = 0.<br />
breaker delay time cycles.<br />
Model supported by PSSE<br />
L<br />
D<br />
ω<br />
2 2<br />
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE<br />
3. Load Torque, T = T(1+ D )<br />
4. For motor starting, T=T is specified by the user in CON(J+18). For motor online studies, T=T is calculated<br />
|<br />
nom 0<br />
in the code during initialization and stored in VAR(L+4).<br />
5. V is the per unit voltage level below which the relay to trip the motor will begin timing. To display relay, set<br />
V =0<br />
|<br />
|<br />
6. T is the time in cycles for which the voltage must remain below the threshold for the relay to trip. T<br />
B<br />
is the
Load Characteristic CIM6<br />
Load Characteristic CIM6<br />
Induction Motor Load Model<br />
Type 1<br />
Type 2<br />
R<br />
A<br />
+ jX<br />
A<br />
R<br />
A<br />
+ jX<br />
A<br />
jX 1<br />
jX m<br />
jX 1<br />
R 1<br />
s<br />
jX 2<br />
R 2<br />
s<br />
jX R<br />
m<br />
1<br />
s<br />
jX 2<br />
R 2<br />
s<br />
Impedances on Motor MVA Base<br />
Model Notes:<br />
1. To model single cage motor: set R = X = 0.<br />
breaker delay time cycles.<br />
Model supported by PSSE<br />
2 2<br />
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE<br />
2<br />
E<br />
( ω ω ω)<br />
3. Load Torque, T = T A + B + C + D<br />
4.<br />
|<br />
L 0<br />
D<br />
For motor starting, T=T is specified by the user in CON(J+22). For motor online studies, T=T is calculated<br />
nom 0<br />
in the code during initialization and stored in VAR(L+4).<br />
5. V is the per unit voltage level below which the relay to trip the motor will begin timing. To display relay, set<br />
V =0<br />
|<br />
|<br />
6. T is the time in cycles for which the voltage must remain below the threshold for the relay to trip. T<br />
B<br />
is the
Load Characteristic CIMW<br />
Load Characteristic CIMW<br />
Induction Motor Load Model<br />
Type 1<br />
Type 2<br />
R<br />
A<br />
+ jX<br />
A<br />
R<br />
A<br />
+ jX<br />
A<br />
jX 1<br />
jX m<br />
jX 1<br />
R 1<br />
s<br />
jX 2<br />
R 2<br />
s<br />
jX R<br />
m<br />
1<br />
s<br />
jX 2<br />
R 2<br />
s<br />
Impedances on Motor MVA Base<br />
Model Notes:<br />
1. To model single cage motor: set R = X = 0.<br />
breaker delay time cycles.<br />
Model supported by PSSE<br />
2 2<br />
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE<br />
2<br />
E<br />
( )<br />
D<br />
2<br />
E<br />
L ω ω 0 ω<br />
−<br />
ω<br />
−<br />
ω<br />
−<br />
0 ω0<br />
3. Load Torque, T = T A + B + C + D where C0=1 A B D .<br />
4. This model cannot be used formotor starting studies. T is calculated in the code during initialization and<br />
stored in VAR(L+4).<br />
5. V is the per unit voltage level below which the relay to trip the motor will begin timing. To display relay, set<br />
|<br />
|<br />
V =0<br />
|<br />
6. T is the time in cycles for which the voltage must remain below the threshold for the relay to trip. T<br />
B<br />
is the<br />
0
Load Characteristic CLOD<br />
Load Characteristic CLOD<br />
Complex Load Model<br />
P + jQ<br />
Tap<br />
R + jX<br />
P<br />
O<br />
P = Load MW input on system base<br />
O<br />
M<br />
M<br />
I<br />
V<br />
I<br />
V<br />
K<br />
Constant P=<br />
P * P<br />
RO<br />
V<br />
MVA<br />
2<br />
Q=<br />
Q * V<br />
RO<br />
Large<br />
Motors<br />
Small<br />
Motors<br />
Discharge<br />
Motors<br />
Transformer<br />
Saturation<br />
Remaining<br />
Loads<br />
Model supported by PSSE
Load Characteristic EXTL<br />
Load Characteristic EXTL<br />
Complex Load Model<br />
P initial<br />
PMLTMX<br />
Q initial<br />
QMLTMX<br />
P actual<br />
π<br />
−<br />
Σ<br />
+<br />
1<br />
P initial<br />
K P<br />
s<br />
P MULT<br />
Q actual<br />
π<br />
−<br />
Σ<br />
+<br />
1<br />
Q initial<br />
K Q<br />
s<br />
Q MULT<br />
PMLTMN<br />
QMLTMN<br />
States:<br />
1 – P MULT<br />
2 - Q MULT
Load Characteristic IEEL<br />
Load Characteristic IEEL<br />
Complex Load Model<br />
load<br />
load<br />
n1 n2<br />
n3<br />
( 1 2 3 )( 1<br />
7 )<br />
n4<br />
n5 n6<br />
( 4 5 6 )( 1<br />
8 )<br />
P= P av + av + av + a∆f<br />
Q= Q av + av + av + a∆f<br />
Model supported by PSSE
Load Characteristic LDFR<br />
Load Characteristic LDFR<br />
Complex Load Model<br />
P<br />
Q<br />
I<br />
I<br />
p<br />
q<br />
= PO<br />
⎜ ⎟<br />
ωO<br />
m<br />
⎛ ω ⎞<br />
⎝<br />
⎠<br />
= QO<br />
⎜ ⎟<br />
ωO<br />
n<br />
⎛ ω ⎞<br />
⎝<br />
⎠<br />
= Ipo<br />
⎜ ⎟<br />
ωO<br />
= Iqo<br />
⎜ ⎟<br />
ωO<br />
s<br />
r<br />
⎛ ω ⎞<br />
⎝<br />
⎠<br />
⎛ ω ⎞<br />
⎝<br />
⎠<br />
Model supported by PSSE
Load Characteristic BPA INDUCTION MOTOR I<br />
Load Characteristic BPA Induction MotorI<br />
Induction Motor Load Model<br />
R<br />
S<br />
+ jX<br />
S<br />
jX R<br />
MECHANICAL<br />
LOAD<br />
jX m<br />
R R<br />
R = T, EMWS<br />
s<br />
Model Notes:<br />
2<br />
Mechanical Load Torque, ( )<br />
T= Aω<br />
+ Bω+<br />
CT O<br />
where C is calculated by the program such that<br />
ω + ω+ = 1.0<br />
2<br />
A B C<br />
ω = 1−ω<br />
Model in the public domain, available from BPA
Load Characteristic BPA TYPE LA<br />
Load Characteristic BPA Type LA<br />
Load Model<br />
2<br />
( ( ))<br />
P = P0 PV 1 * 1<br />
+ PV<br />
2<br />
+ P3+ P4 +∆f LDP<br />
Model in the public domain, available from BPA
Load Characteristic BPA TYPE LB<br />
Load Characteristic BPA Type LB<br />
Load Model<br />
2<br />
( )( )<br />
P = P0 PV<br />
1<br />
+ PV<br />
2<br />
+ P3 1 +∆f * L DP<br />
Model in the public domain, available from BPA
Load Characteristic DLIGHT<br />
Load Characteristic Model DLIGHT<br />
Real Power Coefficient<br />
Reactive Power Coefficient<br />
Breakpoint Voltage<br />
Extinction Voltage<br />
Real Power Coefficient<br />
Reactive Power Coefficient<br />
Breakpoint Voltage<br />
Extinction Voltage<br />
Model supported by PW
Load Characteristic LD1PAC<br />
Load Characteristic Model LD1PAC<br />
Pul<br />
TV<br />
Tf<br />
CompPF<br />
Vstall<br />
Rstall<br />
Xstall<br />
Tstall<br />
LFadj<br />
KP1 to KP2<br />
NP1 to NP2<br />
KQ1 to KQ2<br />
NQ1 to NQ2<br />
Vbrk<br />
Frst<br />
Vrst<br />
Trst<br />
CmpKpf<br />
CmpKqf<br />
Fraction of constant power load<br />
Voltage input time in sec.<br />
Frequency input time constant in sec.<br />
Compressor Power Factor<br />
Compressor Stalling Voltage in p.u.<br />
Compressor Stall resistance in p.u.<br />
Compressor Stall impedance in p.u.<br />
Compressor Stall delay time in sec.<br />
Vstall adjustment proportional lo loading<br />
factor<br />
Real power coefficient for running states,<br />
p.u.P/p.u.V<br />
Real power exponent for running states<br />
Reactive power coefficient for running<br />
states, p.u.Q/p.u.<br />
Reactive power exponent for running states<br />
Compressor motor breakdown voltage in<br />
p.u<br />
Restarting motor fraction<br />
Restart motor voltage in p.u.<br />
Restarting time delay in sec.<br />
Real power frequency sensitivity,<br />
p.u.P/p.u.<br />
Reactive power frequency sensitivity,<br />
p.u.Q/p.u.<br />
Vc1off<br />
Vc2off<br />
Vc1on<br />
Vc2on<br />
Tth<br />
Th1t<br />
Th2t<br />
fuvr<br />
uvtr1 to uvtr2<br />
ttr1 to ttr2<br />
Voltage 1 contactor disconnect load in p.u.<br />
Voltage 2 contactor disconnect load in p.u.<br />
Voltage 1 contactor re-connect load in p.u.<br />
Voltage 2 contactor re-connect load in p.u.<br />
Compressor heating time constant in sec.<br />
Compressor motors begin tripping<br />
Compressor motors finished tripping<br />
Fraction of compressor motors with<br />
undervoltage relays<br />
Undervoltage pickup level in p.u.<br />
Undervoltage definite time in sec.<br />
Model supported by PSLF
Load Characteristic WSCC<br />
Load Characteristic Model WSCC<br />
p1<br />
q1<br />
p2<br />
q2<br />
p3<br />
q3<br />
p4<br />
q4<br />
lpd<br />
lqd<br />
Constant impedance fraction in p.u.<br />
Constant impedance fraction in p.u.<br />
Constant current fraction in p.u.<br />
Constant current fraction in p.u.<br />
Constant power fraction in p.u.<br />
Constant power fraction in p.u.<br />
Frequency dependent power fraction in p.u.<br />
Frequency dependent power fraction in p.u.<br />
Real power frequency index in p.u.<br />
Reactive power frequency index in p.u.<br />
Model supported by PSLF
Load Characteristic CMPLD<br />
Composite Load Model CMPLD<br />
V sec_measured<br />
V sec_init<br />
Discrete Tap<br />
Change Control<br />
V 4 V sec<br />
V 3<br />
Polynomial load<br />
P far<br />
+ jQ far<br />
r 4<br />
x 4<br />
i 4<br />
i sec<br />
2 nd motor<br />
Polynomial load<br />
P sec + jQ sec<br />
1 st motor<br />
Model supported by PSLF
Load Characteristic CMPLDW<br />
Composite Load Model CMPLDW<br />
Substation<br />
System bus<br />
(230, 115, 69 – kV)<br />
Low-side<br />
Feeder<br />
R.X.<br />
Load<br />
Bus<br />
M<br />
Motor A<br />
LTC<br />
Bss Bf1 Bf2<br />
M<br />
Motor B<br />
M<br />
Motor C<br />
M<br />
Motor D<br />
Electronic Load<br />
Static Load<br />
Model supported by PSLF
Load Characteristic MOTORW<br />
Two-cage or One-cage Induction Machine for Part of a Bus Load Model MOTORW<br />
-<br />
⬚<br />
-<br />
1<br />
-<br />
1<br />
E' q<br />
+ ⬚ +<br />
T pp s<br />
-<br />
⬚<br />
1<br />
T ppp<br />
+<br />
+<br />
⬚<br />
+<br />
1<br />
s<br />
E'' q<br />
d-axis<br />
ω o SLIP T PO<br />
Lp-Lpp<br />
ω o<br />
SLIP<br />
+ i<br />
⬚<br />
Ls-Lp<br />
d<br />
+<br />
ω o<br />
SLIP T PO<br />
ω o<br />
SLIP<br />
+<br />
⬚<br />
-<br />
1<br />
-<br />
1<br />
E' d<br />
+ ⬚ +<br />
T pp s<br />
+<br />
⬚<br />
1<br />
T ppp<br />
+<br />
+<br />
-<br />
⬚<br />
1<br />
s<br />
E'' d<br />
q-axis<br />
Lp-Lpp<br />
+ I<br />
⬚<br />
Ls-Lp<br />
q<br />
-<br />
Model supported by PSLF
Load Relays DLSH<br />
Rate of Frequency Load Shedding Model DLSH<br />
f1 to f3<br />
t1 to t3<br />
Frac1 to frac3<br />
tb<br />
df1 to df3<br />
Frequency load shedding point<br />
Pickup time<br />
Fraction of load to shed<br />
Breaker time<br />
Rate of frequency shedding point<br />
Model supported by PSSE
Load Relays LDS3<br />
Underfrequency Load Shedding Model with Transfer Trip LDS3<br />
Tran Trip Obj<br />
SC<br />
f1 to f5<br />
t1 to t5<br />
tb1 to tb5<br />
Frac1 to frac5<br />
ttb<br />
Transfer Trip Object<br />
Shed Shunts<br />
Frequency load shedding point<br />
Pickup time<br />
Breaker time<br />
Fraction of load to shed<br />
Transfer trip breaker time<br />
Model supported by PSSE
Load Relays LDSH<br />
Underfrequency Load Shedding Model LDSH<br />
f1 to f3<br />
t1 to t3<br />
frac1 to frac3<br />
tb<br />
Frequency load shedding point<br />
Pickup time<br />
Fraction of load to shed<br />
Breaker time<br />
Model supported by PSSE
Load Relays LDST<br />
Time Underfrequency Load Shedding Model LDST<br />
f1 to f4<br />
z1 to z4<br />
tb<br />
frac<br />
freset<br />
tres<br />
Frequency load shedding point<br />
Nominal operating time<br />
Breaker time<br />
Fraction of load to shed<br />
Reset frequency<br />
Resetting time<br />
Model supported by PSSE
Load Relays LSDT1<br />
Definite-Time Underfrequency Load Shedding Relay Model LSDT1<br />
Tfilter<br />
tres<br />
f1 to f3<br />
t1 to t3<br />
tb1 to tb3<br />
frac1 to frac3<br />
Input transducer time constant<br />
Resetting time<br />
Frequency load shedding point<br />
Pickup time<br />
Breaker time<br />
Fraction of load to shed<br />
Bus Frequency<br />
Definite Time<br />
Characteristic<br />
Shed (p.u.)<br />
Model supported by PSLF
Load Relays LSDT2<br />
Definite-Time Undervoltage Load Shedding Relay Model LSDT2<br />
Rem Bus<br />
Voltage Mode<br />
Tfilter<br />
tres<br />
v1 to v3<br />
t1 to t3<br />
tb1 to tb3<br />
frac1 to frac3<br />
Remote Bus<br />
Voltage mode: 0 for deviation; 1 for absolute<br />
Input transducer time constant<br />
Resetting time<br />
Voltage load shedding point<br />
Pickup time<br />
Breaker time<br />
Fraction of load to shed<br />
Bus Frequency<br />
Definite Time<br />
Characteristic<br />
Shed (p.u.)<br />
Model supported by PSLF
Load Relays LSDT8<br />
Definite-Time Underfrequency Load Shedding Relay Model LSDT8<br />
Tfilter<br />
tres<br />
f1 to f3<br />
t1 to t3<br />
tb1 to tb3<br />
frac1 to frac3<br />
df1 to df3<br />
Input transducer time constant<br />
Resetting time<br />
Frequency load shedding point<br />
Pickup time<br />
Breaker time<br />
Fraction of load to shed<br />
Rate of frequency shedding point<br />
Bus Frequency<br />
Definite Time<br />
Characteristic<br />
Shed (p.u.)<br />
Model supported by PSLF
Load Relays LSDT9<br />
Definite Time Underfrequency Load Shedding Relay Model LSDT9<br />
Tfilter<br />
tres<br />
f1 to f9<br />
t1 to t9<br />
tb1 to tb9<br />
frac1 to frac9<br />
Input transducer time constant<br />
Resetting time<br />
Frequency load shedding point<br />
Pickup time<br />
Breaker time<br />
Fraction of load to shed<br />
Bus Frequency<br />
Definite Time<br />
Characteristic<br />
Shed (p.u.)<br />
Model supported by PSLF
Load Relays LVS3<br />
Undervoltage Load Shedding Model with Transfer Trip LVS3<br />
FirstTran Trip Obj<br />
SecondTran Trip Obj<br />
SC<br />
v1 to v5<br />
t1 to t5<br />
tb1 to tb5<br />
Frac1 to frac5<br />
ttb1 to ttb2<br />
First Transfer Trip Object<br />
First Transfer Trip Object<br />
Shed Shunts<br />
Voltage load shedding point<br />
Pickup time<br />
Breaker time<br />
Fraction of load to shed<br />
Transfer trip breaker time<br />
Model supported by PSSE
Load Relays LVSH<br />
Undervoltage Load Shedding Model LVSH<br />
v1 to v3<br />
t1 to t3<br />
frac1 to frac3<br />
tb<br />
Voltage load shedding point<br />
Pickup time<br />
Fraction of load to shed<br />
Breaker time<br />
Model supported by PSSE
Machine Model CBEST<br />
EPRI Battery Energy Storage Model CBEST<br />
P INIT<br />
P MAX<br />
I ACMAX V AC<br />
P AUX<br />
1<br />
MMMMM<br />
+<br />
+ P AC<br />
⬚ 1 1<br />
MMMMM<br />
SSSSS<br />
P OUT<br />
-P MAX<br />
- I ACMAX V AC<br />
P OUT<br />
P OUT > 0<br />
P OUT<br />
< 0<br />
O UU E FF<br />
s<br />
I NN E FF<br />
s<br />
5<br />
+<br />
⬚<br />
+<br />
4<br />
E OUT<br />
States:<br />
1 – VLL1<br />
2 – VLL2<br />
3 – IQ<br />
4 – EnergyIn<br />
5 - EnergyOut<br />
E COMP<br />
-<br />
+<br />
V REF<br />
+<br />
⬚<br />
-<br />
V MAX<br />
(1 + sT 1 )(1 + sT 1 )<br />
(1 + sT 3 )(1 + sT 4 )<br />
1 2<br />
K AAA<br />
s<br />
I QMAX<br />
I Q<br />
3<br />
π<br />
MMMMM<br />
SSSSS<br />
P OUT<br />
V OTHSG<br />
V MIN<br />
DROOP<br />
-I QMAX<br />
2<br />
I QQQQ = I AAAAA − P 2<br />
AA<br />
<br />
V AA<br />
Model supported by PSSE
Machine Model CIMTR1<br />
Induction Generator Model CIMTR1<br />
Tp<br />
Tpp<br />
H<br />
X<br />
Xp<br />
Xpp<br />
Xl<br />
E1<br />
SE1<br />
E2<br />
SE2<br />
Switch<br />
Ra<br />
T' - Transient rotor time constant<br />
T'' – Sub-transient rotor time constant in sec.<br />
Inertia constant in sec.<br />
Synchronous reactance<br />
X' – Transient Reactance<br />
X'' – Sub-transient Reactance<br />
Stator leakage reactance in p.u.<br />
Field voltage value E1<br />
Saturation value at E1<br />
Field voltage value E2<br />
Saturation value at E2<br />
Switch<br />
Stator resistance in p.u.<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
5 – Speed wr<br />
Model supported by PSSE
Machine Model CIMTR2<br />
Induction Motor Model CIMTR2<br />
Tp<br />
Tpp<br />
H<br />
X<br />
Xp<br />
Xpp<br />
Xl<br />
E1<br />
SE1<br />
E2<br />
SE2<br />
D<br />
T' - Transient rotor time constant<br />
T'' – Sub-transient rotor time constant in sec.<br />
Inertia constant in sec.<br />
Synchronous reactance<br />
X' – Transient Reactance<br />
X'' – Sub-transient Reactance<br />
Stator leakage reactance in p.u.<br />
Field voltage value E1<br />
Saturation value at E1<br />
Field voltage value E2<br />
Saturation value at E2<br />
Damping<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
5 – Speed wr<br />
Model supported by PSSE
Machine Model CIMTR3<br />
Induction Generator Model CIMTR3<br />
Tp<br />
T' - Transient rotor time constant<br />
Tpp<br />
T'' – Sub-transient rotor time constant in sec.<br />
H<br />
Inertia constant in sec.<br />
X<br />
Synchronous reactance<br />
Xp<br />
X' – Transient Reactance<br />
Xpp<br />
X'' – Sub-transient Reactance<br />
Xl<br />
Stator leakage reactance in p.u.<br />
E1<br />
Field voltage value E1<br />
SE1<br />
Saturation value at E1<br />
E2<br />
Field voltage value E2<br />
Switch<br />
Switch<br />
SYN-POW Mechanical power at synchronous speed (p.u. > 0)<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
5 – Speed wr<br />
Model supported by PSSE
Machine Model CIMTR4<br />
Induction Motor Model CIMTR4<br />
Tp<br />
T' - Transient rotor time constant<br />
Tpp<br />
T'' – Sub-transient rotor time constant in sec.<br />
H<br />
Inertia constant in sec.<br />
X<br />
Synchronous reactance<br />
Xp<br />
X' – Transient Reactance<br />
Xpp<br />
X'' – Sub-transient Reactance<br />
Xl<br />
Stator leakage reactance in p.u.<br />
E1<br />
Field voltage value E1<br />
SE1<br />
Saturation value at E1<br />
E2<br />
Field voltage value E2<br />
D<br />
Damping<br />
SYN-TOR Synchronous torque (p.u. < 0)<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
5 – Speed wr<br />
Model supported by PSSE
Machine Model CSTATT<br />
Static Condenser (STATCON) Model CSTATT<br />
V REF<br />
V MAX<br />
Limit Max<br />
|V|<br />
-<br />
+<br />
+<br />
⬚<br />
-<br />
(1 + sT 1 )(1 + sT 1 )<br />
(1 + sT 3 )(1 + sT 4 )<br />
1 2<br />
K<br />
s<br />
VAR(L)<br />
3<br />
+<br />
⬚<br />
-<br />
1<br />
X t<br />
MMMMM<br />
SSSSS<br />
ISTATC<br />
VAR(L+1)<br />
V OTHSG<br />
V MIN<br />
DROOP<br />
Limit Min<br />
E T<br />
Limit Max = V T + X T I CMAX0<br />
Limit Min = V T + X T I LMAX0<br />
Limit Max ≤ E limit<br />
Where:<br />
I CMAX0 = I CMAX when V T ≥ VCUTOUT<br />
States:<br />
1 – Regulator 1<br />
2 – Regulator 2<br />
3 – Thyristor<br />
I CCCC0 = I CCCC ∙ V T<br />
V CCCCCC<br />
otherwise<br />
I LMAX0<br />
= I LMAX<br />
when V T<br />
≥ VCUTOUT<br />
I LLLL0 = I LLLL ∙ V T<br />
V CCCCCC<br />
otherwise<br />
Note: |V| is the voltage magnitude on the high side of generator step-up transformer, if present.<br />
Model supported by PSSE
Machine Model GENCLS_PLAYBACK<br />
Machine Model GENCLS_PLAYBACK<br />
Synchronous machine represented by “classical” modeling or<br />
Thevenin Voltage Source to play Back known<br />
voltage/frequency signal<br />
Recorded<br />
Voltage<br />
Z<br />
ab<br />
= 0.03<br />
on 100 MVA base<br />
Responding<br />
System<br />
A<br />
B<br />
States:<br />
1 – Angel<br />
2 – Speed w<br />
gencls<br />
I ppd<br />
B<br />
Responding<br />
System<br />
gencls<br />
I ppd<br />
A<br />
Z<br />
ab<br />
= 0.03<br />
on 100 MVA base<br />
B<br />
Responding<br />
System<br />
Model supported by PSLF
Machine Model GENDCO<br />
Round Rotor Generator Model Including DC Offset Torque<br />
Component GENDCO<br />
H<br />
D<br />
Ra<br />
Xd<br />
Xq<br />
Xdp<br />
Xqp<br />
Xl<br />
Tdop<br />
Tqop<br />
Tdopp<br />
Tqopp<br />
S(1.0)<br />
S(1.2)<br />
Ta<br />
Inertia constant in sec.<br />
Damping<br />
Stator resistance in p.u.<br />
X d – Direct axis synchronous reactance<br />
X q – Quadrature axis synchronous reactance<br />
X' d – Direct axis synchronous reactance<br />
X' q – Quadrature axis synchronous reactance<br />
Stator leakage reactance in p.u.<br />
T' do – Open circuit direct axis transient time constant<br />
T' qo – Quadrature axis transient time constant<br />
T'' do – Open circuit direct axis subtransient time constant<br />
T'' qo – Quadrature axis subtransient time constant<br />
Saturation factor at 1.0 p.u. flux<br />
Saturation factor at 1.2 p.u. flux<br />
T a<br />
Model supported by PSSE
Machine Model GEPWTwoAxis<br />
Model GENPWTwoAxis<br />
H<br />
D<br />
Ra<br />
Xd<br />
Xq<br />
Xdp<br />
Xqp<br />
Tdop<br />
Tqop<br />
Inertia constant in sec.<br />
Damping<br />
Stator resistance in p.u.<br />
X d – Direct axis synchronous reactance<br />
X q – Quadrature axis synchronous reactance<br />
X' d – Direct axis synchronous reactance<br />
X' q – Quadrature axis synchronous reactance<br />
T' do – Open circuit direct axis transient time constant<br />
T' qo – Quadrature axis transient time constant<br />
States:<br />
1 – Angel<br />
2 – Speed w<br />
3 – Eqp<br />
4 – Edp<br />
Model supported by PW
Machine Model GENIND<br />
Two Cage or One Cage Induction Generator Model GENIND<br />
+<br />
ψ dr2<br />
⬚<br />
-<br />
ω o SLIP<br />
ω o ∙ R r2<br />
L ll2<br />
+<br />
-<br />
⬚<br />
Ψ qr2<br />
1<br />
L ll2<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
5 – Speed wr<br />
ψ dr1<br />
Model supported by PSLF<br />
ω o<br />
SLIP<br />
ω o ∙ R<br />
+ r1<br />
⬚<br />
⬚<br />
L ll1<br />
+<br />
-<br />
Ψ qr1<br />
ω o ∙ R<br />
+ r1<br />
⬚<br />
⬚<br />
L ll1 +<br />
-<br />
Ψ qr2<br />
2<br />
ψ mm<br />
+ ψ<br />
2<br />
mm<br />
ω o<br />
SLIP<br />
ω o<br />
SLIP<br />
ω o ∙ R<br />
+ r2<br />
⬚<br />
⬚<br />
L ll2<br />
+<br />
-<br />
-<br />
+<br />
+<br />
S e<br />
Ψ m<br />
Ψ qr1<br />
Ψ dr1<br />
Ψ dr2<br />
1<br />
L ll1<br />
1<br />
L ll1<br />
+<br />
⬚<br />
+<br />
K sat = 1 + Se(ψ m<br />
)<br />
1<br />
L ll2<br />
⬚<br />
+<br />
+<br />
L'' m sat<br />
Ψ mq<br />
′′<br />
L m sss =<br />
L'' m sat<br />
Ψ md<br />
K sss<br />
+<br />
⬚<br />
-E'' d = ψ' q<br />
L'' m sat<br />
1<br />
⁄ L m + 1⁄ L ll1 + 1⁄<br />
L ll2<br />
⬚<br />
+<br />
-<br />
-<br />
L'' m sat<br />
E'' q<br />
= ψ' d<br />
L m = L s − L l<br />
′<br />
L m = 1/(1/L m + 1/L ll1 ) = L ′ − L l<br />
′′<br />
L m = 1/(1/L m + 1/L ll1 + 1/L ll2 )<br />
= L ′′ − L l<br />
T ′ ′<br />
o = L ll1 ∙ L m /(ω o ∙ R r1 ∙ L m )<br />
= (L ll1 + L m )/(ω o ∙ R r1 )<br />
T ′′ ′<br />
o = L ll2 ∙ L m /(ω o ∙ R r2 ∙ L ′′ m )<br />
′<br />
= (L ll2 + L m )/(ω o ∙ R r2 )<br />
i qs<br />
i ds
Machine Model GENROE<br />
Round Rotor Generator Model GENROE<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
3 – Eqp<br />
4 – PsiDp<br />
5 – PsiQpp<br />
6 – Edp<br />
H<br />
D<br />
Ra<br />
Xd<br />
Xq<br />
Xdp<br />
Xqp<br />
Xdpp<br />
Xl<br />
Tdop<br />
Tqop<br />
Tdopp<br />
Tqopp<br />
S(1.0)<br />
S(1.2)<br />
Rcomp<br />
Xcomp<br />
Inertia constant in sec.<br />
Damping factor in p.u.<br />
Stator resistance in p.u.<br />
X d – Direct axis synchronous reactance<br />
X q – Quadrature axis synchronous reactance<br />
X' d – Direct axis synchronous reactance<br />
X' q – Quadrature axis synchronous reactance<br />
X'' d – Direct axis subtransient reactacne<br />
Stator leakage reactance in p.u.<br />
T' do – Open circuit direct axis transient time constant<br />
T' qo – Quadrature axis transient time constant<br />
T'' do – Open circuit direct axis subtransient time constant<br />
T'' qo – Quadrature axis subtransient time constant<br />
Saturation factor at 1.0 p.u. flux<br />
Saturation factor at 1.2 p.u. flux<br />
Compensating resistance for voltage control in p.u.<br />
Compensating reactance for voltage control in p.u.<br />
Model supported by PSSE
Machine Model GENSAE<br />
Salient Pole Generator Model GENSAE<br />
States:<br />
1 – Angle<br />
2 – Speed w<br />
3 – Eqp<br />
4 – PsiDp<br />
5 – PsiQpp<br />
H<br />
D<br />
Ra<br />
Xd<br />
Xq<br />
Xdp<br />
Xqp<br />
Xdpp<br />
Xl<br />
Tdop<br />
Tqop<br />
Tdopp<br />
Tqopp<br />
S(1.0)<br />
S(1.2)<br />
Rcomp<br />
Xcomp<br />
Inertia constant in sec.<br />
D<br />
Stator resistance in p.u.<br />
X d – Direct axis synchronous reactance<br />
X q – Quadrature axis synchronous reactance<br />
X' d – Direct axis synchronous reactance<br />
X' q – Quadrature axis synchronous reactance<br />
X'' d – Direct axis subtransient reactacne<br />
Stator leakage reactance in p.u.<br />
T' do – Open circuit direct axis transient time constant<br />
T' qo – Quadrature axis transient time constant<br />
T'' do – Open circuit direct axis subtransient time constant<br />
T'' qo – Quadrature axis subtransient time constant<br />
Saturation factor at 1.0 p.u. flux<br />
Saturation factor at 1.2 p.u. flux<br />
Compensating resistance for voltage control in p.u.<br />
Compensating reactance for voltage control in p.u.<br />
Model supported by PSSE
Machine Model GENTPJ<br />
Generator Represented by Uniform Inductance Ratios Rotor<br />
Modeling to Match WSCC Type F Model GENTPJ<br />
L d − L d<br />
′<br />
L d<br />
′<br />
− L d<br />
′′<br />
S e<br />
E fd<br />
+<br />
+<br />
⬚<br />
-<br />
1<br />
E' q<br />
S<br />
′<br />
e<br />
+<br />
1<br />
⬚<br />
sT ′′<br />
dd<br />
sT dd<br />
-<br />
′′<br />
L d − L d<br />
′ ′′<br />
L d − L d<br />
-<br />
L d<br />
′<br />
− L d<br />
′′<br />
E'' q<br />
i d<br />
φ'' d<br />
S e = 1 + ffffφ aa + K ii ∙ I t ∙ ssss(i d )<br />
Q – Axis similar except:<br />
S e = 1 + L q<br />
L d<br />
ffffφ aa + K ii ∙ I t ∙ ssss(i d )<br />
States:<br />
1 – Angle<br />
2 – Spped w<br />
3 – Eqp<br />
4 – Eqpp<br />
5 – Edp<br />
6 – Edpp<br />
Model supported by PSLF
Machine Model STCON<br />
Static Synchronous Condenser Model STCON<br />
V int<br />
∠ ∥θ<br />
|i term<br />
|<br />
If q term<br />
≥ 0<br />
5<br />
V max<br />
If q term<br />
≤ 0<br />
5<br />
V min<br />
-<br />
+<br />
⬚<br />
V t<br />
∠ ∥θ<br />
K ii<br />
s<br />
K ii<br />
+<br />
V ctr<br />
i term<br />
+<br />
R<br />
⬚<br />
If S4 5 > I max<br />
+ ⬚<br />
If S4 5 < (I<br />
s<br />
max<br />
- I mxeps<br />
)<br />
and<br />
-<br />
v term<br />
> v thresh<br />
-<br />
X t<br />
1<br />
1 + sT f<br />
+<br />
⬚<br />
i term<br />
, q term<br />
p term = 0<br />
5<br />
K ii<br />
s<br />
K ii<br />
If S4 5 > I max<br />
+ If S4 5 < (I<br />
⬚<br />
max<br />
- I mxeps<br />
)<br />
s<br />
and<br />
-<br />
v term<br />
> v thresh<br />
3<br />
4<br />
K ii<br />
s<br />
+<br />
1<br />
- ⬚ + ⬚<br />
1 + sT f<br />
1<br />
+ +<br />
K i<br />
s<br />
V ref<br />
+<br />
V min<br />
+<br />
V max<br />
-<br />
-<br />
V sig<br />
⬚<br />
⬚<br />
6<br />
K ii<br />
s<br />
K ii<br />
s<br />
V MIN<br />
4<br />
3<br />
K p<br />
+<br />
V MAX<br />
q set<br />
⬚ -<br />
2<br />
q term<br />
π<br />
U MAX<br />
= S2 3<br />
U MAX<br />
U MIN<br />
U MIN<br />
= S3 4<br />
V int<br />
States:<br />
1 – Vsens<br />
2 – Integrator<br />
3 – Umax<br />
4 – Umin<br />
5 – I termSens<br />
6 – Qerr<br />
Model supported by PSLF
Machine Model SVCWSC<br />
Static Var Device Model SVCWSC<br />
Voltage Clamp Logic<br />
If V bus<br />
< V1 vd<br />
, K vc<br />
= 0.<br />
If V bus<br />
> V2 vd<br />
for T dvcl<br />
sec., K vc<br />
= 1.<br />
V1 MAX<br />
K vc·V2 MAX<br />
B MAX<br />
V bus<br />
+<br />
⬚<br />
-<br />
X C<br />
Ve MAX<br />
1 + sT C<br />
1 + sT<br />
-<br />
s2 1 + sT s4<br />
Fast<br />
1<br />
⬚ ⬚<br />
K<br />
1 + sT s1 +<br />
SVS Over<br />
1 + sT s3 b + sT s5 1 + sT<br />
Ride<br />
s6<br />
+ + Ve MIN<br />
1 B<br />
V<br />
V1 2 MIN<br />
ref V scs<br />
+ V MIN<br />
K<br />
3<br />
vc·V2<br />
MIN<br />
4<br />
s<br />
V s<br />
(from external PSS)<br />
B svs<br />
π<br />
Input 1<br />
Input 2<br />
Model supported by PSLF<br />
K s1<br />
1 + sT s8<br />
1 + sT s7 5 1 + sT s9<br />
⬚<br />
K s2<br />
1 + sT s11<br />
+<br />
7<br />
6<br />
8<br />
+<br />
ss s13<br />
1 + sT s14<br />
9<br />
K S3<br />
Vscs MIN<br />
Vscs MAX<br />
Vscs<br />
States:<br />
1 – LLVbus<br />
2 – Regulator1<br />
3 – Regulator2<br />
4 – Thyristor<br />
5 – Transducer1<br />
6 – LL1<br />
7 – Transducer2<br />
8 - LL2<br />
9 – WO13
Machine Model VWSCC<br />
Static Var Device Model VWSCC<br />
B MAX<br />
V bus<br />
+<br />
⬚<br />
-<br />
X C<br />
Ve MAX<br />
1 + sT C<br />
A + sT<br />
-<br />
s2<br />
1 + sT s4<br />
Fast<br />
1<br />
⬚ ⬚<br />
e -sTd1<br />
K<br />
1 + sT s1 +<br />
SVS Over<br />
B + sT s3<br />
1 + sT s5 1 + sT<br />
Ride<br />
s6<br />
+ + Ve MIN<br />
1 V<br />
2 B MIN<br />
ref V<br />
3<br />
scs<br />
4<br />
B svs<br />
(from Stabilizer)<br />
π<br />
States:<br />
1 – LLVBus<br />
2 – Regulator1<br />
3 – Regulator2<br />
4 – Thyristor<br />
Model supported by PSLF
Machine Model WT1G<br />
Generator Model for Generic Type-1 Wind Turbines WT1G<br />
+<br />
ψ dr2<br />
⬚<br />
-<br />
ω o SLIP<br />
ω o ∙ R r2<br />
L ll2<br />
+<br />
-<br />
⬚<br />
Ψ qr2<br />
1<br />
L ll2<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
ψ dr1<br />
ω o<br />
SLIP<br />
ω o ∙ R<br />
+ r1<br />
⬚<br />
⬚<br />
L ll1<br />
+<br />
-<br />
2<br />
ψ mm<br />
+ ψ<br />
2<br />
mm<br />
-<br />
S e<br />
Ψ qr1<br />
1<br />
L ll1<br />
+<br />
⬚<br />
+<br />
K sat = 1 + Se(ψ m<br />
)<br />
L'' m sat<br />
Ψ mq<br />
′′<br />
L m sss =<br />
K sss<br />
+<br />
⬚<br />
-<br />
-E'' d = ψ' q<br />
L'' m sat<br />
1<br />
⁄ L m + 1⁄ L ll1 + 1⁄<br />
L ll2<br />
i qs<br />
Ψ qr1<br />
Model supported by PSLF<br />
ω o<br />
SLIP<br />
+<br />
ω o ∙ R<br />
+ r1<br />
⬚<br />
⬚<br />
L ll1 +<br />
-<br />
Ψ qr2<br />
ω o<br />
SLIP<br />
+<br />
ω o ∙ R<br />
+ r2<br />
⬚<br />
⬚<br />
L ll2<br />
+<br />
-<br />
Ψ m<br />
Ψ dr1<br />
Ψ dr2<br />
1<br />
L ll1<br />
1<br />
L ll2<br />
+<br />
⬚<br />
+<br />
L'' m sat<br />
Ψ md<br />
⬚<br />
+<br />
-<br />
L'' m sat<br />
E'' q<br />
= ψ' d<br />
L m = L s − L l<br />
′<br />
L m = 1/(1/L m + 1/L ll1 ) = L ′ − L l<br />
′′<br />
L m = 1/(1/L m + 1/L ll1 + 1/L ll2 )<br />
= L ′′ − L l<br />
T ′ ′<br />
o = L ll1 ∙ L m /(ω o ∙ R r1 ∙ L m )<br />
= (L ll1 + L m )/(ω o ∙ R r1 )<br />
T ′′ ′<br />
o = L ll2 ∙ L m /(ω o ∙ R r2 ∙ L ′′ m )<br />
′<br />
= (L ll2 + L m )/(ω o ∙ R r2 )<br />
i ds
Machine Model WT1G1<br />
Direct Connected Type 1 Generator Model WT1G1<br />
Tpo T' – Open circuit transient rotor time constant<br />
Tppo T'' – Open circuit sub-transient rotor time constant in sec.<br />
Ls Synchronous reactance<br />
Lp L' – Transient Reactance<br />
Lpp L'' – Sub-transient Reactance<br />
Ll Stator leakage reactance (p.u. > 0)<br />
E1 Field voltage value E1<br />
SE1 Saturation value at E1<br />
E2 Field voltage value E2<br />
SE2 Saturation value at E2<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
Model supported by PSSE
Machine Model WT2G<br />
Model WT2G<br />
Ls Synchronous reactance, (p.u. > 0)<br />
Lp Transient reactance, (p.u. > 0)<br />
Ll Stator leakage reactance, (p.u. > 0)<br />
Ra<br />
Stator resistance in p.u.<br />
Tpo Transient rotor time constant in sec.<br />
S(1.0) Saturation factor at 1.0 p.u. flux<br />
S(1.2) Saturation factor at 1.2 p.u. flux<br />
spdrot Initial electrical rotor speed, p.u. of system frequency<br />
Accel Factor Acceleration factor<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
Model supported by PSLF
Machine Model WT2G1<br />
Induction Generator with Controlled External Rotor Resistor Type 2<br />
Model WT2G1<br />
Xa<br />
Xm<br />
X1<br />
R_Rot_Mach<br />
R_Rot_Max<br />
E1<br />
SE1<br />
E2<br />
SE2<br />
Power_Ref1 to Power_Ref_5<br />
Slip_1 to Slip_5<br />
Stator reactance<br />
Magnetizing reactance<br />
Rotor reactance<br />
Rotor resistance<br />
Sum of R_Rot_Mach and total external resistance<br />
Field voltage value E1<br />
Saturation value at E1<br />
Field voltage value E2<br />
Saturation value at E2<br />
Coordinate pairs of the power-slip curve<br />
Power-Slip<br />
States:<br />
1 – Epr<br />
2 – Epi<br />
3 – Ekr<br />
4 – Eki<br />
Model supported by PSSE
Machine Model WT3G<br />
Generator/converter Model for Type-3 (Double-Fed) Wind Turbines WT3G<br />
E'' q cmd<br />
1<br />
E'' q<br />
−1<br />
I Yinj<br />
I̅ssss<br />
(efd)<br />
1 + 0.02s<br />
X′′<br />
From<br />
exwtge<br />
1<br />
T<br />
I P cmd<br />
(ladifd)<br />
1<br />
1 + 0.02s<br />
I P<br />
Low Voltage<br />
Active Current<br />
Regulation<br />
I Xinj<br />
From<br />
exwtge<br />
2<br />
3<br />
V term<br />
∠ θ<br />
jX''<br />
States:<br />
1 – E q<br />
2 – I p<br />
3 – Vmeas<br />
Model supported by PSLF
Machine Model WT3G1<br />
Double-Fed Induction Generator (Type 3) Model WT3G1<br />
E q cmd<br />
1<br />
E q<br />
−1<br />
I Yinj<br />
I̅ssss<br />
(efd)<br />
1 + 0.02s<br />
X ee<br />
States:<br />
1 – Eq<br />
2 – Iq<br />
3 – Vmeas<br />
4 – PLL1<br />
5 – Delta<br />
From<br />
Converter<br />
Control<br />
I P cmd<br />
1<br />
1<br />
1 + 0.02s<br />
2<br />
P llmax<br />
I P<br />
I Xinj<br />
T<br />
V term<br />
∠ θ<br />
K iiii<br />
s<br />
4<br />
jX''<br />
-P llmax<br />
V tttt<br />
3<br />
T -1<br />
V Y<br />
K ppp<br />
ω o<br />
+<br />
+<br />
⬚<br />
-P llmax<br />
P llma<br />
ω o<br />
s<br />
5<br />
δ<br />
V X<br />
Notes: 1. V tttt and I̅ssss are complex values on network reference frame.<br />
2. In steady-state, V Y<br />
= 0, V X<br />
= V term<br />
, and δ = θ.<br />
3. X eq<br />
= Imaginary (ZSOURCE)<br />
Model supported by PSEE
Machine Model WT3G2<br />
Double-Fed Induction Generator (Type 3) Model WT3G2<br />
WEPCMD<br />
1<br />
1 + sT iiiii<br />
1<br />
−1<br />
X ee<br />
High Voltage<br />
Reactive Current<br />
Logic<br />
T<br />
I̅ssss<br />
WIPCMD<br />
+<br />
-<br />
⬚<br />
R ip_LVPL<br />
1<br />
sT iiiii<br />
2<br />
LVPL<br />
Low Voltage<br />
Reactive Current<br />
Logic<br />
LVPL<br />
1<br />
V T<br />
G LVPL<br />
LVPL<br />
V LVPL1<br />
V LVPL2 V<br />
1 + sT _LLLL<br />
P LLMAX<br />
3<br />
V T<br />
T -1<br />
V Y<br />
K PPP<br />
ω o<br />
K IIII<br />
s<br />
P LLMIN<br />
+<br />
4<br />
+<br />
⬚<br />
P LLMAX<br />
ω o<br />
s<br />
5<br />
States:<br />
1 – Eq<br />
2 – Iq<br />
3 – Vmeas<br />
4 – PLL1<br />
5 – Delta<br />
P LLMIN<br />
V X<br />
Model supported by PSEE<br />
Angle of V T<br />
If K PLL<br />
= 0 and K IPLL<br />
= 0
Machine Model WT4G1<br />
States:<br />
1 – Eq<br />
2 – Iq<br />
3 – Vmeas<br />
WEPCMD<br />
Wind Generator Model with Power Converter WT4G1<br />
1<br />
1 + sT eeeee<br />
1<br />
High Voltage<br />
Reactive Current<br />
Logic<br />
I̅ssss<br />
R ip_LVPL<br />
WIPCMD +<br />
1<br />
⬚<br />
-<br />
sT iiiii<br />
2<br />
LVPL<br />
Low Voltage<br />
Reactive Current<br />
Logic<br />
LVPL<br />
LVPL<br />
G LVPL<br />
V LVPL1<br />
V LVPL2 V<br />
1<br />
1 + sT _LLLL<br />
V T<br />
3<br />
Model supported by PSEE
Machine Model WT4G<br />
Model WT4G<br />
Tiqcmd<br />
Tipcmd<br />
VLVPL1<br />
VLVPL2<br />
GLVLP<br />
VHVRCR<br />
CurHVRCR<br />
RIP_LVPL<br />
T_LVLP<br />
Q command time constant<br />
P command time constant<br />
Low voltage regulation breakpoints<br />
Low voltage regulation breakpoints<br />
Low voltage regulation breakpoints<br />
High Voltage limit in p.u.<br />
High voltage reactive current limit<br />
Maximum Ip rate in p.u.<br />
Voltage sensor time constant<br />
States:<br />
1 – Eq<br />
2 – Ip<br />
3 – Vmeas<br />
Model supported by PSLF
Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG<br />
Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG<br />
Stabilizer Models<br />
⎧<br />
⎪<br />
⎪<br />
⎪<br />
⎪<br />
CHOICE OF<br />
INPUT SIGNALS⎨<br />
⎪<br />
⎪<br />
⎪<br />
⎪<br />
⎪<br />
⎩<br />
V =V<br />
− V<br />
T TO T<br />
e ts<br />
SHAFT SLIP,<br />
∆ FREQ. OR<br />
ACCEL. POWER<br />
K<br />
QV<br />
1+sT<br />
K QS<br />
K<br />
QS<br />
1+sT<br />
QV<br />
QS<br />
+<br />
2<br />
−<br />
+<br />
Σ<br />
1<br />
sT<br />
Q<br />
1+sT<br />
Q<br />
3 4 5 6<br />
1+sT<br />
1+sT<br />
'<br />
Q1<br />
Q1<br />
1+sT<br />
1+sT<br />
'<br />
Q2<br />
Q2<br />
∆V T<br />
1+sT<br />
1+sT<br />
'<br />
Q3<br />
Q3<br />
States<br />
1 - K<br />
2 - K<br />
3 - T<br />
4 - T<br />
5 - T<br />
6 - T<br />
QS<br />
Q<br />
QV<br />
Q1<br />
Q2<br />
Q3<br />
If V ≤ 0.0, then V =V<br />
'<br />
CUTOFF S S<br />
If V >0.0, then<br />
CUTOFF<br />
V =V if ∆V ≤V<br />
'<br />
S S T CUTOFF<br />
V =0.0 if ∆V >V<br />
S T CUTOFF<br />
∆V =V<br />
−V<br />
T TO T<br />
Model in the public domain, available from BPA<br />
V SMAX<br />
V SMIN<br />
'<br />
V S<br />
ZERO<br />
V ST
Stabilizer BPA SH, BPA SHPLUS, and BPA SI<br />
Stabilizer BPA SH, BPA SHPLUS, and BPA SI<br />
Stabilizer Models<br />
No block diagrams have been created
Stabilizer IEE2ST<br />
Stabilizer IEE2ST<br />
IEEE Stabilizing Model with Dual-Input Signals<br />
Input Signal #1<br />
K1<br />
1+sT<br />
1<br />
1<br />
+<br />
Σ<br />
+<br />
sT3<br />
1+sT<br />
4<br />
3 4 5<br />
1+sT<br />
1+sT<br />
5<br />
6<br />
1+sT<br />
1+sT<br />
7<br />
8<br />
Input Signal #2<br />
K2<br />
1+sT<br />
2<br />
2<br />
Output Limiter<br />
1+sT<br />
1+sT<br />
9<br />
10<br />
6<br />
L SMAX<br />
V SS<br />
L SMIN<br />
V = V if (V > V > V )<br />
S SS CU CT CL<br />
V = 0 if (V < V )<br />
S CT CL<br />
V = 0 if (V > V )<br />
S CT CU<br />
V ST<br />
States<br />
1 - Transducer1<br />
2 - Transducer2<br />
3 - Washout<br />
4 - LL1<br />
5 - LL2<br />
6 - Unlimited Signal<br />
Model supported by PSSE
Stabilizer IEEEST<br />
Stabilizer IEEEST<br />
IEEE Stabilizing Model<br />
Input Signal<br />
Filter<br />
1+A s+A s<br />
(1+A s+A s )(1+A s+A s )<br />
2<br />
5 6<br />
2 2<br />
1 2 3 4<br />
1+sT1<br />
1+sT<br />
2<br />
1+sT<br />
1+sT<br />
3<br />
4<br />
1 2 3 4<br />
5 6<br />
sT<br />
5<br />
KS<br />
1+sT<br />
6<br />
LSMIN<br />
L SMAX<br />
Output Limiter<br />
7<br />
V SS<br />
V = V if (V > V > V )<br />
S SS CU CT CL<br />
V = 0 if (V < V )<br />
S CT CL<br />
V = 0 if (V > V )<br />
S CT CU<br />
V ST<br />
States<br />
1 - Filter 1<br />
2 - Filter 2<br />
3 - Filter 3<br />
4 - Filter Out<br />
5 - LL1<br />
6 - LL2<br />
7 - Unlimited Signal<br />
Model supported by PSLF with time delay that is not implemented in Simulator<br />
Model supported by PSSE
Stabilizer PFQRG<br />
Stabilizer PFQRG<br />
Power-Sensitive Stabilizing Unit<br />
Reactive<br />
Power<br />
J=1<br />
J=0<br />
Power<br />
Factor<br />
+<br />
+<br />
Σ<br />
Reference Signal,<br />
Reactive power or<br />
Power Factor<br />
K<br />
P<br />
K<br />
+<br />
s<br />
I<br />
1<br />
MAX<br />
-MAX<br />
To Voltage<br />
Regulator<br />
V ST<br />
Supplementary<br />
Signal<br />
States<br />
1 - PI<br />
Model supported by PSLF
Stabilizer PSS1A<br />
Stabilizer PSS1A<br />
Single-Input Stabilizer Model<br />
Input Signal<br />
Filter<br />
1<br />
sT<br />
1<br />
1 + sT 6 1 + A 1 s+A 2 s 2<br />
5<br />
KS<br />
1+sT<br />
6<br />
Output Limiter<br />
1+sT1<br />
1+sT<br />
2<br />
1+sT<br />
1+sT<br />
3<br />
4<br />
L SMIN<br />
L SMAX<br />
Vllout<br />
If (Vcu and (Vct > Vcu))<br />
V ST = 0.0<br />
If (Vcl and (Vct < Vcu))<br />
V ST = 0.0<br />
Else<br />
V ST = Vllout<br />
V ST<br />
Model supported by PSLF with time delay that is not implemented in Simulator<br />
Model supported by PSSE
Stabilizer PSS2A<br />
Stabilizer PSS2A<br />
IEEE Dual-Input Stabilizer Model<br />
Input Signal #1<br />
sT<br />
1 2 3<br />
sT<br />
W1<br />
W2<br />
1+sT 1+sT<br />
W1<br />
W2 1+sT6<br />
1<br />
+<br />
Σ<br />
+<br />
⎡ 1+sT<br />
⎢<br />
⎣(1+sT )<br />
8<br />
M<br />
9<br />
9 − 18<br />
⎤<br />
⎥<br />
⎦<br />
N<br />
+<br />
Σ<br />
−<br />
K S1<br />
1+sT1<br />
1+sT<br />
2<br />
7 8<br />
1+sT<br />
1+sT<br />
3<br />
4<br />
Input Signal #2<br />
sT<br />
1+sT<br />
W3<br />
W3<br />
4 5 6<br />
sT<br />
1+sT<br />
W4<br />
W4<br />
KS2<br />
1+sT<br />
7<br />
K S3<br />
K S4<br />
A+sT<br />
1+sT<br />
B<br />
A<br />
19<br />
V STMAX<br />
V ST<br />
V STMIN<br />
States<br />
1 - WOTW1 11 - RampFilter3<br />
2 - WOTW2 12 - RampFilter4<br />
3 - Transducer1 13 - RampFilter5<br />
4 - WOTW3 14 - RampFilter6<br />
5 - WOTW4 15 - RampFilter7<br />
6 - Transducer2 16 - RampFilter8<br />
7 - LL1 17 - RampFilter9<br />
8 - LL2 18 - RampFilter10<br />
9 - RampFilter1 19 - LLGEOnly<br />
10 - RampFilter2<br />
Model supported by PSLF<br />
Model supported by PSSE without T ,T lead/lag block and with K = 1<br />
A B S4
Stabilizer PSS2B<br />
Stabilizer PSS2B<br />
IEEE Dual-Input Stabilizer Model<br />
V S1<br />
V S1MAX<br />
sT<br />
1 2 3<br />
sT<br />
W1<br />
W2<br />
1+sTW1<br />
1+sT 1+sT<br />
W2<br />
6<br />
1<br />
+<br />
Σ<br />
+<br />
⎡ 1+sT<br />
⎢<br />
⎣(1+sT )<br />
8<br />
M<br />
9<br />
⎤<br />
⎥<br />
⎦<br />
N<br />
+<br />
Σ<br />
−<br />
K S1<br />
1+sT1<br />
1+sT<br />
2<br />
7 8<br />
1+sT<br />
1+sT<br />
3<br />
4<br />
1+sT<br />
1+sT<br />
10<br />
11<br />
20<br />
V S1MIN<br />
9 − 18<br />
V S2<br />
V S2MIN<br />
V S2MAX<br />
sT<br />
1+sT<br />
W3<br />
W3<br />
4 5 6<br />
sT<br />
1+sT<br />
W4<br />
W4<br />
KS2<br />
1+sT<br />
7<br />
K S3<br />
K S4<br />
A+sT<br />
1+sT<br />
B<br />
A<br />
19<br />
V STMAX<br />
V ST<br />
V STMIN<br />
States<br />
1 - WOTW1 11 - RampFilter3<br />
2 - WOTW2 12 - RampFilter4<br />
3 - Transducer1 13 - RampFilter5<br />
4 - WOTW3 14 - RampFilter6<br />
5 - WOTW4 15 - RampFilter7<br />
6 - Transducer2 16 - RampFilter8<br />
7 - LL1 17 - RampFilter9<br />
8 - LL2 18 - RampFilter10<br />
9 - RampFilter1 19 - LLGEOnly<br />
10 - RampFilter2 20 - LL3<br />
Model supported by PSLF<br />
Model supported by PSSE without T ,T lead/lag block and with K = 1<br />
A B S4
Stabilizer PSSSB<br />
Stabilizer PSSSB<br />
IEEE PSS2A Dual-Input Stabilizer Plus Voltage Boost Signal<br />
Transient Stabilizer and Vcutoff<br />
Input 1<br />
Input 2<br />
States<br />
sTW1<br />
sT<br />
1<br />
W2<br />
1+sT 1+sT 1+sT6<br />
sT<br />
1+sT<br />
W1<br />
W3<br />
W3<br />
1 2 3<br />
W2<br />
4 5 6<br />
sT<br />
1+sT<br />
W4<br />
W4<br />
1 - WOTW1 11 - RampFilter3<br />
2 - WOTW2 12 - RampFilter4<br />
3 - Transducer1 13 - RampFilter5<br />
4 - WOTW3 14 - RampFilter6<br />
5 - WOTW4 15 - RampFilter7<br />
KS2<br />
1+sT<br />
6 - Transducer2 16 - RampFilter8<br />
7 - LL1 17 - RampFilter9<br />
8 - LL2 18 - RampFilter10<br />
9 - RampFilter1 19 - TransducerTEB<br />
10 - RampFilter2 20 - WOTEB<br />
Model supported by PSLF<br />
7<br />
+<br />
Σ<br />
+<br />
K S3<br />
⎡ 1+sT<br />
⎢<br />
⎣(1+sT )<br />
8<br />
M<br />
9<br />
9 − 18<br />
V K<br />
⎤<br />
⎥<br />
⎦<br />
N<br />
1<br />
+<br />
Sw1<br />
Σ<br />
−<br />
K S4<br />
0<br />
1+sT<br />
1<br />
KS1<br />
1+sT2<br />
1<br />
1+sT<br />
0<br />
d1<br />
19<br />
sTd2<br />
1+sT<br />
7 8<br />
d2<br />
1+sT<br />
1+sT<br />
3<br />
4<br />
V STMIN<br />
20<br />
V tl<br />
+<br />
+<br />
Σ<br />
V STMAX<br />
≤ 0<br />
ΔV<br />
T<br />
=VT0-VT<br />
ΔV<br />
T<br />
>Vcutoff<br />
0<br />
Vcutoff<br />
V ST
Stabilizer PTIST1<br />
Stabilizer PTIST1<br />
PTI Microprocessor-Based Stabilizer<br />
1<br />
Ms<br />
1+sT<br />
K(1+sT )(1+sT )<br />
(1+sT )(1 + sT )<br />
Δω +<br />
M<br />
1 3<br />
F<br />
Σ<br />
+<br />
P'<br />
+<br />
Σ<br />
−<br />
2 4<br />
Tap<br />
Selection<br />
Table<br />
−<br />
Σ<br />
+<br />
π<br />
V ST<br />
1<br />
1+sT<br />
P<br />
P<br />
e<br />
on machine MVA base<br />
E t<br />
Model supported by PSSE but not yet implemented in Simulator
Stabilizer PTIST3<br />
Stabilizer PTIST3<br />
PTI Microprocessor-Based Stabilizer<br />
Ms<br />
1+sT<br />
K(1+sT )(1+sT )<br />
(1+sT )(1 + sT )<br />
Δω 1 3<br />
F<br />
+<br />
Σ<br />
P' M<br />
+<br />
Σ<br />
+<br />
−<br />
2 4<br />
1+sT<br />
1+sT<br />
5<br />
6<br />
(A +A s+A s )(A +A s+A s )<br />
(B +B s+B s )(B +B s+B s )<br />
2 2<br />
0 1 2 3 4 5<br />
2 2<br />
0 1 2 3 4 5<br />
1<br />
1+sT<br />
P<br />
P<br />
e<br />
on machine MVA base<br />
Averaging<br />
Function<br />
Limit<br />
Function<br />
Switch = 0<br />
−DL<br />
DL<br />
AL<br />
Tap<br />
Selection<br />
Table<br />
1<br />
E t<br />
+<br />
−<br />
Σ π<br />
V ST<br />
Switch = 1<br />
−AL<br />
Model supported by PSSE but not yet implemented in Simulator
Stabilizer ST2CUT<br />
Stabilizer ST2CUT<br />
Stabilizing Model with Dual-Input Signals<br />
Input Signal #1<br />
K1<br />
1+sT<br />
1<br />
1<br />
+<br />
+<br />
Σ<br />
sT3<br />
1+sT<br />
4<br />
3 4 5 6<br />
1+sT<br />
1+sT<br />
5<br />
6<br />
1+sT<br />
1+sT<br />
7<br />
8<br />
1+sT<br />
1+sT<br />
9<br />
10<br />
Input Signal #2<br />
K2<br />
1+sT<br />
2<br />
2<br />
L SMIN<br />
L SMAX<br />
V SS<br />
Output Limiter<br />
V = V if (V +V >V >V +V )<br />
S SS CU TO T CL TO<br />
V = 0 if (V < V +V )<br />
S T TO CL<br />
V = 0 if (V > V +V )<br />
S CT TO CU<br />
V ST<br />
States<br />
1 - Transducer1<br />
2 - Transducer2<br />
3 - Washout<br />
4 - LL1<br />
5 - LL2<br />
6 - Unlimited Signal<br />
Model supported by PSSE<br />
V = initial terminal voltage<br />
TO<br />
V = terminal voltage<br />
T
Stabilizer STAB1<br />
Stabilizer STAB1<br />
Speed-Sensitive Stabilizing Model<br />
Speed (pu)<br />
Ks<br />
1+sT<br />
1+sT1<br />
1+sT<br />
3<br />
1+sT<br />
1+sT<br />
1 2 3<br />
2<br />
4<br />
H LIM<br />
V ST<br />
-H LIM<br />
States<br />
1 - Washout<br />
2 - Lead-lag 1<br />
3 - Lead-lag 2<br />
Model supported by PSSE
Stabilizer STAB2A<br />
Stabilizer STAB2A<br />
Power-Sensitive Stabilizing Unit<br />
P<br />
e<br />
on machine<br />
MVA base<br />
⎡K2sT<br />
⎤<br />
2<br />
− ⎢ ⎥<br />
⎣1+sT2<br />
⎦<br />
3<br />
K3<br />
1+sT<br />
K 4<br />
3<br />
4<br />
+<br />
+<br />
Σ<br />
⎡ K ⎤<br />
5<br />
⎢ ⎥<br />
⎣1+sT5<br />
⎦<br />
1 − 3<br />
5 − 6<br />
2<br />
H LIM<br />
-H LIM<br />
V ST<br />
States<br />
1 - Input State 1<br />
2 - Input State 2<br />
3 - Input State 3<br />
4 - T<br />
3<br />
5 - Output State 1<br />
6 - Output State 2<br />
Model supported by PSSE
Stabilizer STAB3<br />
Stabilizer STAB3<br />
Power-Sensitive Stabilizing Unit<br />
P<br />
ref<br />
P<br />
e<br />
on machine<br />
MVA base<br />
1<br />
1+sT<br />
t<br />
1<br />
−<br />
2 3<br />
1<br />
1+sT<br />
+ Σ X1<br />
-sK<br />
1+sT<br />
X<br />
X2<br />
V LIM<br />
V ST<br />
-V LIM<br />
States<br />
1 - Int T<br />
2 - Int T<br />
t<br />
X1<br />
3 - Unlimited Signal<br />
Model supported by PSSE
Stabilizer STAB4<br />
Stabilizer STAB4<br />
Power-Sensitive Stabilizer<br />
P<br />
e<br />
on machine<br />
MVA base<br />
1<br />
1+sT<br />
t<br />
1<br />
P<br />
ref<br />
−<br />
sK<br />
1+sT<br />
+ Σ XX2<br />
2 3 4 5 6<br />
1+sT<br />
1+sT<br />
a<br />
X1<br />
1+sT<br />
1+sT<br />
b<br />
c<br />
1<br />
1+sT<br />
d<br />
1<br />
1+sT<br />
e<br />
L1<br />
L2<br />
V ST<br />
States<br />
1 - Input<br />
2 - Reset<br />
3 - LL1<br />
4 - LL2<br />
5 - T<br />
d<br />
6 - Unlimited Signal<br />
Model supported by PSSE
Stabilizer STBSVC<br />
Stabilizer STBSVC<br />
WECC Supplementary Signal for Static var Compensator<br />
1 2<br />
Input Signal #1<br />
Input Signal #2<br />
KS1<br />
1+sT<br />
S7<br />
KS2<br />
1+sT<br />
S10<br />
1+sT<br />
1+sT<br />
+<br />
+<br />
3 4<br />
1+sT<br />
1+sT<br />
S8<br />
S9<br />
S11<br />
S12<br />
Σ<br />
sT<br />
1+sT<br />
S13<br />
K S3<br />
S14<br />
5<br />
K S3<br />
-V SCS<br />
V SCS<br />
V ST<br />
States<br />
1 - Transducer1<br />
2 - LL1<br />
3 - Transducer2<br />
4 - LL2<br />
5 - Washout<br />
Model supported by PSSE
Stabilizer WSCCST<br />
Stabilizer WSCCST<br />
WSCC Power System Stabilizer<br />
V T<br />
k<br />
+<br />
V T0<br />
Σ<br />
signal j<br />
−−−−−−<br />
speed 1<br />
accpw 2<br />
freq 3<br />
−<br />
f(U)<br />
K<br />
qv<br />
1+sT<br />
1<br />
1+sT<br />
1<br />
1+sT<br />
1<br />
qs<br />
qv<br />
2<br />
1<br />
sT2<br />
1+sT<br />
2<br />
+<br />
Σ<br />
+<br />
sT<br />
K qs<br />
K t<br />
3<br />
1+sT3<br />
1+sT4<br />
s<br />
+<br />
−<br />
Σ<br />
Σ<br />
+<br />
−<br />
+<br />
'<br />
V s<br />
U<br />
States<br />
1 - Transducer1<br />
2 - Transducer2<br />
3 - WashoutTq<br />
4 - LL1<br />
5 - LL2<br />
6 - LL3<br />
V SMAX<br />
0<br />
ΔV<br />
T<br />
=VT0-VT<br />
ΔV<br />
T<br />
>Vcutoff<br />
sT<br />
q<br />
1+sT<br />
q<br />
3 '<br />
'<br />
1+sT 4 1+sT 5 1+sT 6<br />
1+sT<br />
q1<br />
q1<br />
1+sT<br />
'<br />
q2<br />
q2<br />
1+sT<br />
q3<br />
q3<br />
V SLOW<br />
+<br />
+<br />
Σ<br />
≤ 0<br />
Vcutoff<br />
V S<br />
0<br />
Model supported by PSLF<br />
Sw1<br />
Blocks in gray have not been implemented in Simulator<br />
V K<br />
0<br />
1<br />
1<br />
1+sT<br />
d1<br />
sTd2<br />
1+sT<br />
d2<br />
V tl
Stabilizer WT12A1 and WT1P<br />
Stabilizer WT12A1 and WT1P<br />
Pseudo Governor Model for Type 1 and Type 2 Wind Turbines<br />
Speed<br />
K P<br />
P gen<br />
1<br />
1+sT<br />
PE<br />
1<br />
ω ref<br />
+<br />
−<br />
+<br />
Σ K droop<br />
−<br />
+<br />
Σ<br />
K I<br />
1<br />
s<br />
+<br />
+<br />
Σ<br />
2<br />
PI MIN<br />
PI MAX<br />
1<br />
1+sT<br />
1<br />
3 4<br />
1<br />
1+sT<br />
2<br />
P mech<br />
P ref<br />
States<br />
1 - P<br />
2 - K<br />
3 - T<br />
4 - P<br />
gen<br />
1<br />
I<br />
mech<br />
WT12A1 supported by PSSE with K<br />
I<br />
= T<br />
I<br />
WT1P supported by PSLF<br />
1
Stabilizer WT2P<br />
Stabilizer Model WT2P<br />
Tpe<br />
Kdroop<br />
Kp<br />
Ki<br />
Pimax<br />
Pimin<br />
T1<br />
T2<br />
Kw<br />
T'e – Time constant in sec.<br />
Droop gain<br />
PI proportional gain<br />
PI proportional gain<br />
Maximum pitch in deg.<br />
Minimum pitch in deg.<br />
Lead/lag time constant in sec.<br />
Lead/lag time constant in sec.<br />
Speed gain in p.u.<br />
Model supported by PSLF
Stabilizer WT3P and WT3P1<br />
Stabilizer WT3P and WT3P1<br />
Pitch Control Model for Type 3 Wind Generator<br />
Theta MAX<br />
Theta MAX<br />
ω<br />
ω ref<br />
P ORD<br />
2<br />
+ K +<br />
IP<br />
+<br />
Σ K<br />
PP<br />
+ s<br />
Σ Σ<br />
−<br />
+ −<br />
Theta MIN<br />
+<br />
3<br />
KIC<br />
K + s<br />
−<br />
Σ<br />
PC<br />
RTheta MAX<br />
1<br />
sT<br />
-RTheta MAX<br />
Theta MIN<br />
P<br />
1<br />
Pitch<br />
P set<br />
0<br />
States<br />
1 - Pitch<br />
2 - PitchControl<br />
3 - PitchComp<br />
WT3P supported by PSLF<br />
T =T , Theta =PI , Theta =PI , and RTheta = PI<br />
P PI MAX MAX MIN MIN MAX RATE<br />
WT3P1 supported by PSSE with no non-windup limits on pitch control
Switched Shunt Relay CAPRELAY<br />
Switched Shunt Relay CAPRELAY<br />
Rem Bus<br />
Tfilter<br />
tbClose<br />
tbOpen<br />
V1On<br />
T1On<br />
V2On<br />
T2On<br />
V1Off<br />
T1Off<br />
V2Off<br />
T2Off<br />
Remote Bus<br />
Voltage filter time constant in sec.<br />
Circuit breaker closing time for switching shunt ON in sec.<br />
Circuit breaker closing time for switching shunt OFF in sec.<br />
First voltage threshold for switching shunt capacitor ON in sec.<br />
First time delay for switching shunt capacitor ON in sec.<br />
Second voltage threshold for switching shunt capacitor ON in sec.<br />
Second time delay for switching shunt capacitor ON in sec.<br />
First voltage threshold for switching shunt capacitor OFF in sec.<br />
First time delay for switching shunt capacitor OFF in sec.<br />
Second voltage threshold for switching shunt capacitor OFF in sec.<br />
Second time delay for switching shunt capacitor OFF in sec.<br />
Model supported by PSLF
Exciter WT4E<br />
Exciter WT4E<br />
Electrical Control for Full Converter Wind-turbine generators (FC WTG)<br />
V C<br />
1<br />
1+ sTRV<br />
V RFQ<br />
+<br />
5 +<br />
− 1<br />
4<br />
∑<br />
K IV<br />
s<br />
KPV<br />
1+ sT<br />
V<br />
∑<br />
+<br />
3<br />
Q MIN<br />
Q MAX<br />
1+ sTFV<br />
6<br />
States:<br />
1 – Vref 6 - Qord<br />
2 - IqCMD 7 - Pmeas<br />
3 – Kpv<br />
4 – VregMeas<br />
5 – Kiv<br />
P FAREF<br />
P elec<br />
1<br />
1+ sTP<br />
tan<br />
7<br />
π<br />
Q REF<br />
0<br />
1<br />
pfaflg<br />
0<br />
1<br />
Q MAX<br />
+<br />
Q elec<br />
−<br />
∑<br />
V MAXCL<br />
K QI<br />
s<br />
1<br />
+<br />
−<br />
∑<br />
I QMAX<br />
K VI<br />
s<br />
2<br />
I QCMD<br />
varflg<br />
Q MIN<br />
V MINCL<br />
V TERM<br />
I QMIN<br />
pqflag<br />
Converter Current Limit<br />
+<br />
P ORD<br />
÷<br />
I PMAX<br />
I PCMD<br />
V TERM<br />
Model supported by PSSE
Exciter ESST5B and ST5B<br />
Exciter ESST5B and ST5B<br />
IEEE (2005) Type ST5B Excitation System<br />
V rmax /K r<br />
V rmax<br />
/K r<br />
7 8<br />
V c<br />
V rmin<br />
/K r<br />
V rmin<br />
/K r<br />
V ref<br />
+<br />
2<br />
_<br />
V oel<br />
HV<br />
Gate<br />
LV<br />
Gate<br />
+<br />
+<br />
V rmax<br />
/K r<br />
3<br />
V rmax<br />
/K r<br />
0<br />
4<br />
+1<br />
-1<br />
V rmax<br />
V r<br />
+<br />
_<br />
V t V rmax<br />
E fd<br />
1<br />
V uel<br />
V s<br />
V rmin<br />
/K r<br />
V rmin<br />
/K r<br />
V rmin<br />
V t V rmin<br />
V rmax<br />
/K r<br />
V rmax<br />
/K r<br />
I fd<br />
States:<br />
1 – Efd<br />
2 – Sensed Vt<br />
3 – LL1<br />
4 – LL2<br />
5 – LLU1<br />
6 – LLU2<br />
7 – LLO1<br />
8 – LLO2<br />
V rmin<br />
/K r<br />
5 6<br />
V rmin<br />
/K r<br />
Model supported by PSLF and PSSE
Exciter ESST6B<br />
Exciter ESST6B<br />
IEEE 421.5 2005 ST6B Excitation System Model<br />
I FD<br />
V C<br />
1<br />
1+ sT R<br />
2<br />
I LR<br />
K CL<br />
+<br />
−<br />
Σ<br />
K LR<br />
VOEL<br />
(OEL=1)<br />
Alternate OEL Inputs<br />
VOEL<br />
(OEL=2)<br />
V AMAX<br />
K FF<br />
V RMIN<br />
1<br />
0<br />
V T<br />
V RMULT<br />
−<br />
−<br />
+<br />
Σ<br />
V UEL<br />
HV<br />
Gate<br />
+<br />
−<br />
+<br />
Σ<br />
K<br />
PA<br />
V AMIN<br />
+ KIA<br />
sK<br />
s<br />
+ 1 + sT<br />
DA<br />
DA<br />
3 4<br />
V A<br />
+<br />
−<br />
Σ<br />
KM<br />
+<br />
+<br />
Σ<br />
V RMAX<br />
V RMIN<br />
LV<br />
Gate<br />
V R<br />
V B<br />
π<br />
1<br />
1+ sTS<br />
E FD<br />
1<br />
V REF<br />
V S<br />
States<br />
1 - E<br />
FD<br />
2 - Sensed V<br />
3 - PID1<br />
4 - PID2<br />
5 - V<br />
G<br />
t<br />
ESST6B is the same as model ST6B<br />
ESST6B is a PSLF model and ST6B is a PSSE model<br />
V G<br />
5<br />
sKG<br />
1+ sT<br />
G
Exciter ESST7B<br />
Exciter ESST7B<br />
IEEE 421.5 2005 ST7B Excitation System Model<br />
V DROOP<br />
V<br />
OEL<br />
(OEL=1)<br />
Alternate<br />
OEL Inputs<br />
VOEL<br />
(OEL=2)<br />
V C<br />
1<br />
1+ sT R<br />
1+<br />
sT<br />
1+<br />
sT<br />
G<br />
2 3<br />
F<br />
V S<br />
V SCL<br />
+<br />
+<br />
+<br />
Σ<br />
+<br />
+<br />
+<br />
Σ<br />
LV<br />
Gate<br />
HV<br />
Gate<br />
V MIN<br />
V MAX<br />
V REF_FB<br />
Σ<br />
Σ<br />
K PA<br />
Alternate UEL Inputs<br />
V REF<br />
VUEL<br />
(UEL=1)<br />
VUEL<br />
(UEL=2)<br />
VOEL<br />
(OEL=3)<br />
VUEL<br />
(UEL=3)<br />
VV<br />
T<br />
RMAX<br />
States:<br />
1 – EField<br />
2 – VTerminalSensed<br />
3 – InputLL<br />
4 – LL2<br />
5 – Feedback<br />
VV<br />
T<br />
RMIN<br />
+<br />
Σ<br />
−<br />
HV<br />
Gate<br />
Σ<br />
−<br />
+<br />
LV<br />
Gate<br />
VV<br />
T<br />
RMAX<br />
K L<br />
1+<br />
sT<br />
1+<br />
sT<br />
C<br />
B<br />
4<br />
+<br />
+<br />
Σ<br />
LV<br />
Gate<br />
5<br />
sKIA<br />
1+ sT<br />
IA<br />
HV<br />
Gate<br />
VV<br />
T<br />
RMIN<br />
1<br />
1+ sTS<br />
E FD<br />
1<br />
ESST7B is the same as model ST7B<br />
ESST7B is a PSLF model and ST7B is a PSSE model<br />
K H
Exciter BBSEX1<br />
Exciter BBSEX1<br />
Brown Boveri Static Exciter<br />
V ref<br />
E c<br />
V<br />
+<br />
rmax<br />
_ +<br />
+<br />
V t<br />
EFD max<br />
E fd<br />
2<br />
+<br />
1<br />
+<br />
V rmin<br />
+<br />
V t<br />
EFD min<br />
3<br />
0 Switch = 0<br />
States:<br />
1 – VLL34<br />
2 – Sensed Vt<br />
3 – Feedback<br />
V S<br />
Model supported by PSSE
Exciter IVOEX<br />
Exciter IVOEX<br />
IVO Excitation Model<br />
V ref<br />
E c<br />
2<br />
_<br />
+<br />
+<br />
MIN 1<br />
MAX 1<br />
1<br />
MIN 3<br />
MAX 3<br />
3<br />
4<br />
MIN 5<br />
MAX 5<br />
E fd<br />
V S<br />
States:<br />
1 – VLL12<br />
2 – Sensed Vt<br />
3 – VLL34<br />
4 – VLL56<br />
Model supported by PSSE
Exciter EXIVO<br />
Exciter EXIVO<br />
IVO Excitation Model<br />
V ref<br />
V comp<br />
2<br />
_<br />
+<br />
+<br />
MIN 1<br />
MAX 1<br />
1<br />
MIN 3<br />
MAX 3<br />
3<br />
4<br />
MIN 5<br />
MAX 5<br />
E fd<br />
V S<br />
States:<br />
1 – VLL12<br />
2 – Sensed Vt<br />
3 – VLL34<br />
4 – VLL56<br />
Model supported by PSLF
Generator Other Model LHFRT<br />
Low/High Frequency Ride through Generator Protection<br />
Fref<br />
dftrp1 to dftrp10<br />
Frequency ref. in Hz<br />
Delta Frequency Trip Level in p.u.<br />
Model supported by PSLF
Generator Other Model LHVRT<br />
Low/High Voltage Ride through Generator Protection<br />
Vref<br />
dvtrp1 to dftrp10<br />
Voltage ref. in p.u.<br />
Delta Voltage Trip Level in p.u.<br />
Model supported by PSLF
Governor HYPID<br />
Governor HYPID<br />
Hydro Turbine and Governor<br />
|ds2/dt| 0<br />
1 + sT eeee 2<br />
b<br />
T elec<br />
< 0<br />
R<br />
1<br />
1 + sT bbbbb<br />
6<br />
g min<br />
speed<br />
π<br />
D turb<br />
g<br />
÷<br />
π<br />
_<br />
⬚<br />
+<br />
1<br />
sT w<br />
4<br />
+<br />
⬚<br />
_<br />
π<br />
At<br />
_<br />
+<br />
⬚<br />
P mech<br />
Pv = f(g,b)<br />
hdam<br />
qnl<br />
States:<br />
1 – Ki<br />
2 – RPelec<br />
3 – Gate<br />
4 – Turbine Flow<br />
5 – Derivative<br />
6 - Blade<br />
+<br />
Model supported by PSLF
Governor WT4T<br />
Governor WT4T<br />
Simplified Type-4 (Full Converter) Wind Turbine<br />
P ref<br />
P ref<br />
dP max<br />
P elec<br />
1<br />
_<br />
+<br />
P iin<br />
1 s 2<br />
_<br />
K ii<br />
⬚<br />
K<br />
1 + sT pp+<br />
PP<br />
P iou<br />
_<br />
+<br />
⬚<br />
P ord<br />
dP min<br />
3<br />
sK f<br />
1 + sT f<br />
States:<br />
1 – Pelec<br />
2 – PIOut<br />
3 – Feedback<br />
Model supported by PSSE
Stabilizer PSSSH<br />
Stabilizer PSSSH<br />
Model for Siemens “H infinity” Power System Stabilizer with Generator Electrical<br />
Power Input<br />
V smax<br />
P e<br />
1<br />
1 + sT d<br />
⬚<br />
1<br />
K 0<br />
+<br />
+<br />
⬚<br />
+<br />
+<br />
⬚<br />
K 1 K 2 K 3<br />
K 4<br />
+<br />
+<br />
⬚<br />
+<br />
+<br />
⬚<br />
K<br />
V smin<br />
V s<br />
_<br />
+<br />
_<br />
1<br />
sT 1<br />
⬚<br />
1<br />
sT 2<br />
2 3 4 5<br />
+<br />
+<br />
+<br />
+<br />
⬚<br />
+<br />
1<br />
1<br />
sT 3 sT 4<br />
⬚<br />
+<br />
States:<br />
1 – Pe<br />
2 – Int1<br />
3 – Int2<br />
4 – Int3<br />
5 – Int4<br />
Model supported by PSLF
Stabilizer IVOST<br />
Stabilizer IVOST<br />
IVO Stabilizer Model<br />
MAX 3<br />
MAX 5<br />
P elec<br />
K 1<br />
A 1 + ss 1<br />
A 2 + sT 2<br />
MAX 1<br />
A 3 + ss 3<br />
A 5 + ss 5<br />
K 3 K 5<br />
1 A 4 + sT 4 2 A 6 + sT 6<br />
MIN 1<br />
MIN 3<br />
3<br />
MIN 5<br />
V OTHSG<br />
States:<br />
1 – VLL12<br />
2 – VLL34<br />
3 – VLL56<br />
Model supported by PSSE
Stabilizer PSS3B<br />
Stabilizer PSS3B<br />
IEEE Dual-Input Stabilizer model<br />
V s1<br />
K s1<br />
ss w1<br />
1 + sT 1 1 1 + sT w1<br />
3<br />
V STMAX<br />
+<br />
+ ss w3 1 + sA 1 + s 2 A 2 1 + sA 5 + s 2 A 6<br />
V S<br />
⬚<br />
1 + sT w3<br />
5<br />
1 + sA 3 + s 2 A 4<br />
1 + sA 7 + s 2 A 8<br />
+<br />
6 7 8 9<br />
V STMIN<br />
V s2<br />
K s2<br />
ss w2<br />
1 + sT 2 2 1 + sT w2<br />
4<br />
States:<br />
1 – Input 1<br />
2 – Input 2<br />
3 – Washout 1<br />
4 – Washout 2<br />
5 – Washout 3<br />
6 – Filter 1 Internal<br />
7 – Filter 1 Output<br />
8 – Filter 2 Internal<br />
9 – Filter 2 Output<br />
Model supported by PSLF