Compact / CANopen /Drive Controller / ATV-IMC + Optimized Hoisting
Compact / CANopen /Drive Controller / ATV-IMC + Optimized Hoisting
Compact / CANopen /Drive Controller / ATV-IMC + Optimized Hoisting

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
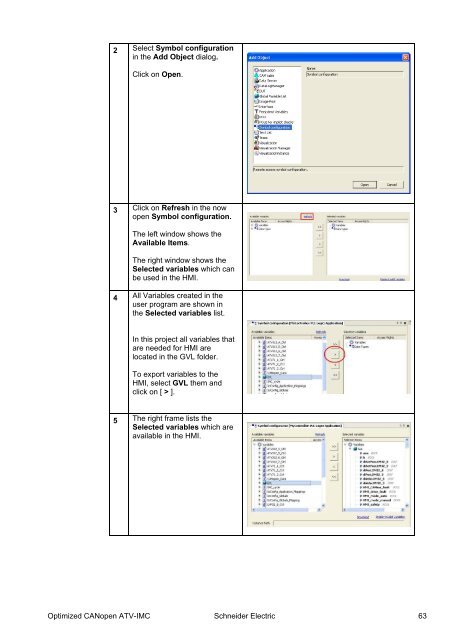
2 Select Symbol configuration<br />
in the Add Object dialog.<br />
Click on Open.<br />
3 Click on Refresh in the now<br />
open Symbol configuration.<br />
The left window shows the<br />
Available Items.<br />
The right window shows the<br />
Selected variables which can<br />
be used in the HMI.<br />
4 All Variables created in the<br />
user program are shown in<br />
the Selected variables list.<br />
In this project all variables that<br />
are needed for HMI are<br />
located in the GVL folder.<br />
To export variables to the<br />
HMI, select GVL them and<br />
click on [ > ].<br />
5 The right frame lists the<br />
Selected variables which are<br />
available in the HMI.<br />
<strong>Optimized</strong> <strong>CANopen</strong> <strong>ATV</strong>-<strong>IMC</strong> Schneider Electric 63