Stepper drives Servostep drives Controllers 2012
Stepper drives Servostep drives Controllers 2012
Stepper drives Servostep drives Controllers 2012

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
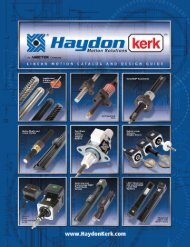
GWC<br />
Motion Controller<br />
<br />
Profibus / Devicenet / Modbus<br />
RS232/485 Modbus<br />
VT506T<br />
Programmable<br />
Touch Screen<br />
HMI<br />
Control modalities:<br />
Thanks to the T.R.I.P.O.S.GW programming<br />
environment it’s possible<br />
to personalize the machine cycle<br />
and to manage all <strong>drives</strong> and local<br />
resources, reducing and simplifying<br />
the work load of the master PLC if<br />
present.<br />
TR.I.P.O.S.GW<br />
GWC unit programming<br />
software environment<br />
High<br />
Speed<br />
Input<br />
and<br />
Output<br />
SE46<br />
Master encoder<br />
CANBus Canopen<br />
SM2A<br />
Integrated servomotors<br />
with Motion Module<br />
and encoder<br />
SD<br />
<strong>Stepper</strong> <strong>drives</strong> with Motion<br />
Module and Closed Loop<br />
(optional)<br />
MT34FN<br />
Motors with<br />
encoder<br />
SW<br />
Drives with<br />
Advanced Power<br />
Motion Module<br />
MT34FN<br />
Motors<br />
SDM-Monitor<br />
Or<br />
ATOMIC<br />
to<br />
program<br />
SM2A and SD<br />
<strong>drives</strong><br />
SL-Monitor<br />
Or<br />
eePLC Studio<br />
to<br />
program<br />
SW<br />
<strong>drives</strong><br />
GWC<br />
Configuration<br />
c1000<br />
c1000<br />
c1000<br />
c1000<br />
c1000<br />
c2000<br />
c1000<br />
c1000<br />
TR.I.P.O.S.GW<br />
application<br />
pre-loaded<br />
None<br />
A<br />
B<br />
C<br />
D<br />
E<br />
F<br />
G<br />
Description<br />
No application<br />
pre-loaded.<br />
The unit is ready to be<br />
programmed through<br />
TR.I.P.O.S.GW<br />
Horizontal<br />
Flow Pack<br />
Vertical<br />
Flow Pack<br />
Turntable<br />
Positioning<br />
Multi Cams<br />
Management<br />
Thread Winding<br />
Machine<br />
Multi Axles<br />
Management<br />
Flexographic<br />
Machine<br />
Kit software<br />
code<br />
GWC_TRP232-00<br />
GWC_TRP232-00<br />
GWC_TRP232-00<br />
GWC_TRP232-00<br />
GWC_TRP232-00<br />
GWC_TRP232-00<br />
GWC_TRP232-00<br />
GWC_TRP232-00<br />
Kit software<br />
description<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
CD TR.I.P.O.S.GW<br />
DEMO<br />
+<br />
RS232 cable<br />
Note<br />
---<br />
Executable with<br />
SDM or SM2A systems<br />
configured as c0300<br />
Executable with<br />
SDM or SM2A systems<br />
configured as c0300<br />
Executable with<br />
SDM or SM2A systems<br />
configured as c0325<br />
Executable with<br />
SDM or SM2A systems<br />
configured as c0326<br />
Executable with<br />
SDM or SM2A systems<br />
configured as c0370<br />
Executable with<br />
SDM or SM2A systems<br />
configured as c0300<br />
Executable with<br />
SDM or SM2A systems<br />
configured as c0300<br />
System resources<br />
Mechanical data<br />
Serial interfaces Digital inputs Digital outputs Dimensions Weight<br />
2 Serial RS232/485<br />
2 Serial RS232/485<br />
8 optoisolated<br />
200 kHz 24 Vdc PNP<br />
8 optoisolated<br />
200 kHz 24 Vdc PNP<br />
8 optoisolated<br />
24 Vdc 500 mA<br />
8 optoisolated<br />
24 Vdc 500 mA<br />
194.0 x 120.0 x 45.0 mm 480 gr.<br />
194.0 x 120.0 x 45.0 mm 480 gr<br />
CONTROLLERS<br />
& GATEWAY<br />
53