

3202 Rev A Module Specifications - Advanced Micro Controls Inc
3202 Rev A Module Specifications - Advanced Micro Controls Inc
3202 Rev A Module Specifications - Advanced Micro Controls Inc

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
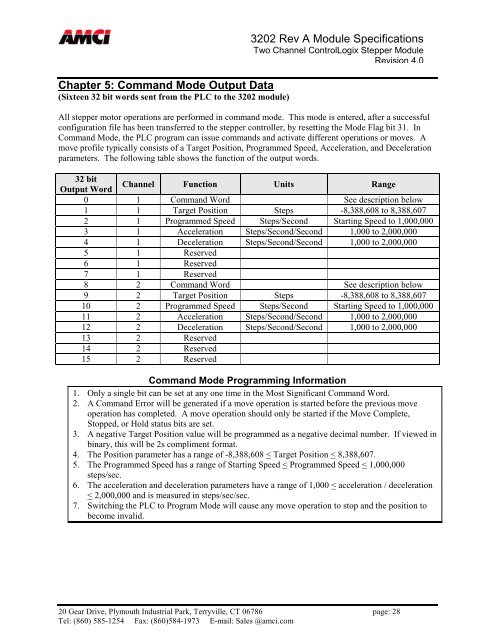
Chapter 5: Command Mode Output Data(Sixteen 32 bit words sent from the PLC to the <strong>3202</strong> module)<strong>3202</strong> <strong>Rev</strong> A <strong>Module</strong> <strong>Specifications</strong>Two Channel ControlLogix Stepper <strong>Module</strong><strong>Rev</strong>ision 4.0All stepper motor operations are performed in command mode. This mode is entered, after a successfulconfiguration file has been transferred to the stepper controller, by resetting the Mode Flag bit 31. InCommand Mode, the PLC program can issue commands and activate different operations or moves. Amove profile typically consists of a Target Position, Programmed Speed, Acceleration, and Decelerationparameters. The following table shows the function of the output words.32 bitOutput WordChannel Function Units Range0 1 Command Word See description below1 1 Target Position Steps -8,388,608 to 8,388,6072 1 Programmed Speed Steps/Second Starting Speed to 1,000,0003 1 Acceleration Steps/Second/Second 1,000 to 2,000,0004 1 Deceleration Steps/Second/Second 1,000 to 2,000,0005 1 Reserved6 1 Reserved7 1 Reserved8 2 Command Word See description below9 2 Target Position Steps -8,388,608 to 8,388,60710 2 Programmed Speed Steps/Second Starting Speed to 1,000,00011 2 Acceleration Steps/Second/Second 1,000 to 2,000,00012 2 Deceleration Steps/Second/Second 1,000 to 2,000,00013 2 Reserved14 2 Reserved15 2 ReservedCommand Mode Programming Information1. Only a single bit can be set at any one time in the Most Significant Command Word.2. A Command Error will be generated if a move operation is started before the previous moveoperation has completed. A move operation should only be started if the Move Complete,Stopped, or Hold status bits are set.3. A negative Target Position value will be programmed as a negative decimal number. If viewed inbinary, this will be 2s compliment format.4. The Position parameter has a range of -8,388,608 < Target Position < 8,388,607.5. The Programmed Speed has a range of Starting Speed < Programmed Speed < 1,000,000steps/sec.6. The acceleration and deceleration parameters have a range of 1,000 < acceleration / deceleration< 2,000,000 and is measured in steps/sec/sec.7. Switching the PLC to Program Mode will cause any move operation to stop and the position tobecome invalid.20 Gear Drive, Plymouth Industrial Park, Terryville, CT 06786 page: 28Tel: (860) 585-1254 Fax: (860)584-1973 E-mail: Sales @amci.com













