

Full paper Minimizing Energy Consumption in Hexapod Robots
Full paper Minimizing Energy Consumption in Hexapod Robots
Full paper Minimizing Energy Consumption in Hexapod Robots
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
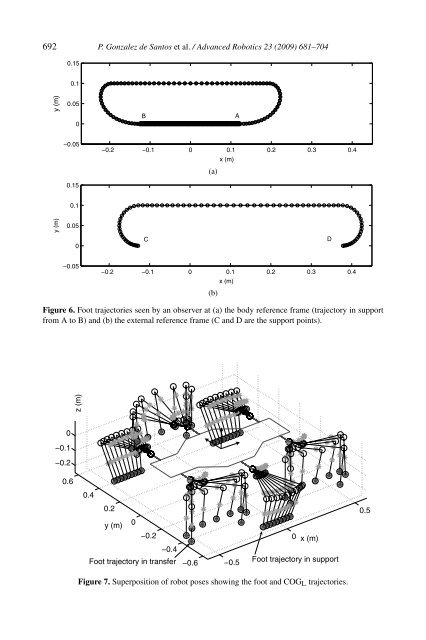
692 P. Gonzalez de Santos et al. / Advanced Robotics 23 (2009) 681–704(a)(b)Figure 6. Foot trajectories seen by an observer at (a) the body reference frame (trajectory <strong>in</strong> supportfrom A to B) and (b) the external reference frame (C and D are the support po<strong>in</strong>ts).Figure 7. Superposition of robot poses show<strong>in</strong>g the foot and COG L trajectories.













