

Full paper Minimizing Energy Consumption in Hexapod Robots
Full paper Minimizing Energy Consumption in Hexapod Robots
Full paper Minimizing Energy Consumption in Hexapod Robots

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
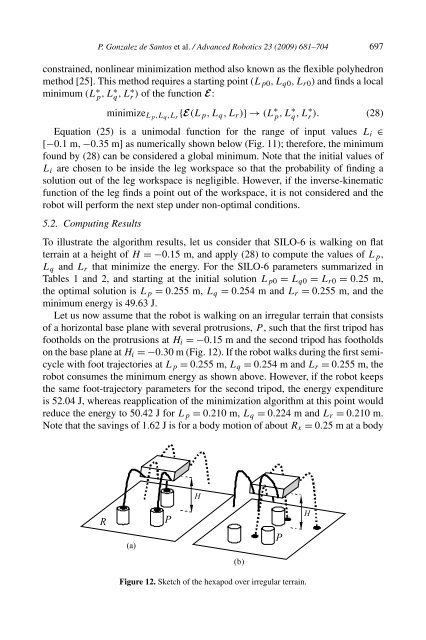
P. Gonzalez de Santos et al. / Advanced Robotics 23 (2009) 681–704 697constra<strong>in</strong>ed, nonl<strong>in</strong>ear m<strong>in</strong>imization method also known as the flexible polyhedronmethod [25]. This method requires a start<strong>in</strong>g po<strong>in</strong>t (L p0 ,L q0 ,L r0 ) and f<strong>in</strong>ds a localm<strong>in</strong>imum (L ∗ p ,L∗ q ,L∗ r ) of the function E:m<strong>in</strong>imize Lp ,L q ,L r{E(L p ,L q ,L r )}→(L ∗ p ,L∗ q ,L∗ r ). (28)Equation (25) is a unimodal function for the range of <strong>in</strong>put values L i ∈[−0.1 m, −0.35 m] as numerically shown below (Fig. 11); therefore, the m<strong>in</strong>imumfound by (28) can be considered a global m<strong>in</strong>imum. Note that the <strong>in</strong>itial values ofL i are chosen to be <strong>in</strong>side the leg workspace so that the probability of f<strong>in</strong>d<strong>in</strong>g asolution out of the leg workspace is negligible. However, if the <strong>in</strong>verse-k<strong>in</strong>ematicfunction of the leg f<strong>in</strong>ds a po<strong>in</strong>t out of the workspace, it is not considered and therobot will perform the next step under non-optimal conditions.5.2. Comput<strong>in</strong>g ResultsTo illustrate the algorithm results, let us consider that SILO-6 is walk<strong>in</strong>g on flatterra<strong>in</strong> at a height of H =−0.15 m, and apply (28) to compute the values of L p ,L q and L r that m<strong>in</strong>imize the energy. For the SILO-6 parameters summarized <strong>in</strong>Tables 1 and 2, and start<strong>in</strong>g at the <strong>in</strong>itial solution L p0 = L q0 = L r0 = 0.25 m,the optimal solution is L p = 0.255 m, L q = 0.254 m and L r = 0.255 m, and them<strong>in</strong>imum energy is 49.63 J.Let us now assume that the robot is walk<strong>in</strong>g on an irregular terra<strong>in</strong> that consistsof a horizontal base plane with several protrusions, P , such that the first tripod hasfootholds on the protrusions at H i =−0.15 m and the second tripod has footholdson the base plane at H i =−0.30 m (Fig. 12). If the robot walks dur<strong>in</strong>g the first semicyclewith foot trajectories at L p = 0.255 m, L q = 0.254 m and L r = 0.255 m, therobot consumes the m<strong>in</strong>imum energy as shown above. However, if the robot keepsthe same foot-trajectory parameters for the second tripod, the energy expenditureis 52.04 J, whereas reapplication of the m<strong>in</strong>imization algorithm at this po<strong>in</strong>t wouldreduce the energy to 50.42 J for L p = 0.210 m, L q = 0.224 m and L r = 0.210 m.Note that the sav<strong>in</strong>gs of 1.62 J is for a body motion of about R x = 0.25 m at a bodyFigure 12. Sketch of the hexapod over irregular terra<strong>in</strong>.













