

FAULHABER Motion Control Systems LM-Motors ... - MicroMo
FAULHABER Motion Control Systems LM-Motors ... - MicroMo
FAULHABER Motion Control Systems LM-Motors ... - MicroMo

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
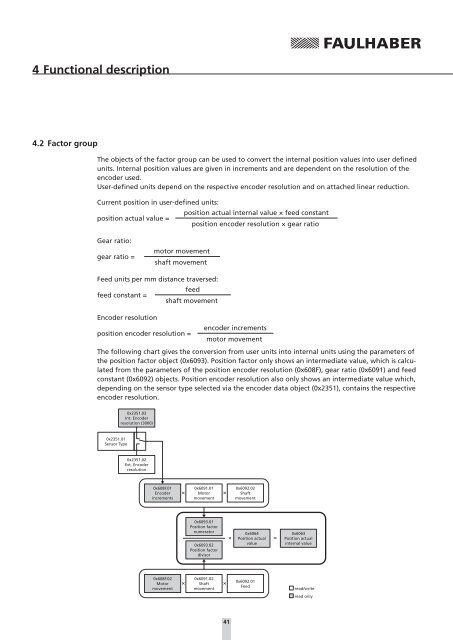
4 Functional description4.2 Factor groupThe objects of the factor group can be used to convert the internal position values into user definedunits. Internal position values are given in increments and are dependent on the resolution of theencoder used.User-defined units depend on the respective encoder resolution and on attached linear reduction.Current position in user-defined units:position actual internal value × feed constantposition actual value =position encoder resolution × gear ratioGear ratio:gear ratio =motor movementshaft movementFeed units per mm distance traversed:feedfeed constant =shaft movementEncoder resolutionencoder incrementsposition encoder resolution =motor movementThe following chart gives the conversion from user units into internal units using the parameters ofthe position factor object (0x6093). Position factor only shows an intermediate value, which is calculatedfrom the parameters of the position encoder resolution (0x608F), gear ratio (0x6091) and feedconstant (0x6092) objects. Position encoder resolution also only shows an intermediate value which,depending on the sensor type selected via the encoder data object (0x2351), contains the respectiveencoder resolution.0x2351.03Int. Encoderresolution (3000)0x2351.01Sensor Type0x2351.02Ext. Encoderresolution0x608F.01Encoderincrements0x6091.01× Motor ×movement0x6092.02Shaftmovement0x6093.01Position factornumerator0x6093.02Position factordivisor0x6064× Position actual =value0x6063Position actualinternal value0x608F.02Motormovement0x6091.02× Shaft ×movement0x6092.01Feedread/writeread only41











