design of adaptive noise canceller using lms algorithm - ijater
design of adaptive noise canceller using lms algorithm - ijater
design of adaptive noise canceller using lms algorithm - ijater
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
International Journal <strong>of</strong> Advanced Technology & Engineering Research (IJATER)www.<strong>ijater</strong>.comDESIGN OF ADAPTIVE NOISE CANCELLER USINGLMS ALGORITHMProject Members:Gyanendra Singh (0 916531056)Kiran Savita (0916531063)Shivkumar Yadav (0916531108)Electronics &Communication EngineeringKanpur Institute <strong>of</strong> Technology, Kanpur (U.P.)Project Guide:Vaibhav PurwarHead <strong>of</strong> DepartmentElectronics& Communication EngineeringKanpur institute <strong>of</strong> technology, Kanpur(u.p.)Abstract:The main goal <strong>of</strong> this paper is to present a simulationscheme to simulate an <strong>adaptive</strong> filter <strong>using</strong> LMS(Least mean square) <strong>adaptive</strong> <strong>algorithm</strong> for <strong>noise</strong>cancellation. The main objective <strong>of</strong> the <strong>noise</strong>cancellation is to estimate the <strong>noise</strong> signal and tosubtract it from original input signal plus <strong>noise</strong> signaland hence to obtain the <strong>noise</strong> free signal. There is analternative method called <strong>adaptive</strong> <strong>noise</strong> cancellationfor estimating a speech signal corrupted by anadditive <strong>noise</strong> or interference. This method uses aprimary input signal that contains the speech signaland a reference input containing <strong>noise</strong>. The referenceinput is <strong>adaptive</strong>ly filtered and subtracted from theprimary input signal to obtain the estimated signal. Inthis method the desired signal corrupted by anadditive <strong>noise</strong> can be recovered by an <strong>adaptive</strong> <strong>noise</strong><strong>canceller</strong> <strong>using</strong> LMS (least mean square) <strong>algorithm</strong>.This <strong>adaptive</strong> <strong>noise</strong> <strong>canceller</strong> is useful to improve theS/N ratio. Here we estimate the <strong>adaptive</strong> filter <strong>using</strong>MATLAB/SIMULINKenvironment.Key words: LMS <strong>algorithm</strong>, Noise cancellation,Adaptive filter, MATLAB/SIMULINK.Introduction:Noise is a nuisance or disturbance duringcommunication and it is unwanted. Noise occursbecause <strong>of</strong> many factors such as interference, delay,and overlapping. Noise problems in the environmenthave gained attention due to the tremendous growth<strong>of</strong> technology that has led to noisy engines, heavymachinery, high electromagnetic radiation devicesand other <strong>noise</strong> sources. For <strong>noise</strong> cancellation withthe help <strong>of</strong> <strong>adaptive</strong> filter and employed for variety <strong>of</strong>practical applications like the cancelling <strong>of</strong> variousforms <strong>of</strong> periodic interference in electrocardiography,the cancelling <strong>of</strong> periodic interference in speechsignals, and the cancelling <strong>of</strong> broad-band interferencein the side-lobes <strong>of</strong> an antenna array. In sound signalor speech signal, <strong>noise</strong> is very problematic because itwill difficult to understanding <strong>of</strong> the information.Speech is a very basic way for humans to conveyinformation to one another with a bandwidth <strong>of</strong> only4 kHz; speech can convey information with theemotion <strong>of</strong> a human voice. The speech signal hascertain properties: It is a one-dimensional signal, withtime as its independent variable, it is random innature, it is non-stationary, i.e. the frequencyspectrum is not constant in time. Although humanbeings have an audible frequency range <strong>of</strong> 20Hz to20 kHz, the human speech has significant frequencycomponents only up to 4 kHz. The most commonproblem in speech processing is the effect <strong>of</strong>interference <strong>noise</strong> in speech signals. In the most <strong>of</strong>practical applications Adaptive filters are used andpreferred over fixed digital filters because <strong>adaptive</strong>filters have the property on the other hand, have theability to adjust their own parameters automatically,and their <strong>design</strong> requires little or no a prioriknowledge <strong>of</strong> signal or <strong>noise</strong> characteristics. In thispaper we have to used <strong>adaptive</strong> filter for <strong>noise</strong>cancellation. The general configuration for anAdaptive filter system is shown in Fig.1. It has twoinputs: the primary input d(n), which represents thedesired signal corrupted with c undesired <strong>noise</strong>, andthe reference signal x(n), which is the undesired <strong>noise</strong>to be filtered out <strong>of</strong> the system. The goal <strong>of</strong> <strong>adaptive</strong>filtering systems is to reduce the <strong>noise</strong> portion, and toobtain the uncorrupted desired signal. In order toachieve this, a reference <strong>of</strong> the <strong>noise</strong> signal is neededand is called reference signal x(n). However, thereference signal is typically not the same signal as the<strong>noise</strong> portion <strong>of</strong> the primary amplitude, phase ortime. Therefore the reference signal cannot be simplysubtract from the primary signal to obtain the desiredportion at the output. In general, <strong>noise</strong> that affects thespeech signals can be modeled <strong>using</strong> any one <strong>of</strong> thefollowing: 1. White <strong>noise</strong>, 2. Colored <strong>noise</strong>,ISSN No: 2250-3536 Volume 3, Issue 3, May 2013 85
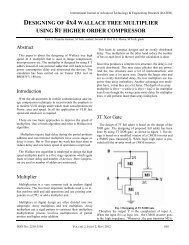
International Journal <strong>of</strong> Advanced Technology & Engineering Research (IJATER)www.<strong>ijater</strong>.comAdaptive Filter :Concept <strong>of</strong> <strong>adaptive</strong> filterrealize the <strong>adaptive</strong> <strong>noise</strong> cancellation, we use twoinputs and an <strong>adaptive</strong> filter. One input is the signalcorrupted by <strong>noise</strong> (Primary Input, which can beexpressed as s(n) x1(n)). The other input contains<strong>noise</strong> related in some way to that in the main inputbut does not contain anything related to the signal(Noise Reference Input, expressed as x(n)). The <strong>noise</strong>reference input pass through the <strong>adaptive</strong> filter andoutput y(n) is produced as close a replica as possible<strong>of</strong> x1(n). The filter readjusts itself continuously tominimize the error between x1 (n) and y (n) duringthis process. Then the output y(n) is subtracted fromthe primary input to produce the system outpute(n)=s(n)+x1(n)–y(n).This is the de<strong>noise</strong>d signal.Fig.1.Adaptive Noise Cancellation SystemS(n)- source signald(n)-primary signalx1(n)-<strong>noise</strong> signalx(n)-<strong>noise</strong> reference inputy(n)-output <strong>of</strong> <strong>adaptive</strong> filtere(n)-system output signalAdaptive Filtering :Fig. 1 shows the <strong>adaptive</strong> <strong>noise</strong> cancellation setup. Inthis application, the corrupted signal passes through afilter that tends to suppress the <strong>noise</strong> while leavingthe signal unchanged. This process is an <strong>adaptive</strong>process, which means it cannot require a prioriknowledge <strong>of</strong> signal or <strong>noise</strong> characteristics.Adaptive <strong>noise</strong> cancellation <strong>algorithm</strong>s utilize twosignal it can vary in (sensor). One signal is used tomeasure the speech + <strong>noise</strong> signal while the other isused to measure the <strong>noise</strong> signal alone. The technique<strong>adaptive</strong>ly adjusts a set <strong>of</strong> filter coefficients so as toremove the <strong>noise</strong> from the noisy signal. Thistechnique, however, requires that the <strong>noise</strong>component in the corrupted signal and the <strong>noise</strong> inthe reference channel have high coherence.Unfortunately this is a limiting factor, as themicrophones need to be separated in order to preventthe speech being included in the <strong>noise</strong> reference andthus being removed. With large separations thecoherence <strong>of</strong> the <strong>noise</strong> is limited and this limits theeffectiveness <strong>of</strong> this technique. In summary, toIn the system shown in Fig. 1 the reference input isprocessed by an <strong>adaptive</strong> filter. An <strong>adaptive</strong> filterdiffers from a fixed filter in that it automaticallyadjusts its own impulse response. Thus with theproper <strong>algorithm</strong>, the filter can operate underchanging conditions and can readjust itselfcontinuously to minimize the error signal. The errorsignal used in an <strong>adaptive</strong> process depends on thenature <strong>of</strong> the application. In <strong>noise</strong> cancelling systemsthe practical objective is to produce a system outpute(n)=s(n)+ x1 (n) –y(n) that is a best fit in the leastsquares sense to the signal s. This objective isaccomplished by feeding the system output back tothe <strong>adaptive</strong> filter and adjusting the filter through anLMS <strong>adaptive</strong> <strong>algorithm</strong> to minimize total systemoutput power. In an <strong>adaptive</strong> <strong>noise</strong> cancelling system,in other words, the system output serves as the errorsignal for the <strong>adaptive</strong> process. It might seem thatsome prior knowledge <strong>of</strong> the signal s or <strong>of</strong> the <strong>noise</strong>sx1 and x would be necessary before the filter couldbe <strong>design</strong>ed, or before it could adapt, to produce the<strong>noise</strong> cancelling s, x1 and x signal y. Assume that s,x1 , x and y are statistically stationary and have zeromeans. Assume that s is uncorrelated with x1 and x ,and suppose that x is correlated with x1 . The outpute is e=s+x1–y. (1)Squaring, one obtainse2=s2+(x1-y)2+2s(x1-y). (2)Taking expectations <strong>of</strong> both sides <strong>of</strong> (2), andrealizing that s is uncorrelated with x1 and with y,yieldsE[e2]=E[s2]+E[(x1 -y)2]+2E[s(x1 -y)]=E[s2]+E[(x1-y)2] (3)ISSN No: 2250-3536 Volume 3, Issue 3, May 2013 86
International Journal <strong>of</strong> Advanced Technology & Engineering Research (IJATER)www.<strong>ijater</strong>.comThe signal power E [s2] will be unaffected as thefilter is adjusted to minimize E[e2 ]. Accordingly, theminimum output power is mine [e2]=E[s2] +mine[(x1-y)2] (4)When the filter is adjusted so that E[e2] isminimized, E[(x1-y)2] is, therefore, also minimized.The filter output y is then a best least squaresestimate <strong>of</strong> the primary <strong>noise</strong> no. Moreover, whenE[(x1-y)2] is minimized[(e-s)2] is also minimized,since, from (1),(e-s) = (x1-y). (5)Adjusting or adapting the filter to minimize the totaloutput power is thus tantamount to ca<strong>using</strong> the outpute to be a best least squares estimate <strong>of</strong> x1 the signal sfor the given structure and adjustability <strong>of</strong> the<strong>adaptive</strong> filter and for the given reference input. Theoutput z will contain the signal s plus <strong>noise</strong>. From(l),the output <strong>noise</strong> is given by(x1-y). Sinceminimizing E[e2] minimizes E[( x1-y)2] minimizingthe total output power minimizes the output <strong>noise</strong>power. Since the signal in the output remainsconstant, minimizing the total output powermaximizes the output signal-to-<strong>noise</strong> ratio.LMS Algorithm:The LMS <strong>algorithm</strong> is a widely used <strong>algorithm</strong> for<strong>adaptive</strong> filtering. The <strong>algorithm</strong> is described by thefollowing equations:M-1 y(n) = Σwi (n)*x(n-i); (1)I = 0e(n) = d(n) – y(n (2)stability and convergence speed <strong>of</strong> the LMS<strong>algorithm</strong>. The LMS <strong>algorithm</strong> is convergent in themean square if and only if u satisfies the condition: 0< u < 2 / tap-input powerM-1where tap-input power = ΣE[|u(n-k)2|].K=0Simulation Results:In this section we evaluate the performance <strong>of</strong> LMS<strong>algorithm</strong>s in <strong>noise</strong> cancellation setup Fig. 1. Inputsignal is speech signal whereas Gaussian <strong>noise</strong> wasused as <strong>noise</strong> signal. The LMS <strong>adaptive</strong> filter uses thereference signal and the desired signal, toautomatically match the filter response. As itconverges to the correct filter model, the filtered<strong>noise</strong> is subtracted and the error signal should containonly the original signal. The desired signal iscomposed <strong>of</strong> colored <strong>noise</strong> and an audio signal froma .wav file. The first input signal to the <strong>adaptive</strong> filteris white <strong>noise</strong>. This demo uses the <strong>adaptive</strong> filter toremove the <strong>noise</strong> from the signal output. When yourun this demo, you hear both <strong>noise</strong> and a personrecorded voice. Over time, the <strong>adaptive</strong> filter in themodel filters out the <strong>noise</strong> so you only hear therecorded voice (Original signal).The two signals wereadded and subsequently fed into the simulation <strong>of</strong>LMS <strong>adaptive</strong> filter. The order <strong>of</strong> the filter was set toM = 40. The parameter μ is varied. Various outputsare obtained for various step size i.e.μ = 0.002, 0.04system reaches steady state faster when the step sizeis larger. Fig.2. Original signal, Noisy signal andfilter signal for LMS step size i.e.μ= 0.002wi (n+1) = wi (n) + 2ue(n)x(n-i) (3)In these equations, the tap inputs x(n),x(n-1),……,x(n-M+1) form the elements <strong>of</strong> the referencesignal x(n), where M-1 is the number <strong>of</strong> delayelements. d(n) denotes the primary input signal, e(n)denotes the error signal and constitutes the overallsystem output. wi(n) denotes the tap weight at the nthiteration. In equation (3), the tap weights update inaccordance with the estimation error. And the scalingfactor u is the step-size parameter u controls theFigure:2 Original SignalISSN No: 2250-3536 Volume 3, Issue 3, May 2013 87
4) Raj Kumar Thenu & S.K. Agarwal ,“Hardware Implementation Of AdaptiveAlgorithms for Noise Cancellation”,International Conference On NetworkCommunication And Computer, 2011, pp553-557.5) Raj Kumar Thenu & S.K. Agarwal ,“Simulation And Performance Analysis OfAdaptive Filter In Noise Cancellation”,International Journal <strong>of</strong> Engineering scienceAnd Technology, Vol. 2(9), 2010, pp4373-4378.6) Soni Changlani & Dr.M.K.Gupta, “Theapplications And Simulation <strong>of</strong> AdaptiveFilter In Speech Enhancement”, InternationalJournal <strong>of</strong> Computer Engineering AndArchetectureVol. 1,No. 1, June 2011, pp95-101.7) V.R.Vijaykumar, P.T.Vanathi & P.Kangasapabathy, “Modified AdaptiveFiltering Algorithm For Noise Cancellation InSpeech signals”, Electronics And ElectricalEngineering, Elektronika IRElektrotechnika,ISSN1392-1215,No.2(74),2007,pp17-20.8) Lilatul Ferdouse, Nasrin Akhter, TamannaHaque , Nipa3 and Fariha Tasmin Jaigirdar,“Simulation And Performance Analysis <strong>of</strong>Adaptive Filtering Algorithm In NoiseCancellation, International Journal OfComputer science Issues, Vol.8, Issue 1,January 2011, pp 185-192.9) Mamta M.Mahajan & S.S.Godbole, “DesignOf Least Mean Square AlgorithmForAdaptive Noise Canceller”, InternationalJournal Of Advanced Engineering ScienceAnd Technologies,2011, Vol. No. 5, Issue NoInternational Journal <strong>of</strong> Advanced Technology & Engineering Research (IJATER)www.<strong>ijater</strong>.comISSN No: 2250-3536 Volume 3, Issue 3, May 2013 89