design of adaptive noise canceller using lms algorithm - ijater
design of adaptive noise canceller using lms algorithm - ijater
design of adaptive noise canceller using lms algorithm - ijater
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
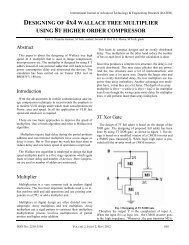
International Journal <strong>of</strong> Advanced Technology & Engineering Research (IJATER)www.<strong>ijater</strong>.comAdaptive Filter :Concept <strong>of</strong> <strong>adaptive</strong> filterrealize the <strong>adaptive</strong> <strong>noise</strong> cancellation, we use twoinputs and an <strong>adaptive</strong> filter. One input is the signalcorrupted by <strong>noise</strong> (Primary Input, which can beexpressed as s(n) x1(n)). The other input contains<strong>noise</strong> related in some way to that in the main inputbut does not contain anything related to the signal(Noise Reference Input, expressed as x(n)). The <strong>noise</strong>reference input pass through the <strong>adaptive</strong> filter andoutput y(n) is produced as close a replica as possible<strong>of</strong> x1(n). The filter readjusts itself continuously tominimize the error between x1 (n) and y (n) duringthis process. Then the output y(n) is subtracted fromthe primary input to produce the system outpute(n)=s(n)+x1(n)–y(n).This is the de<strong>noise</strong>d signal.Fig.1.Adaptive Noise Cancellation SystemS(n)- source signald(n)-primary signalx1(n)-<strong>noise</strong> signalx(n)-<strong>noise</strong> reference inputy(n)-output <strong>of</strong> <strong>adaptive</strong> filtere(n)-system output signalAdaptive Filtering :Fig. 1 shows the <strong>adaptive</strong> <strong>noise</strong> cancellation setup. Inthis application, the corrupted signal passes through afilter that tends to suppress the <strong>noise</strong> while leavingthe signal unchanged. This process is an <strong>adaptive</strong>process, which means it cannot require a prioriknowledge <strong>of</strong> signal or <strong>noise</strong> characteristics.Adaptive <strong>noise</strong> cancellation <strong>algorithm</strong>s utilize twosignal it can vary in (sensor). One signal is used tomeasure the speech + <strong>noise</strong> signal while the other isused to measure the <strong>noise</strong> signal alone. The technique<strong>adaptive</strong>ly adjusts a set <strong>of</strong> filter coefficients so as toremove the <strong>noise</strong> from the noisy signal. Thistechnique, however, requires that the <strong>noise</strong>component in the corrupted signal and the <strong>noise</strong> inthe reference channel have high coherence.Unfortunately this is a limiting factor, as themicrophones need to be separated in order to preventthe speech being included in the <strong>noise</strong> reference andthus being removed. With large separations thecoherence <strong>of</strong> the <strong>noise</strong> is limited and this limits theeffectiveness <strong>of</strong> this technique. In summary, toIn the system shown in Fig. 1 the reference input isprocessed by an <strong>adaptive</strong> filter. An <strong>adaptive</strong> filterdiffers from a fixed filter in that it automaticallyadjusts its own impulse response. Thus with theproper <strong>algorithm</strong>, the filter can operate underchanging conditions and can readjust itselfcontinuously to minimize the error signal. The errorsignal used in an <strong>adaptive</strong> process depends on thenature <strong>of</strong> the application. In <strong>noise</strong> cancelling systemsthe practical objective is to produce a system outpute(n)=s(n)+ x1 (n) –y(n) that is a best fit in the leastsquares sense to the signal s. This objective isaccomplished by feeding the system output back tothe <strong>adaptive</strong> filter and adjusting the filter through anLMS <strong>adaptive</strong> <strong>algorithm</strong> to minimize total systemoutput power. In an <strong>adaptive</strong> <strong>noise</strong> cancelling system,in other words, the system output serves as the errorsignal for the <strong>adaptive</strong> process. It might seem thatsome prior knowledge <strong>of</strong> the signal s or <strong>of</strong> the <strong>noise</strong>sx1 and x would be necessary before the filter couldbe <strong>design</strong>ed, or before it could adapt, to produce the<strong>noise</strong> cancelling s, x1 and x signal y. Assume that s,x1 , x and y are statistically stationary and have zeromeans. Assume that s is uncorrelated with x1 and x ,and suppose that x is correlated with x1 . The outpute is e=s+x1–y. (1)Squaring, one obtainse2=s2+(x1-y)2+2s(x1-y). (2)Taking expectations <strong>of</strong> both sides <strong>of</strong> (2), andrealizing that s is uncorrelated with x1 and with y,yieldsE[e2]=E[s2]+E[(x1 -y)2]+2E[s(x1 -y)]=E[s2]+E[(x1-y)2] (3)ISSN No: 2250-3536 Volume 3, Issue 3, May 2013 86