

Modeling and Optimization of Traffic Flow in Urban Areas - Czech ...
Modeling and Optimization of Traffic Flow in Urban Areas - Czech ...
Modeling and Optimization of Traffic Flow in Urban Areas - Czech ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
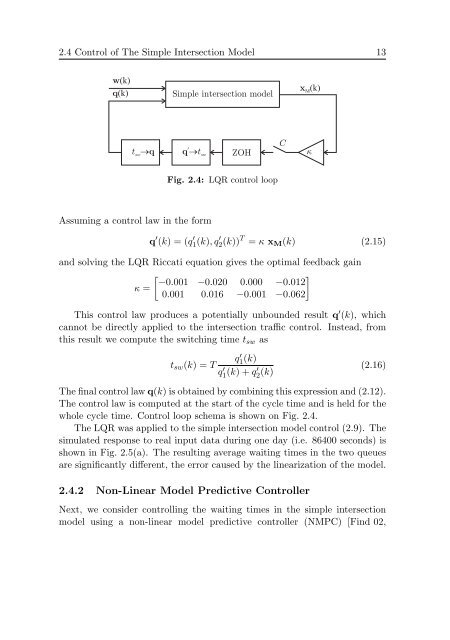
2.4 Control <strong>of</strong> The Simple Intersection Model 13w(k)q(k)Simple <strong>in</strong>tersection modelx M(k)t swq q 0 t swZOHC∙Fig. 2.4: LQR control loopAssum<strong>in</strong>g a control law <strong>in</strong> the formq ′ (k) = (q ′ 1(k), q ′ 2(k)) T = κ x M (k) (2.15)<strong>and</strong> solv<strong>in</strong>g the LQR Riccati equation gives the optimal feedback ga<strong>in</strong>[ ]−0.001 −0.020 0.000 −0.012κ =0.001 0.016 −0.001 −0.062This control law produces a potentially unbounded result q ′ (k), whichcannot be directly applied to the <strong>in</strong>tersection traffic control. Instead, fromthis result we compute the switch<strong>in</strong>g time t sw ast sw (k) = Tq ′ 1 (k)q ′ 1 (k) + q′ 2 (k) (2.16)The f<strong>in</strong>al control law q(k) is obta<strong>in</strong>ed by comb<strong>in</strong><strong>in</strong>g this expression <strong>and</strong> (2.12).The control law is computed at the start <strong>of</strong> the cycle time <strong>and</strong> is held for thewhole cycle time. Control loop schema is shown on Fig. 2.4.The LQR was applied to the simple <strong>in</strong>tersection model control (2.9). Thesimulated response to real <strong>in</strong>put data dur<strong>in</strong>g one day (i.e. 86400 seconds) isshown <strong>in</strong> Fig. 2.5(a). The result<strong>in</strong>g average wait<strong>in</strong>g times <strong>in</strong> the two queuesare significantly different, the error caused by the l<strong>in</strong>earization <strong>of</strong> the model.2.4.2 Non-L<strong>in</strong>ear Model Predictive ControllerNext, we consider controll<strong>in</strong>g the wait<strong>in</strong>g times <strong>in</strong> the simple <strong>in</strong>tersectionmodel us<strong>in</strong>g a non-l<strong>in</strong>ear model predictive controller (NMPC) [F<strong>in</strong>d 02,













