

Modeling and Optimization of Traffic Flow in Urban Areas - Czech ...
Modeling and Optimization of Traffic Flow in Urban Areas - Czech ...
Modeling and Optimization of Traffic Flow in Urban Areas - Czech ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
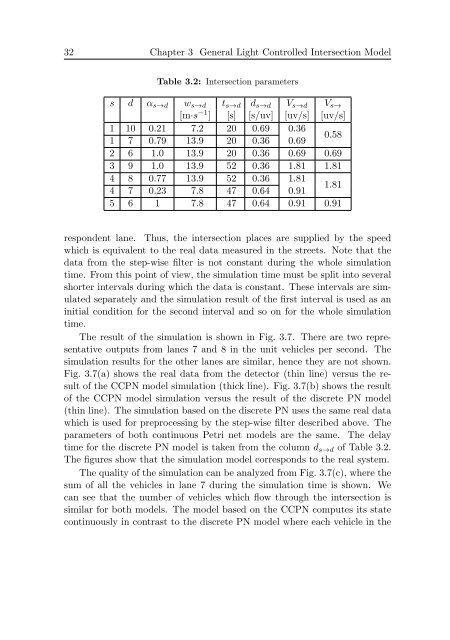
32 Chapter 3 General Light Controlled Intersection ModelTable 3.2: Intersection parameterss d α s→d w s→d t s→d d s→d V s→d V s→[m·s −1 ] [s] [s/uv] [uv/s] [uv/s]1 10 0.21 7.2 20 0.69 0.361 7 0.79 13.9 20 0.36 0.690.582 6 1.0 13.9 20 0.36 0.69 0.693 9 1.0 13.9 52 0.36 1.81 1.814 8 0.77 13.9 52 0.36 1.814 7 0.23 7.8 47 0.64 0.911.815 6 1 7.8 47 0.64 0.91 0.91respondent lane. Thus, the <strong>in</strong>tersection places are supplied by the speedwhich is equivalent to the real data measured <strong>in</strong> the streets. Note that thedata from the step-wise filter is not constant dur<strong>in</strong>g the whole simulationtime. From this po<strong>in</strong>t <strong>of</strong> view, the simulation time must be split <strong>in</strong>to severalshorter <strong>in</strong>tervals dur<strong>in</strong>g which the data is constant. These <strong>in</strong>tervals are simulatedseparately <strong>and</strong> the simulation result <strong>of</strong> the first <strong>in</strong>terval is used as an<strong>in</strong>itial condition for the second <strong>in</strong>terval <strong>and</strong> so on for the whole simulationtime.The result <strong>of</strong> the simulation is shown <strong>in</strong> Fig. 3.7. There are two representativeoutputs from lanes 7 <strong>and</strong> 8 <strong>in</strong> the unit vehicles per second. Thesimulation results for the other lanes are similar, hence they are not shown.Fig. 3.7(a) shows the real data from the detector (th<strong>in</strong> l<strong>in</strong>e) versus the result<strong>of</strong> the CCPN model simulation (thick l<strong>in</strong>e). Fig. 3.7(b) shows the result<strong>of</strong> the CCPN model simulation versus the result <strong>of</strong> the discrete PN model(th<strong>in</strong> l<strong>in</strong>e). The simulation based on the discrete PN uses the same real datawhich is used for preprocess<strong>in</strong>g by the step-wise filter described above. Theparameters <strong>of</strong> both cont<strong>in</strong>uous Petri net models are the same. The delaytime for the discrete PN model is taken from the column d s→d <strong>of</strong> Table 3.2.The figures show that the simulation model corresponds to the real system.The quality <strong>of</strong> the simulation can be analyzed from Fig. 3.7(c), where thesum <strong>of</strong> all the vehicles <strong>in</strong> lane 7 dur<strong>in</strong>g the simulation time is shown. Wecan see that the number <strong>of</strong> vehicles which flow through the <strong>in</strong>tersection issimilar for both models. The model based on the CCPN computes its statecont<strong>in</strong>uously <strong>in</strong> contrast to the discrete PN model where each vehicle <strong>in</strong> the













