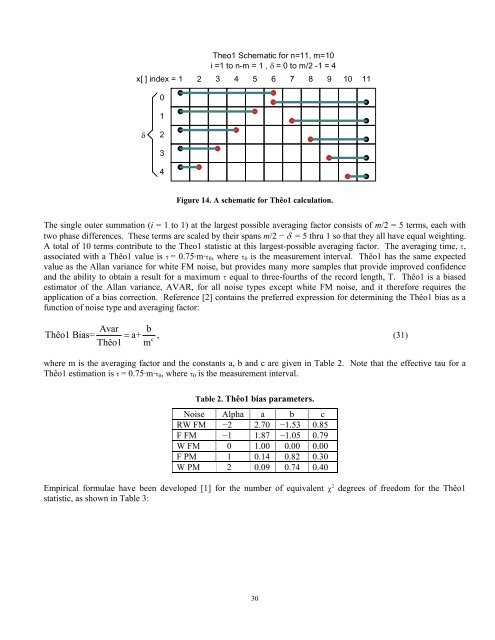
x[ ] index =01Theo1 Schematic for n=11, m=10i =1 to n-m = 1 , δ = 0 to m/2 -1 = 41 2 3 4 5 6 7 8 9 10 11δ234Figure 14. A schematic for Thêo1 calculation.The single outer summation (i = 1 to 1) at the largest possible averaging factor consists <strong>of</strong> m/2 = 5 terms, each withtwo phase differences. These terms are scaled by their spans m/2 − δ = 5 thru 1 so that they all have equal weighting.A total <strong>of</strong> 10 terms contribute to the Theo1 statistic at this largest-possible averaging factor. The averaging time, τ,associated with a Thêo1 value is τ = 0.75·m·τ 0 , where τ 0 is the measurement interval. Thêo1 has the same expectedvalue as the Allan variance for white FM noise, but provides many more samples that provide improved confidenceand the ability to obtain a result for a maximum τ equal to three-fourths <strong>of</strong> the record length, T. Thêo1 is a biasedestimator <strong>of</strong> the Allan variance, AVAR, for all noise types except white FM noise, and it therefore requires theapplication <strong>of</strong> a bias correction. Reference [2] contains the preferred expression for determining the Thêo1 bias as afunction <strong>of</strong> noise type and averaging factor:Avar bThêo1 Bias= = a+ , (31)cThêo1 mwhere m is the averaging factor and the constants a, b and c are given in Table 2. Note that the effective tau for aThêo1 estimation is τ = 0.75·m·τ 0 , where τ 0 is the measurement interval.Table 2. Thêo1 bias parameters.Noise Alpha a b cRW FM −2 2.70 −1.53 0.85F FM −1 1.87 −1.05 0.79W FM 0 1.00 0.00 0.00F PM 1 0.14 0.82 0.30W PM 2 0.09 0.74 0.40Empirical formulae have been developed [1] for the number <strong>of</strong> equivalent χ 2 degrees <strong>of</strong> freedom for the Thêo1statistic, as shown in Table 3:30
NoiseRW FMTable 3. Thêo1 EDF FormulaeEDFF 44 . N − 2IFHG29 . r K JHGc2 3F N − . Nr−. rIFr I3HGNr KJ HGr + 23 . KJ32 /L . N + . . N + . OFr I−32 /NM r N QP HGr + 52 . KJF24. 798N − 6. 374Nr+12.387rIF12 /HG br+ g N −rKJ HGr +F . ( N + )( N − r/ ) I rHGN − r K J F IHGr + 114 . K JF FM 2 13 35W FM 41 08 31 65F PMW PM 086 1 4 344 . N −1) −86 . r( 44 . N − 1) + 114 . r2(. 44N− 3)2 2r36. 6 ( ) 03 .where r = 0.75m, and with the condition τ 0 ≤ T/10.I K JhIKJ5.2.16. ThêoHThêo1 has the same expected value as the Allan variance if bias is removed [2]. It isuseful to combine a bias-removed version <strong>of</strong> Thêo1, called ThêoBR, with AVAR toproduce a composite stability plot. The composite is called “ThêoH” which is shortfor “hybrid-ThêoBR” [3]. ThêoH is the best statistic available for estimating thestability level and type <strong>of</strong> noise <strong>of</strong> a frequency source, particularly at large averagingtimes and with a mixture <strong>of</strong> noise types [4].NewThêo1, ThêoBR , andThêoH are versions <strong>of</strong> Thêo1that provide bias removal andcombination with the Allanvariance.The NewThêo1 algorithm <strong>of</strong> Reference [2] provides a method <strong>of</strong> automatic bias correction for a Thêo1 estimationbased on the average ratio <strong>of</strong> the Allan and Thêo1 variances over a range <strong>of</strong> averaging factors:n⎡ 1 Avar( m=9+3i,τ0,N)⎤NewThêo1( m, τ0, N)= ⎢ ∑ ⎥Thêo1( m, τ0, N)⎣n+1 i=0 Thêo1( m= 12 + 4 i, τ0, N), (32)⎦where⎢N⎥n =⎢−3 , and ⎢⎣ ⎥⎦⎣30⎥⎦denotes the floor function.NewThêo1 was used in Reference [2] to form a composite AVAR/ NewThêo1 result called LONG, which has beensuperseded by ThêoH (see below).ThêoBR [3] is an improved bias-removed version <strong>of</strong> Thêo1 given byn⎡ 1 Avar( m=9+3i,τ0,N)⎤ThêoBR( m, τ0, N)= ⎢ ∑ ⎥Thêo1( m, τ0, N)⎣n+1 i=0 Thêo1( m= 12 + 4 i, τ0, N), (33)⎦⎢N⎥where n =⎢−3 , and ⎢⎣ ⎥⎦⎣ 6 ⎥⎦denotes the floor function.31
- Page 1 and 2: NIST Special Publication 1065Handbo
- Page 3 and 4: NIST Special Publication 1065Handbo
- Page 6 and 7: PrefaceI have had the great privile
- Page 8 and 9: 5.12. MTOT BIAS FUNCTION ..........
- Page 11 and 12: 1 IntroductionThis handbook describ
- Page 13 and 14: Original Allan (a)Overlapping Allan
- Page 15 and 16: 3 Definitions and TerminologyThe fi
- Page 17 and 18: 15000Random Run Noise50Random Walk
- Page 19 and 20: 5 Time Domain StabilityThe stabilit
- Page 21 and 22: step) are the sample period τ 0 an
- Page 23 and 24: (a)(c)(b)Figure 5. (a) Simulated fr
- Page 25 and 26: In terms of phase data, the Allan v
- Page 27 and 28: 22 df ⋅ sχ = , (12)2σwhere χ²
- Page 29 and 30: References for Time Variance1. D.W.
- Page 31 and 32: M− 3m+1 j+ m−121⎧⎫Hσy( τ)
- Page 33 and 34: References for Hadamard Variance1.
- Page 35 and 36: 5.2.12. Modified Total VarianceThe
- Page 37 and 38: Fractional Frequency Data y i, i =
- Page 39: It is necessary to identify the dom
- Page 43 and 44: References for Thêo1, NewThêo1, T
- Page 45 and 46: where S φ is the spectral density
- Page 47 and 48: References for Dynamic Stability1.
- Page 49 and 50: 1000100N=500250100Full EDF Algorith
- Page 51 and 52: The edf for the modified Allan vari
- Page 53 and 54: References for Confidence Intervals
- Page 55 and 56: 5.5.4. The Lag 1 AutocorrelationThe
- Page 57 and 58: The input data should be for the pa
- Page 59 and 60: 5.9. B 3 Bias FunctionThe B 3 bias
- Page 61 and 62: References for Bias Functions1. “
- Page 63 and 64: Figure 24. Frequency stability plot
- Page 65 and 66: include points at all possible tau
- Page 67 and 68: x(t) = a + bt, where slope = y(t) =
- Page 69 and 70: Linear frequency drift can be estim
- Page 71 and 72: References for Environmental Sensit
- Page 73 and 74: AllandeviationHadamarddeviationTota
- Page 75 and 76: For πτf
- Page 78 and 79: S(f)yS(f)=x, (59)(2π f)2where S x
- Page 80 and 81: preferred, either because of measur
- Page 82 and 83: References for Spectral Analysis1.
- Page 84 and 85: where the h α terms define the lev
- Page 86 and 87: The expected PSD values that corres
- Page 88 and 89: 8.1. White Noise GenerationWhite no
- Page 90 and 91:
9 Measuring SystemsFrequency measur
- Page 92 and 93:
factor. For example, if two 5 MHz s
- Page 94 and 95:
Figure 37. Random telegraph signal
- Page 96 and 97:
10 Analysis ProcedureA frequency st
- Page 98 and 99:
5 Remove the frequencydrift, leavin
- Page 100 and 101:
10.4. Gap HandlingGaps should be in
- Page 102 and 103:
References for Gaps, Jumps, and Out
- Page 104 and 105:
Table 23. Stability data for unit u
- Page 106 and 107:
B1 ⎡ ⎤∑∑− , (72)⎣ ⎦M
- Page 108 and 109:
The total deviation canprovide bett
- Page 110 and 111:
The Hadamard variance isinsensitive
- Page 112 and 113:
Table 28. Detection of periodic com
- Page 114 and 115:
11.6. White FM Noise of a Frequency
- Page 116 and 117:
12 SoftwareSoftware is necessary to
- Page 118 and 119:
This expression produces a series o
- Page 120 and 121:
13 GlossaryThe following terms are
- Page 122 and 123:
14 Bibliography• NotesA. These re
- Page 124 and 125:
44. P. Lesage and T. Ayi, “Charac
- Page 126 and 127:
81. J. McGee and D.A. Howe, “Thê
- Page 128 and 129:
• Noise Identification122. J.A. B
- Page 130 and 131:
162. W.J. Riley, “Addendum to a T
- Page 132 and 133:
OOutlier . 41, 75, 106, 108, 109, 1
- Page 135 and 136:
NIST Technical PublicationsPeriodic