download LR pdf - Kabk
download LR pdf - Kabk
download LR pdf - Kabk

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
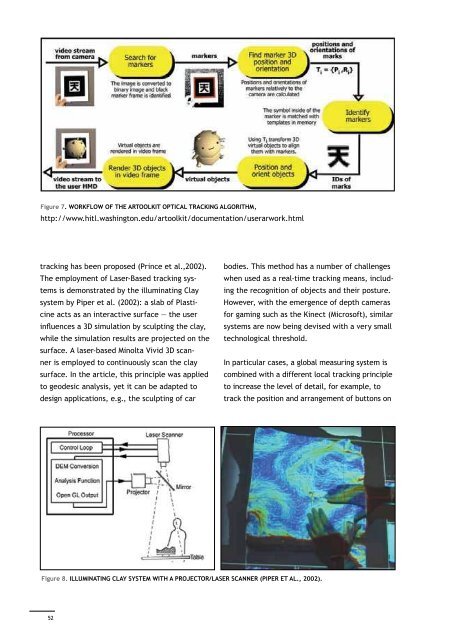
Figure 7. Workflow of the ARToolkit optical tracking algorithm,http://www.hitl.washington.edu/artoolkit/documentation/userarwork.htmltracking has been proposed (Prince et al.,2002). bodies. This method has a number of challengesThe employment of Laser-Based tracking systemsis demonstrated by the illuminating Clay ing the recognition of objects and their posture.when used as a real-time tracking means, includ-system by Piper et al. (2002): a slab of Plasticineacts as an interactive surface — the user for gaming such as the Kinect (Microsoft), similarHowever, with the emergence of depth camerasinfluences a 3D simulation by sculpting the clay, systems are now being devised with a very smallwhile the simulation results are projected on the technological threshold.surface. A laser-based Minolta Vivid 3D scanneris employed to continuously scan the clay In particular cases, a global measuring system issurface. In the article, this principle was applied combined with a different local tracking principleto geodesic analysis, yet it can be adapted to to increase the level of detail, for example, todesign applications, e.g., the sculpting of car track the position and arrangement of buttons onFigure 8. Illuminating clay system with a projector/laser scanner (Piper et al., 2002).the object’s surface. Such local positioning systemsmight have less advanced technical requirements;for example, the sampling frequency canbe decreased to only once a minute. One localtracking system is based on magnetic resonance,as used in digital drawing tablets. The Sensetabledemonstrates this by equipping an altered commercialdigital drawing tablet with custom-madewireless interaction devices (Patten et al., 2001).The Senseboard (Jacob et al., 2002) has similarfunctions and an intricate grid of RFID receiversto determine the (2D) location of an RFID tag ona board. In practice, these systems rely on a rigidtracking table, but it is possible to extend this toa flexible sensing grid. A different technology wasproposed by Hudson (2004) to use LED pixels aslight emitters and sensors. By operating one pixelas a sensor whilst its neighbours are illuminated,it is possible to detect light reflected from afingertip close to the surface. This principle couldbe applied to embedded displays, as mentionedin Section 2.3.3.2 Event sensingApart from location and orientation tracking,Augmented prototyping applications requireinter action with parts of the physical object,for example, to mimic the interaction with theartefact. This interaction differs per AR scenario,so a variety of events should be sensedto cater to these applications.Physical sensorsThe employment of traditional sensors labelled‘physical widgets’ (phidgets) has been studiedextensively in the Computer-Human Interface(CHI) community. Greenberg and Fitchett (2001)introduced a simple electronics hardware andsoftware library to interface PCs with sensors(and actuators) that can be used to discernuser interaction. The sensors include switches,sliders, rotation knobs and sensors to measureforce, touch and light. More elaborate componentslike a mini joystick, Infrared (IR) motionsensor, air pressure and temperature sensor arecommercially available. Similar initiatives areiStuff (Ballagas et al., 2003), which also hosts anumber of wireless connections to sensors. Somesystems embed switches with short-range wirelessconnections, for example, the Switcherooand Calder systems (Avrahami and Hudson, 2002;Lee et al., 2004) (cf. Figure 9). This allows agreater freedom in modifying the location of theinteractive components while prototyping. TheSwitcheroo system uses custom-made RFID tags.A receiver antenna has to be located nearby(within a 10-cm distance), so the movement envelopeis rather small, while the physical modelis wired to a workstation. The Calder toolkit(Lee et al., 2004) uses a capacitive couplingtechnique that has a smaller range (6 cm withsmall antennae), but is able to receive and transmitfor long periods on a small 12 mm coin cell.Other active wireless technologies would drawmore power, leading to a system that wouldonly fit a few hours. Although the costs for thissystem have not been specified, only standardelectronics components are required to buildsuch a receiver.Hand trackingInstead of attaching sensors to the physicalenvironment, fingertip and hand trackingtechnologies can also be used to generate userevents. Embedded skins represent a type ofinteractive surface technology that allows theaccurate measurement of touch on the object’ssurface (Paradiso et al., 2000). For example, theSmartskin by Reikimoto (2002) consists of a flexiblegrid of antennae. The proximity or touch ofhuman fingers changes the capacity locally in thegrid and establishes a multi-finger tracking cloth,which can be wrapped around an object. Such asolution could be combined with embedded displays,as discussed in Section 2.3. Direct electric52 53