

PRODUCT CATALOG
PRODUCT CATALOG - Precise Automation
PRODUCT CATALOG - Precise Automation
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
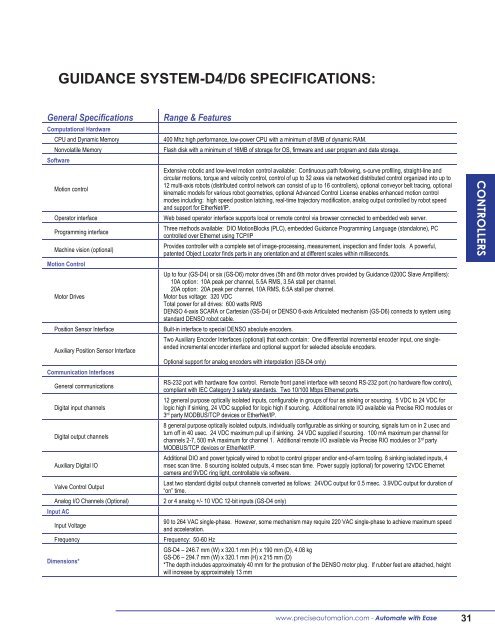
GUIDANCE SYSTEM-D4/D6 SPECIFICATIONS:<br />
General Specifications<br />
Computational Hardware<br />
CPU and Dynamic Memory<br />
Nonvolatile Memory<br />
Software<br />
Motion control<br />
Operator interface<br />
Programming interface<br />
Machine vision (optional)<br />
Motion Control<br />
Motor Drives<br />
Position Sensor Interface<br />
Auxiliary Position Sensor Interface<br />
Communication Interfaces<br />
General communications<br />
Digital input channels<br />
Digital output channels<br />
Auxiliary Digital IO<br />
Valve Control Output<br />
Analog I/O Channels (Optional)<br />
Input AC<br />
Input Voltage<br />
Frequency<br />
Dimensions*<br />
Range & Features<br />
400 Mhz high performance, low-power CPU with a minimum of 8MB of dynamic RAM.<br />
Flash disk with a minimum of 16MB of storage for OS, firmware and user program and data storage.<br />
Extensive robotic and low-level motion control available: Continuous path following, s-curve profiling, straight-line and<br />
circular motions, torque and velocity control, control of up to 32 axes via networked distributed control organized into up to<br />
12 multi-axis robots (distributed control network can consist of up to 16 controllers), optional conveyor belt tracing, optional<br />
kinematic models for various robot geometries, optional Advanced Control License enables enhanced motion control<br />
modes including: high speed position latching, real-time trajectory modification, analog output controlled by robot speed<br />
and support for EtherNet/IP.<br />
Web based operator interface supports local or remote control via browser connected to embedded web server.<br />
Three methods available: DIO MotionBlocks (PLC), embedded Guidance Programming Language (standalone), PC<br />
controlled over Ethernet using TCP/IP<br />
Provides controller with a complete set of image-processing, measurement, inspection and finder tools. A powerful,<br />
patented Object Locator finds parts in any orientation and at different scales within milliseconds.<br />
Up to four (GS-D4) or six (GS-D6) motor drives (5th and 6th motor drives provided by Guidance 0200C Slave Amplifiers):<br />
10A option: 10A peak per channel, 5.5A RMS, 3.5A stall per channel.<br />
20A option: 20A peak per channel, 10A RMS, 6.5A stall per channel.<br />
Motor bus voltage: 320 VDC<br />
Total power for all drives: 600 watts RMS<br />
DENSO 4-axis SCARA or Cartesian (GS-D4) or DENSO 6-axis Articulated mechanism (GS-D6) connects to system using<br />
standard DENSO robot cable.<br />
Built-in interface to special DENSO absolute encoders.<br />
Two Auxiliary Encoder Interfaces (optional) that each contain: One differential incremental encoder input, one singleended<br />
incremental encoder interface and optional support for selected absolute encoders.<br />
Optional support for analog encoders with interpolation (GS-D4 only)<br />
RS-232 port with hardware flow control. Remote front panel interface with second RS-232 port (no hardware flow control),<br />
compliant with IEC Category 3 safety standards. Two 10/100 Mbps Ethernet ports.<br />
12 general purpose optically isolated inputs, configurable in groups of four as sinking or sourcing. 5 VDC to 24 VDC for<br />
logic high if sinking, 24 VDC supplied for logic high if sourcing. Additional remote I/O available via Precise RIO modules or<br />
3 rd party MODBUS/TCP devices or EtherNet/IP.<br />
8 general purpose optically isolated outputs, individually configurable as sinking or sourcing, signals turn on in 2 usec and<br />
turn off in 40 usec. 24 VDC maximum pull up if sinking. 24 VDC supplied if sourcing. 100 mA maximum per channel for<br />
channels 2-7, 500 mA maximum for channel 1. Additional remote I/O available via Precise RIO modules or 3 rd party<br />
MODBUS/TCP devices or EtherNet/IP.<br />
Additional DIO and power typically wired to robot to control gripper and/or end-of-arm tooling. 8 sinking isolated inputs, 4<br />
msec scan time. 8 sourcing isolated outputs, 4 msec scan time. Power supply (optional) for powering 12VDC Ethernet<br />
camera and 9VDC ring light, controllable via software.<br />
Last two standard digital output channels converted as follows: 24VDC output for 0.5 msec. 3.9VDC output for duration of<br />
“on” time.<br />
2 or 4 analog +/- 10 VDC 12-bit inputs (GS-D4 only)<br />
90 to 264 VAC single-phase. However, some mechanism may require 220 VAC single-phase to achieve maximum speed<br />
and acceleration.<br />
Frequency: 50-60 Hz<br />
GS-D4 – 246.7 mm (W) x 320.1 mm (H) x 190 mm (D), 4.08 kg<br />
GS-D6 – 294.7 mm (W) x 320.1 mm (H) x 215 mm (D)<br />
*The depth includes approximately 40 mm for the protrusion of the DENSO motor plug. If rubber feet are attached, height<br />
will increase by approximately 13 mm<br />
CONTROLLERS<br />
www.preciseautomation.com - Automate with Ease 31