

tidu271

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
www.ti.com<br />
Theory of Operation<br />
I1<br />
R I1<br />
C I_CM1<br />
R RTD<br />
R I2<br />
C I_DIFF<br />
GAIN<br />
ΔΣ<br />
ADC<br />
R ZERO<br />
I2<br />
REFP<br />
REFN<br />
C I_CM2<br />
C R_CM1 C R_CM2<br />
C R_DIFF<br />
R R1<br />
R R2<br />
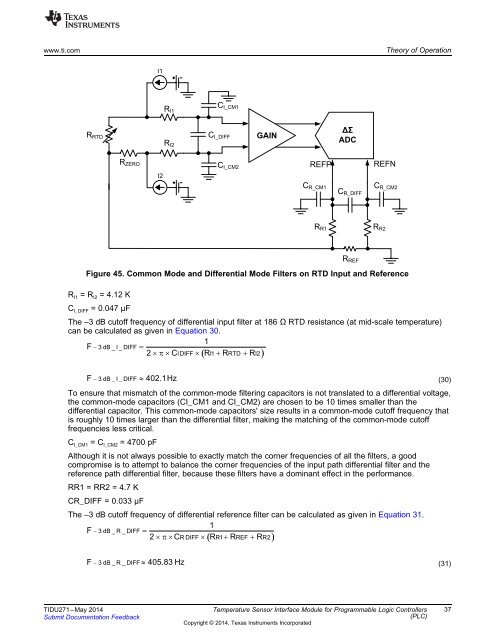
The –3 dB cutoff frequency of differential input filter at 186 Ω RTD resistance (at mid-scale temperature)<br />
can be calculated as given in Equation 30.<br />
1<br />
F 3 dB _ I _ DIFF <br />
2 CIDIFF RI1 RRTD RI2<br />
F<br />
3 dB _ I _ DIFF<br />
402.1Hz<br />
<br />
The –3 dB cutoff frequency of differential reference filter can be calculated as given in Equation 31.<br />
1<br />
F 3 dB _ R _ DIFF <br />
2 CR DIFF RR1 RREF RR2<br />
<br />
<br />
<br />
R REF<br />
Figure 45. Common Mode and Differential Mode Filters on RTD Input and Reference<br />
R I1 = R I2 = 4.12 K<br />
C I_DIFF = 0.047 µF<br />
To ensure that mismatch of the common-mode filtering capacitors is not translated to a differential voltage,<br />
the common-mode capacitors (CI_CM1 and CI_CM2) are chosen to be 10 times smaller than the<br />
differential capacitor. This common-mode capacitors' size results in a common-mode cutoff frequency that<br />
is roughly 10 times larger than the differential filter, making the matching of the common-mode cutoff<br />
frequencies less critical.<br />
C I_CM1 = C I_CM2 = 4700 pF<br />
Although it is not always possible to exactly match the corner frequencies of all the filters, a good<br />
compromise is to attempt to balance the corner frequencies of the input path differential filter and the<br />
reference path differential filter, because these filters have a dominant effect in the performance.<br />
RR1 = RR2 = 4.7 K<br />
CR_DIFF = 0.033 µF<br />
(30)<br />
F<br />
3 dB _ R _ DIFF<br />
405.83 Hz<br />
(31)<br />
TIDU271–May 2014<br />
Submit Documentation Feedback<br />
Temperature Sensor Interface Module for Programmable Logic Controllers<br />
(PLC)<br />
Copyright © 2014, Texas Instruments Incorporated<br />
37