Pseudo-Noise (PN) Ranging Systems - CCSDS
Pseudo-Noise (PN) Ranging Systems - CCSDS
Pseudo-Noise (PN) Ranging Systems - CCSDS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>CCSDS</strong> INFORMATIONAL REPORT CONCERNING PSEUDO-NOISE RANGING SYSTEMS<br />
where:<br />
ρ<br />
TCOR<br />
Ec<br />
ik = ⋅ s<br />
T ∫<br />
c 0<br />
* T<br />
( t)<br />
⋅Ci<br />
( t − kTc<br />
) dt = EcTc<br />
⋅ ρik<br />
⋅<br />
T<br />
Ec<br />
– S(<br />
t)<br />
= ⋅ s(<br />
t)<br />
and s( t)<br />
= sk<br />
for ( k −1)<br />
TC<br />
< t ≤ kTC<br />
are the binary (±1) ranging-<br />
T<br />
c<br />
sequence waveform with chip values sk ∈ {+1, –1};<br />
– TC is the chip duration;<br />
– Tr = LTc is one sequence length;<br />
– ρ * ik are the normalized correlation coefficients (i.e., unit amplitude and correlation<br />
time equal to one sequence length Tr = LTc).<br />
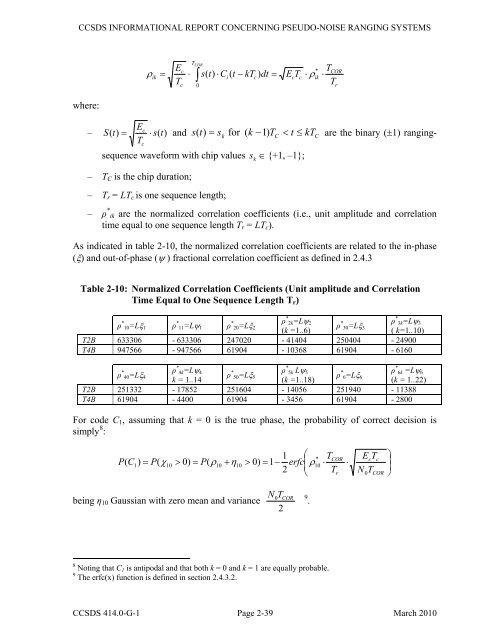
As indicated in table 2-10, the normalized correlation coefficients are related to the in-phase<br />
(ξ) and out-of-phase (ψ ) fractional correlation coefficient as defined in 2.4.3<br />
Table 2-10: Normalized Correlation Coefficients (Unit amplitude and Correlation<br />
Time Equal to One Sequence Length Tr)<br />
ρ * 10=Lξ1 ρ * 11=Lψ1 ρ * 20=Lξ2<br />
ρ * 2k=Lψ2<br />
(k =1..6)<br />
ρ * 30=Lξ3<br />
ρ * 3k=Lψ3<br />
( k=1..10)<br />
T2B 633306 - 633306 247020 - 41404 250404 - 24900<br />
T4B 947566 - 947566 61904 - 10368 61904 - 6160<br />
ρ * 40=Lξ4<br />
ρ * 4k=Lψ4<br />
k = 1..14<br />
ρ * 50=Lξ5<br />
ρ * 5k Lψ5<br />
(k =1..18)<br />
ρ * 6=Lξ6<br />
ρ * 6k =Lψ6<br />
(k = 1..22)<br />
T2B 251332 - 17852 251604 - 14056 251940 - 11388<br />
T4B 61904 - 4400 61904 - 3456 61904 - 2800<br />
For code C1, assuming that k = 0 is the true phase, the probability of correct decision is<br />
simply 8 :<br />
1 ⎛ * ⎜<br />
T<br />
P(<br />
C1)<br />
= P(<br />
χ 10 > 0)<br />
= P(<br />
ρ10<br />
+ η10<br />
> 0)<br />
= 1−<br />
erfc<br />
⎜<br />
ρ10<br />
⋅<br />
2 ⎝ T<br />
being η10 Gaussian with zero mean and variance<br />
N0TCOR<br />
2<br />
8 Noting that C1 is antipodal and that both k = 0 and k = 1 are equally probable.<br />
9 The erfc(x) function is defined in section 2.4.3.2.<br />
<strong>CCSDS</strong> 414.0-G-1 Page 2-39 March 2010<br />
9 .<br />
COR<br />
r<br />
COR<br />
r<br />
⋅<br />
EcT<br />
N T<br />
0<br />
c<br />
COR<br />
⎞<br />
⎟<br />
⎠