An Introduction to Iterative Learning Control - Inside Mines
An Introduction to Iterative Learning Control - Inside Mines
An Introduction to Iterative Learning Control - Inside Mines

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
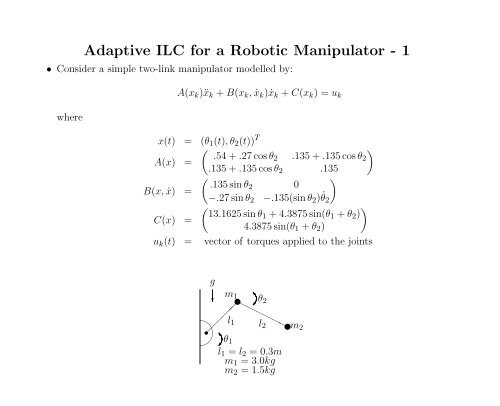
Adaptive ILC for a Robotic Manipula<strong>to</strong>r - 1<br />
• Consider a simple two-link manipula<strong>to</strong>r modelled by:<br />
where<br />
A(xk)¨xk + B(xk, ˙xk) ˙xk + C(xk) = uk<br />
x(t) = (θ1(t), θ2(t)) T<br />
� �<br />
.54 + .27 cos θ2 .135 + .135 cos θ2<br />
A(x) =<br />
.135 + .135 cos θ2 .135<br />
�<br />
.135 sin θ2 0<br />
B(x, ˙x) =<br />
−.27 sin θ2 −.135(sin θ2) ˙ �<br />
θ2<br />
� �<br />
13.1625 sin θ1 + 4.3875 sin(θ1 + θ2)<br />
C(x) =<br />
4.3875 sin(θ1 + θ2)<br />
uk(t) = vec<strong>to</strong>r of <strong>to</strong>rques applied <strong>to</strong> the joints<br />
g<br />
■<br />
✠<br />
�<br />
■<br />
✠<br />
���❍ m1 ❄ ✈ θ2<br />
❍<br />
❍❍❍❍<br />
✘l1<br />
l2 ✈m2<br />
�<br />
✙θ1<br />
l1 = l2 = 0.3m<br />
m1 = 3.0kg<br />
m2 = 1.5kg