Robótica - Revista Metal Actual
Robótica - Revista Metal Actual
Robótica - Revista Metal Actual
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
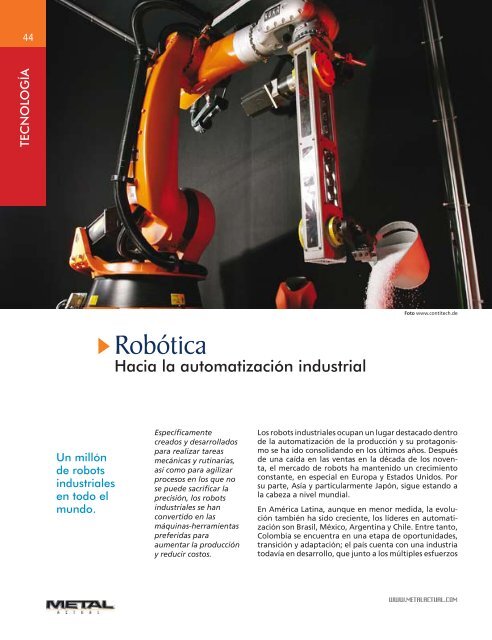
44TECNOLOGÍAFoto www.contitech.deRobóticaHacia la automatización industrialUn millónde robotsindustrialesen todo elmundo.Específicamentecreados y desarrolladospara realizar tareasmecánicas y rutinarias,así como para agilizarprocesos en los que nose puede sacrificar laprecisión, los robotsindustriales se hanconvertido en lasmáquinas-herramientaspreferidas paraaumentar la produccióny reducir costos.Los robots industriales ocupan un lugar destacado dentrode la automatización de la producción y su protagonismose ha ido consolidando en los últimos años. Despuésde una caída en las ventas en la década de los noventa,el mercado de robots ha mantenido un crecimientoconstante, en especial en Europa y Estados Unidos. Porsu parte, Asía y particularmente Japón, sigue estando ala cabeza a nivel mundial.En América Latina, aunque en menor medida, la evolucióntambién ha sido creciente, los líderes en automatizaciónson Brasil, México, Argentina y Chile. Entre tanto,Colombia se encuentra en una etapa de oportunidades,transición y adaptación; el país cuenta con una industriatodavía en desarrollo, que junto a los múltiples esfuerzosWWW.METALACTUAL.COM
46TECNOLOGÍAPor lo general, un robot industriallo define la organización ISO de lasiguiente forma: “una máquina formadapor un mecanismo de motoresy controladores, que incluye variosgrados de libertad, generalmentetiene el aspecto de uno o variosbrazos terminados en una muñeca,capaces de sujetar una herramienta,pieza o dispositivo de inspección. Enparticular, su unidad de control usachips de memoria y a veces puedeemplear aditamentos tipo sensores,para captar información del ambientey las circunstancias de trabajo. Estasmáquinas se suelen diseñar paraejecutar una operación repetitiva yse pueden adaptar a otras operaciones,es decir son reprogramables”.Queda claro entonces que, la principaldiferencia entre un robot y unamáquina convencional es que el primeroes reprogramable, es posiblecambiar la tarea que realiza y aunquedurante largos periodos desempeñeun trabajo específico y repetitivo, sepuede programar y adaptar para realizarnuevas labores, cuantas veces seanecesario. Esto convierte a los robotsen la solución ideal para el cambiantey exigente mundo de la industria.• ClasificaciónSe podría decir que hay tantos robotsen el mundo como métodospara clasificarlos, cada asociacióninternacional de robótica establecediferentes y específicas definicionespara agrupar estos equipos. Algunoslos clasifican según sus aplicacionesy usos, otros según los componentesy tecnología, y también hay quienesprefieren ubicarlos por generacionescronológicamente, según las fechasde construcción.Sin embargo, para el objetivo de esteartículo, los robots industriales básicamentese pueden clasificar segúnsu desarrollo, capacidad y aplicaciónen la industria. Así, el mercado ofrecedesde los brazos robóticos másbásicos, que desempeñan laboressimples de manipulación, hasta sofisticadosequipos que utilizan sensoresTipo AManipuladoresTipo BComputarizadosde precisión porcontrolador lógicoprogramable (PLC)Tipo CComputarizadospor CNCTipo DInteligentes(sensoriales)Fuente: (AFRI) Asociación Francesa de Robótica Industrial.Clasificación de los robots industrialesde espacio para interactuar con suentorno, otras máquinas, e incluso elhombre.Quizás la característica tecnológicaque más identifica a los brazos robóticoses su capacidad de moverse, lacual depende de los grados de libertadque poseen, es decir, el númerode articulaciones que tienen y la posibilidadde movimiento que éstas lebrindan. Así las cosas, con más gradosde libertad, el robot es más útil ypuede ser adaptado a casi todos losprocesos industriales, desde los mássencillos hasta los más complejos.Los grados de libertad de un brazomecánico se pueden comparar conManipulador con control manual o telemando: son robots multifunción,que operan con sistemas mecánicos básicos, y permiten gobernabilidaden sus movimientos. Deben ser utilizados en funciones sencillasy repetitivas, como levantar mercancía y manipular objetos comocajas, botellas, bultos entre otros. Su operabilidad puede realizarse enforma manual, es decir se controla por una o más personas a través decontrol remoto y cuentan con tres y cuatro grados de libertad. Capacidadde carga máxima 5.0 kg. Alcance del brazo: entre 190 y 500 mm.Manipulador automático con ciclos preajustados: cuentan conregulación mediante fines de carrera o alcance de brazo, son muy precisos,tienen un mayor recorrido y fuerza de brazo que los Tipo A y seregulan con un control PLC. Se utilizan para paletizado, corte y soldadura.Tienen cuatro grados de libertad (Scara). Capacidad de carga máxima13.0 kg. Alcance del brazo: entre 190 y 1.000 mm.Robot programable con trayectoria continua o punto a punto:son equipos más avanzados y fuertes, que ejecutan instrucciones previamenteprogramadas por CNC, son muy precisos y se utilizan para trabajosexigentes, durante largos períodos de trabajo y en la producción en serie.Ejemplo: mecanización, soldadura, moldeo, paletizado y fabricaciónde herramientas, entre otras. Modelos de cinco y seis grados de libertad.Capacidad de carga máxima 1.000 kg. Alcance del brazo hasta 3200 mm.Robot capaz de adquirir datos de su entorno: equipos que medianteavanzados sensores de calor, movimiento y espacio, recogen informaciónde su entorno y readaptan sus tareas en función de esta. Son capaces desortear obstáculos, interactuar con otras máquinas y realizar complejas ypeligrosas tareas, como el corte y la soldadura de precisión y la manipulaciónde sustancias tóxicas o radioactivas. Tienen seis grados de libertad, capacidadde carga máxima 1.000 kg., alcance del brazo hasta 3200 mm., unaprecisión de ± 0,04 mm y una velocidad máxima de 9.500 mm/s.los movimientos del brazo y la muñecadel hombre. Por lo general,tanto en el brazo como en la muñeca,se encuentra una variación desiete movimientos, mientras que lamayoría de robots tiene seis tipos demovimientos o grados de libertad.• AplicacionesTeóricamente, el uso de sistemas robóticospodría extenderse a casi todaslas áreas imaginables en dondese necesite de la ejecución de tareasmecánicas; en aquellas actividadesque involucren la presencia física y elmovimiento por parte del ejecutor.WWW.METALACTUAL.COM
Algunos de los campos de aplicación industrial de la robóticason:• Fundición en molde. Carga y descarga de máquinas, manejode materiales calientes, manejo de moldes, etc. Lasdifíciles condiciones de trabajo de fundición hacen necesarioslos robots.• Soldadura de punto. Ampliamente utilizada en la industriaautomotriz, en promedio, este tipo de robot reducea la mitad la fuerza laboral necesaria.• Soldaduras de arco. No requiere de modificaciones sustancialesen el equipo de soldadura y aumenta la flexibilidady la velocidad de trabajo.• Moldeado por extrusión. Para la fabricación de materialestermoplásticos es ideal el uso de robots, por lacreciente demanda de partes especializadas de grancomplejidad y precisión, favorece el aumento de la produccióny la calidad de los productos.• Forjado. Quizás la principal aplicación de los robots industrialeses la manipulación de partes metálicas calientesen el proceso de forjado de metales.• Aplicaciones de prensado. Prensado de partes y panelesde vehículos y estructuras de aviones, electrodomésticosFoto: www.logismarket.esFoto: <strong>Metal</strong> <strong>Actual</strong>Foto: http://picasaweb.google.com/La diferencia entre la maquinariaconvencional y un robot radica en laposibilidad de reprogramar el últimopara cumplir diversos procesos.WWW.METALACTUAL.COM
Factores a tener en cuenta• Carrera: el recorrido o distancia que un robot alcanza, sucarrera, es uno de los elementos a tener en cuenta cuandose va a adquirir un brazo mecánico. Se adquirirá unou otro en función del espacio de trabajo, la ubicación dela pieza y las dimensiones de la máquina. Hay que teneren cuenta el escenario de todo el proceso, por ejemplo,si el robot debe soltar la pieza a un lado de la máquina opor detrás de ésta. La carrera está dada en mm y sustentadaen los movimientos sobre los ejes X (movimientofrontal o profundidad de agarre), Y (movimiento verticalo altura de levante) y Z (movimiento transversal).• Área de trabajo: junto al recorrido del robot es importanteconsiderar el área de trabajo, la ubicación de lapieza, la maquinaria convencional y los operarios conrespecto a la ubicación del brazo mecánico.• Capacidad de carga: desde luego, también hay que teneren cuenta el peso de la pieza, así como el de los instrumentosperiféricos, como el mecanismo de agarre, lapistola o la boquilla del robot. Porque el brazo mecánicodebe soportar la combinación de todos las cargas.• Velocidad: en cuanto a la velocidad, un valor a menudoutilizado como argumento para vender, en ocasiones sepresentan en términos de picos de velocidad (puntos develocidad en un proceso), pero esta información no esválida si no se conoce la aceleración. Es decir, un robotpuede tener un pico de velocidad elevado pero pocaaceleración. El dato más útil es saber en cuánto tiempoun robot puede recorrer una distancia específica.• Seguridad y facilidad de manejo: cada vez más, la facilidaddel manejo es un valor al alza. La pantalla del controly facilidad para conectar el robot con otras máquinas, sonelementos a tener en cuenta. También, al igual que otrosequipos utilizados en la industria, la fiabilidad, la seguridady cuestiones relativas a los elementos de protecciónindustrial en el área de trabajo son muy importantes.• Precio: para terminar, el factor precio, en muchas ocasionesdecisivo. Sin embargo, más que mirar el precio comoun dato aislado, conviene dedicar un tiempo a analizarlos ahorros que se pueden obtener reduciendo los tiemposmuertos o aumentando el tiempo de ciclo.Foto: www.news.thomasnet.comLos nuevosmodelos estánequipadoscon sensoresque registraninformaciónparainteractuarcon elentorno.WWW.METALACTUAL.COM
50TECNOLOGÍAPara puntualizar, el costo del robotdepende de sus especificaciones, capacidad,flexibilidad y tecnología.Además de los factores complementarioscomo equipos periféricos, dispositivosde fijación y señalización,puesta en marcha y puesta a punto,servicio postventa, entrenamiento ymantenimiento. Usualmente una solucióncompleta puede estar por elorden de 30.000 y 70.000 dólares, sinembargo, hay industrias que por sutamaño requieren de más recursos.Foto: <strong>Metal</strong> <strong>Actual</strong>Made in ColombiaColombia cuenta también con una compañía dedicada a la fabricación de brazos robóticos para laindustria, se trata de Micromac, un proyecto liderado por la Gobernación de Risaralda y la Cámarade Comercio de Dosquebradas, con el apoyo del Fondo Colombiano para el Desarrollo de las Mipymes(FoMipyme).Desde hace dos años, con diseño nacional y un 95 por ciento de materiales colombianos, cuatroingenieros liderados por el diseñador y desarrollador Pablo Pérez Santiago, emprendieron la tarea deconstruir dos tipos de equipos robotizados especiales para la industria nacional, de aplicación parala soldadura MIG-MAG, el cortecon plasma, paletizado, pinturay manipulación de piezas y herramientas.Hasta el momentose han construido dos prototiposque están trabajando conéxito en una de las compañíasmetalmecánicas de Risaralda.<strong>Actual</strong>mente se tienen cerca de40 solicitudes de compra.El primer robot fue nombradoAxon LV 04, este cuenta concuatro grados de libertad, unacapacidad de carga máxima de4.0 Kg, área de trabajo de 2.0mts y alcance vertical de 80 cm.El segundo equipo es se bautizóAxon LV J3 05, diseñado conseis grados de libertad, para unárea de trabajo de 2,40 mts y unalcance vertical de 1,70 mt, precisiónde 0,5 mm. Ambos tienendisponibles sistemas de visiónbásicos por pixel, sistemas portapinzas, mesa de trabajo y posibilidadde desplazamiento.Axon LV J3 05, primer robotindustrial nacional comercializadoSegún el Ingeniero Puentes, generalmentela productividad de unacompañía que ha automatizado omejor aún, robotizado sus procesos,aumenta en 40 por ciento, índice quegarantiza más utilidades y reorganizaciónde la mano de obra calificada,que puede ser asignada a otros trabajos,más convenientes para el serhumano. Por ejemplo, al no emplearun operario para hacer una labor repetitivade soldadura de punto y reemplazarlopor un robot, el operarioInformes:www.micromacrobots.compuede convertirse en el supervisorde línea de calidad y así garantizarla excelencia del proceso. En últimas,el objetivo de la automatización noes eliminar puestos de trabajo, por elcontrario, con una mayor productividady crecimiento, las empresas loque hacen es ampliar sus nóminas endiversas áreas: administrativa, comercial,técnica, tecnológica, inventariosy contabilidad etc.A simple vista, la inversión inicial esalta, sin embargo, si se compara entérminos de costo - beneficio, puederecuperarse en un corto periodo, graciasa que las ventajas de los robotsindustriales son realmente representativaspara las diferentes industrias.Con la robotización es posible reducirtiempos, labores, mano de obrano calificada y aumentar la productividad,así como el incremento de lautilización de maquinaria y mejorade la calidad.Fuentes• Diana Rojas. Ingeniera Industrial UniversidadIndustrial de Santander.agapirojas@hotmail.com• Germán Acevedo. Ingeniero Electrónico.german@psh4riders.com• Juan Carlos Puentes. Ingeniero AsesorMavicontrol Ltda. www.mavicontrol.com -jpuentes@mavicontrol.com• Pablo Pérez Santiago. Ingeniero Diseñador yDesarrollador de Micromac.. www.micromacrobots.com- micromacplec@hotmail.com.• Monografía, “Robótica y Aplicaciones”.Autores:Ana María González anitaga@mixmail.comy Mauricio Espina mauricioe@entelchile.net• Principios básicos de la robótica. Autor:Antonio Sánchez• Robótica. Autor: Anibal Ollero Baturone• Comité Español de Automática• World Robotic 2008• www.chi.items.mx, www.robotiker.com,www.festo-didactic.com, www.cfievalladolid2.net,www.roboticspot.com, www.eupmt.es, www.mitsubishi.com, www.inserrobotica.comWWW.METALACTUAL.COM