Robótica - Revista Metal Actual
Robótica - Revista Metal Actual
Robótica - Revista Metal Actual
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
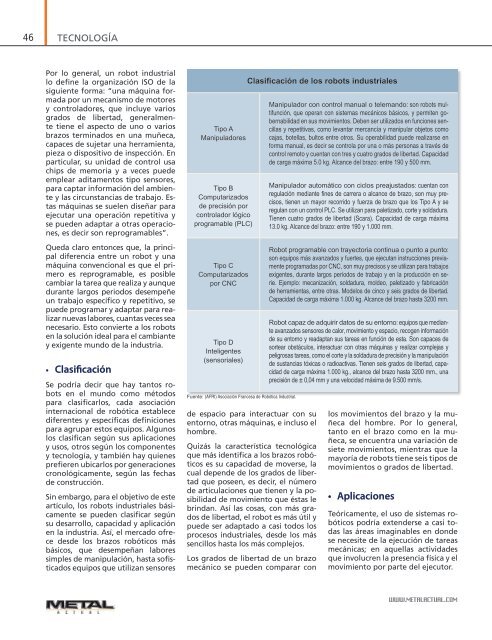
46TECNOLOGÍAPor lo general, un robot industriallo define la organización ISO de lasiguiente forma: “una máquina formadapor un mecanismo de motoresy controladores, que incluye variosgrados de libertad, generalmentetiene el aspecto de uno o variosbrazos terminados en una muñeca,capaces de sujetar una herramienta,pieza o dispositivo de inspección. Enparticular, su unidad de control usachips de memoria y a veces puedeemplear aditamentos tipo sensores,para captar información del ambientey las circunstancias de trabajo. Estasmáquinas se suelen diseñar paraejecutar una operación repetitiva yse pueden adaptar a otras operaciones,es decir son reprogramables”.Queda claro entonces que, la principaldiferencia entre un robot y unamáquina convencional es que el primeroes reprogramable, es posiblecambiar la tarea que realiza y aunquedurante largos periodos desempeñeun trabajo específico y repetitivo, sepuede programar y adaptar para realizarnuevas labores, cuantas veces seanecesario. Esto convierte a los robotsen la solución ideal para el cambiantey exigente mundo de la industria.• ClasificaciónSe podría decir que hay tantos robotsen el mundo como métodospara clasificarlos, cada asociacióninternacional de robótica establecediferentes y específicas definicionespara agrupar estos equipos. Algunoslos clasifican según sus aplicacionesy usos, otros según los componentesy tecnología, y también hay quienesprefieren ubicarlos por generacionescronológicamente, según las fechasde construcción.Sin embargo, para el objetivo de esteartículo, los robots industriales básicamentese pueden clasificar segúnsu desarrollo, capacidad y aplicaciónen la industria. Así, el mercado ofrecedesde los brazos robóticos másbásicos, que desempeñan laboressimples de manipulación, hasta sofisticadosequipos que utilizan sensoresTipo AManipuladoresTipo BComputarizadosde precisión porcontrolador lógicoprogramable (PLC)Tipo CComputarizadospor CNCTipo DInteligentes(sensoriales)Fuente: (AFRI) Asociación Francesa de Robótica Industrial.Clasificación de los robots industrialesde espacio para interactuar con suentorno, otras máquinas, e incluso elhombre.Quizás la característica tecnológicaque más identifica a los brazos robóticoses su capacidad de moverse, lacual depende de los grados de libertadque poseen, es decir, el númerode articulaciones que tienen y la posibilidadde movimiento que éstas lebrindan. Así las cosas, con más gradosde libertad, el robot es más útil ypuede ser adaptado a casi todos losprocesos industriales, desde los mássencillos hasta los más complejos.Los grados de libertad de un brazomecánico se pueden comparar conManipulador con control manual o telemando: son robots multifunción,que operan con sistemas mecánicos básicos, y permiten gobernabilidaden sus movimientos. Deben ser utilizados en funciones sencillasy repetitivas, como levantar mercancía y manipular objetos comocajas, botellas, bultos entre otros. Su operabilidad puede realizarse enforma manual, es decir se controla por una o más personas a través decontrol remoto y cuentan con tres y cuatro grados de libertad. Capacidadde carga máxima 5.0 kg. Alcance del brazo: entre 190 y 500 mm.Manipulador automático con ciclos preajustados: cuentan conregulación mediante fines de carrera o alcance de brazo, son muy precisos,tienen un mayor recorrido y fuerza de brazo que los Tipo A y seregulan con un control PLC. Se utilizan para paletizado, corte y soldadura.Tienen cuatro grados de libertad (Scara). Capacidad de carga máxima13.0 kg. Alcance del brazo: entre 190 y 1.000 mm.Robot programable con trayectoria continua o punto a punto:son equipos más avanzados y fuertes, que ejecutan instrucciones previamenteprogramadas por CNC, son muy precisos y se utilizan para trabajosexigentes, durante largos períodos de trabajo y en la producción en serie.Ejemplo: mecanización, soldadura, moldeo, paletizado y fabricaciónde herramientas, entre otras. Modelos de cinco y seis grados de libertad.Capacidad de carga máxima 1.000 kg. Alcance del brazo hasta 3200 mm.Robot capaz de adquirir datos de su entorno: equipos que medianteavanzados sensores de calor, movimiento y espacio, recogen informaciónde su entorno y readaptan sus tareas en función de esta. Son capaces desortear obstáculos, interactuar con otras máquinas y realizar complejas ypeligrosas tareas, como el corte y la soldadura de precisión y la manipulaciónde sustancias tóxicas o radioactivas. Tienen seis grados de libertad, capacidadde carga máxima 1.000 kg., alcance del brazo hasta 3200 mm., unaprecisión de ± 0,04 mm y una velocidad máxima de 9.500 mm/s.los movimientos del brazo y la muñecadel hombre. Por lo general,tanto en el brazo como en la muñeca,se encuentra una variación desiete movimientos, mientras que lamayoría de robots tiene seis tipos demovimientos o grados de libertad.• AplicacionesTeóricamente, el uso de sistemas robóticospodría extenderse a casi todaslas áreas imaginables en dondese necesite de la ejecución de tareasmecánicas; en aquellas actividadesque involucren la presencia física y elmovimiento por parte del ejecutor.WWW.METALACTUAL.COM